Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Загальна методика силового розрахункуСодержание книги
Поиск на нашем сайте
Рис. 3.4
Під час руху механізму в кінематичних парах діють сили, що є силами взаємодії між ланками. Сили взаємодії ланок, що виникають в місцях їх дотику, називають реакціями в кінематичних парах. Навантаженість кінематичних пар реакціями є важливою динамічною характеристикою механізму. Знання сил в кінематичних парах має велике практичне значення для розрахунків ланок механізму на міцність, жорсткість, вібростійкість, стійкість проти спрацьовування, для розрахунку вальниць на довговічність та для проведення інших подібних розрахунків, що виконуються при проектуванні механізмів. Таким чином силовий розрахунок включає, перш за все, визначення реакцій у кінематичних парах. Зовнішні сили, що прикладені до ланок механізму, як правило, задані. Визначенню підлягає лише зовнішня зрівноважувальна сила (зрівноважувальний момент), що прикладена до вхідної ланки, при якій забезпечується прийнятий закон її руху. Силовий розрахунок механізмів може бути виконаний різними методами. В ТММ досить широке застосування отримав метод силового розрахунку механізмів на основі звичайних рівнянь рівноваги твердих тіл. Суть методу зводиться до застосування рівнянь рівноваги у формі Д’Аламбера. Для цього силу інерції, яка є протидією тіла, що прискорюється, та яка прикладена до тіла, що надає це прискорення, умовно переносять на тіло, що прискорюється. Перенесена сила зрівноважується з усіма зовнішніми силами, в тому числі і з реакціями, що діють на це тіло. Стосовно механізмів суть методу може бути сформульована так: якщо до всіх зовнішніх сил, що діють на ланку (групу Ассура, механізм) додати сили інерції (моменти), то під дією усіх цих сил ланку (групу Ассура, механізм) можна розглядати як таку, що умовно перебуває в рівновазі. Цей метод дозволяє записати рівняння руху у формі рівнянь рівноваги, тим самим задачу динаміки розв’язати методами статики. Таким чином, при застосуванні принципу Д’Аламбера до розрахунку механізмів, крім зовнішніх сил, вводяться в розрахунок сили інерції, які виникають при русі ланок і діють як додаткові (фіктивні) сили. Нагадаємо, під силою інерції розуміють кінетичну реакцію тіла на прискорення, яке надається йому ззовні. Сили інерції – це сили, обумовлені масою та рухом тіла з прискоренням. Сили інерції тіла (ланки) являють собою результат сумарної дії елементарних сил інерції кожної точкової маси тіла. Для зручності розрахунків незлічену систему елементарних сил інерції, що відповідають точковим масам, замінюють рівнодійними силами та парами. В загальному випадку, якщо тіло (ланка) здійснює плоскопаралельний рух, частіше за все елементарні сили інерції зводяться до одного головного вектора сил інерції (скорочено сили інерції), прикладеного в центрі мас тіла, та головного момента сил інерції (скорочено момента сил інерції) Метод силового розрахунку механізму з врахуванням сил інерції та застосуванням рівнянь динамічної рівноваги часто називають кінетостатичним розрахунком механізмів, на відміну від статичного розрахунку, при якому не враховуються сили інерції. У сучасних швидкохідних машинах слід обов’язково враховувати сили інерції ланок механізму, бо значення цих сил можуть значно перевищувати за величиною прикладене зовнішнє навантаження. Таким чином, силовий розрахунок механізмів будемо виконувати методом кінетостатики, умовно приклавши до кожної рухомої ланки механізму, крім зовнішніх сил
Часто в розрахунках рівняння (1) та (2) замінюють одним еквівалентним векторним рівнянням
Головний вектор
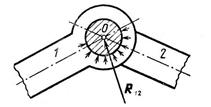
Невідомі реакції визначаються з рівнянь (1) – (4), в які вони входять у складі сум Зазначимо, до викладена методика – для силового розрахунку плоских механізмів. При цьому прийнято, що механізм має площину симетрії, яка паралельна площині руху і в якій діють усі прикладені сили. Вказаній умові відповідає дуже велика кількість механізмів енергетичних, технологічних, транспортних машин та різних приладів. При русі механізму в його кінематичній парі виникають сили тертя, що гальмують рух, знижують коефіцієнт корисної дії механізму. Силовий розрахунок може бути виконаний як з урахуванням, так і без урахування тертя. У першому наближенні проводять розрахунок без урахування сил тертя в кінематичних парах, розглядаючи механізм як систему з ідеальними в’язями. Відзначимо, у більшості випадків сили тертя малі, порівняно з іншими силами, що діють на механізм, тому уточнений розрахунок часто не робиться. Розглянемо дію сил в кінематичних парах. Реакція, тобто сила взаємодії ланок, що утворюють нижчу кінематичну пару, представляє собою рівнодіючу елементарних сил (елементарних тисків однієї ланки на іншу), розподілених по поверхні дотику ланок. Як відомо, сила взаємодії між двома тілами, що дотикаються (якщо нехтувати силами тертя), напрямлена по спільній нормалі до поверхні стикання. Таким чином, у поступальній кінематичній парі всі елементарні сили, а отже і їх рівнодійна – реакція R12 (рис. 3.5), будуть напрямлені по нормалі до напрямної кінематичної пари х-х. Реакція, як і будь-яка сила, характеризується трьома параметрами: величиною (модулем), напрямком і точкою прикладання. Величина і точка прикладання реакції невідомі і повинні бути визначені в процесі силового розрахунку. Таким чином, поступальна пара вносить в рівняння (1) – (4) два невідомих параметри. Сказане повністю стосується і реакції R21, яка прикладена до ланки 2 з боку ланки 1, оскільки сили взаємодії ланок R12, R21 зв’язані третім законом Ньютона: Розглянемо обертальну кінематичну пару V класу (рис. 3.6). Якщо знехтувати силами тертя, то рівнодійна R12 елементарних тисків однієї ланки на іншу, напрямлена по нормалі до циліндричних поверхонь дотику обох ланок, пройде через центр шарніра O. Положення центра шарніра завжди відоме, але невідомі ні величина цієї реакції, ні її напрям.
