
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Теорія механізмів і машин. Навчальний посібник / М.П. Ярошевич – Луцьк: ЛНТУ, 2008. – 216 с.Содержание книги
Поиск на нашем сайте Теорія механізмів І машин
Навчальний посібник для студентів напрямку 6.090200 „Інженерна механіка” денної та заочної форм навчання
Луцьк 2008
УДК 621.01(07) ББК 34.41 Я7 Я77 Теорія механізмів і машин. Навчальний посібник / М.П. Ярошевич – Луцьк: ЛНТУ, 2008. – 216 с. У навчальному посібнику у стислій і доступній формі викладені основні положення теорії механізмів і машин. Зміст викладеного відповідає навчальній програмі для вищих технічних закладів. Посібник розрахований перш за все на студентів очної форми навчання, для яких навчальним планом передбачений курс лекцій обсягом 54 години та здача екзамену. Він може бути використаний для вивчення курсу “Прикладна механіка”. Рецензенти: проф., д.т.н. І.В. Кузьо, проф., д.т.н. В.І. Шваб’юк Відповідальний за випуск: проф., д.т.н. М.П. Ярошевич Затверджено науково-методичною радою ЛНТУ, протокол № __ від __ ________ р. Рекомендовано до друку науково-методичною радою ННВ ІІ та ІТ ЛНТУ, протокол № ___ від __ __________ р. Розглянуто на засіданні кафедри ТММ і ДМ, протокол № від ___ __________ р.
© М.П.Ярошевич, 2008
ВСТУП
Ефективна робота народногосподарського комплексу нашої держави в ринкових умовах не можлива без оснащення його високопродуктивними, енергетично малозатратними, надійними і довговічними машинами. Створення таких машин вимагає від інженерів-механіків глибоких і міцних знань, в першу чергу, у сфері теорії механізмів і машин (ТММ).
З історії науки Механіка – одна з найдавніших наук. Відомості про перші механізми губляться в глибині століть. Перші з них – це майстерно виконані штучні механізми – пастки для відлову звірів, про що свідчать рисунки на скелях і стінах печер (кам’яний вік). Прості механізми (важелі, гвинти, клини, зубчасті та інші) були відомі з давніх часів. Поступово йшов процес їх дослідження, вдосконалення та впровадження в практику з метою полегшити працю людини, підвищити продуктивність праці. Як наука теорія механізмів і машин виникла в кінці XVIII ст., коли почався бурхливий розвиток промисловості в Англії, Франції, Німеччині. Потреби машинного виробництва спонукали до розвитку науки. І в подальшому розвиток ТММ нерозривно пов’язаний з розвитком машинного способу виробництва. Про внесок видатних вчених у науку про механізми буде сказано в етапах викладу курсу ТММ. Відмітимо тільки, що радянська школа спеціалістів у сфері теорії механізмів і машин була визнана в усьому світі. Розвиток науки і освіти в Україні в галузі ТММ пов’язаний з іменами таких відомих вчених як, С.Н. Кожевніков, Я.Л. Геронімус, О.С. Кореняко, Л.І. Цехнович, А.Ф. Попов, К.В. Тір та інші. РОЗДІЛ 1. ЗАГАЛЬНІ МЕТОДИ ВИЗНАЧЕННЯ КІНЕМАТИЧНИХ І ДИНАМІЧНИХ ХАРАКТЕРИСТИК МЕХАНІЗМІВ І МАШИН
Структура та класифікація механізмів
Структура механізму - це його будова. Будовою механізму визначаються такі його важливі характеристики, як види виконуваних рухів, способи їх перетворення, число ступенів вільності. Основними структурними елементами механізму є ланки (тверді тіла) та кінематичні пари (рухомі з’єднання твердих тіл). Тобто, з погляду ТММ, будь-який механізм чи машина складаються лише з ланок, які з’єднані між собою кінематичними парами.
Кінематичні ланцюги. Кінематичним ланцюгом називають сукупність ланок, з’єднаних між собоюкінематичними парами. Отже, в основі кожного механізму лежить кінематичний ланцюг. Але при цьому не кожний кінематичний ланцюг є механізмом. Кінематичний ланцюг - це будь-яке з’єднання ланок кінематичними парами. Механізм, призначений для отримання певних, наперед заданих рухів. Тільки той кінематичний ланцюг буде механізмом, ланки якого здійснюють доцільні рухи, що слідують з інженерних, виробничих потреб, для виконання яких сконструйовано механізм. Тобто, ланки в механізмі з’єднуються не будь-яким чином, а за певними правилами. Кінематичні ланцюги бувають: простими і складними, замкненими і незамкненими, плоскими і просторовими. У простому ланцюзі кожна ланка входить в одну або дві кінематичні пари (рис. 1.3, a). Якщо хоча б одна ланка входить більше як до двох кінематичних пар, то такий ланцюг називається складним ( рис. 1.10, б, в, г). Прості та складні кінематичні ланцюги, в свою чергу, поділяються на замкнені і незамкнені. Незамкненим називається ланцюг, у якого є ланка, що входить лише в одну кінематичну пару (рис. 1.4, ж). Замкненим називається ланцюг, кожна ланка якого входить не менш як у дві кінематичні пари (рис. 1.3, а). У замкненому ланцюзі ланки утворюють один або декілька контурів. Плоским називають ланцюг, всі точки якого описують плоскі траєкторії або траєкторії, що лежать в одній чи паралельних площинах (рис. 1.3, а). Просторовим називають ланцюг, у якого точки ланок описують просторові траєкторії або траєкторії, розташовані в пересічних площинах (рис. 1.4).
Рис. 1.9 Усі складніші можуть бути отримані шляхом приєднання до механізмів І класу додаткових кінематичних ланцюгів - структурних груп Ассура. Очевидно, щоб створити новий механізм з одним ступенем вільності, W =1 (з іншими властивостями), до механізму І класу треба приєднати лише такі кінематичні ланцюги, які мають W=0, тобто групи Ассура. При розгляді питань класифікації механізмів зручно обмежитися розглядом механізмів, у яких всі вищі пари IV класу попередньо замінені відповідними кінематичними ланцюгами, що утворені лише кінематичними парами V класу, p4=0. Тоді, для структурних груп Ассура, справедлива рівність WГр=3n