Рис. 3.5
Таким чином, від кожної реакції, що діє в нижчій кінематичній парі, в розрахункових рівняннях (1) – (4) з’являться два невідомі параметри. У вищій парі IV класу (рис. 3.7) реакція R12 прикладена в точці А дотику ланок 1 та 2 і напрямлена вздовж спільної нормалі n-n (тертя не враховується). Таким чином, для реакції R 12 відомі як точка прикладання, так і лінія дії; невідомим є тільки її модуль.
Рис. 3.6 Рис. 3.7 Умови статичної визначеності плоских механізмів, кінематичних ланцюгів. Розглянемо плоский механізм, що складається з n рухомих ланок та p5 нижчих (V класу) і у p4 вищих (IV класу) кінематичних пар. Для цього механізму можна скласти 3n рівнянь рівноваги; число невідомих параметрів під час визначення реакцій у кінематичних парах цього ланцюга становитиме 2p5 + p4. Щоб задача була статично визначеною, кількість рівнянь рівноваги повинна дорівнювати числу невідомих, що входить до них, тобто 3n = 2p5 + p4. Запишемо для плоского кінематичного ланцюга формулу Чебишева у вигляді 3n = 2p5 + p4 + W. Порівнюючи вирази, роблять висновок: механізм без залишкових в’язей є статично визначеним. W рівнянь, що залишились, використовуються для визначення тих зовнішніх силових факторів, які не задані в силовому розрахунку і є шуканими. В багатьох підручниках невідомий зовнішній силовий фактор називається зрівноважувальною силою (моментом). У той же час, для будь-якої структурної групи Ассура справедливе співвідношення 3n = 2p5 + p4. Отже, будь-яка структурна група є статично визначеною, а тому при силовому розрахунку доцільно розглядати рівновагу окремих структурних груп. Послідовність силового розрахунку механізмів. При силовому розрахунку невідомими будуть внутрішні сили в кінематичних парах, тобто реакції, та часто зрівноважувальна сила (момент). Щоб визначити їх, механізм треба розкласти на групи Ассура. Оскільки групи Ассура є статично визначеними, механізм розкладається на групи Ассура та механізм І класу. При цьому необхідно, щоб зрівноважувальна сила була прикладена до рухомої ланки механізму І класу. Підкреслимо, що при такому розкладанні механізму, в кожній групі Ассура невідомими будуть тільки реакції. Після того, як силовий розрахунок усіх груп Ассура виконано, механізм І класу також буде статично визначеним. Підсумуємо: силовий розрахунок механізму потрібно проводити за структурними групами Ассура, починаючи з групи, яка приєднана останньою у процесі утворення механізму, і завершувати розрахунком механізму І класу. Таким чином, послідовність силового розрахунку є зворотньою до послідовності кінематичного дослідження.
|
||||||
|
|
Последнее изменение этой страницы: 2016-06-22; просмотров: 229; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.164.100 (0.01 с.) |


 , де m – маса тіла; as – прискорення центра мас тіла;
, де m – маса тіла; as – прискорення центра мас тіла;  – кутове прискорення тіла; Is – момент інерції тіла відносно осі, що проходить через центр мас, перпендикулярно площині його руху. Головний вектор сил інерції
– кутове прискорення тіла; Is – момент інерції тіла відносно осі, що проходить через центр мас, перпендикулярно площині його руху. Головний вектор сил інерції  спрямований протилежно вектору прискорення центра мас
спрямований протилежно вектору прискорення центра мас  . Головний момент сил інерції
. Головний момент сил інерції  спрямований протилежно кутовому прискоренню
спрямований протилежно кутовому прискоренню  .
. (моментів
(моментів  ), головний вектор
), головний вектор  , (1)
, (1) , (2)
, (2) . (3)
. (3) . (4)
. (4) та головний момент
та головний момент  сил інерції визначаються з відомих формул:
сил інерції визначаються з відомих формул:
 , з відомими зовнішніми силами.
, з відомими зовнішніми силами. Відзначимо, що реакції в кінематичних парах будемо позначати двома нижніми індексами: перший вказує номер ланки, на яку діє сила, другий – номер ланки, з боку якої діє сила.
Відзначимо, що реакції в кінематичних парах будемо позначати двома нижніми індексами: перший вказує номер ланки, на яку діє сила, другий – номер ланки, з боку якої діє сила.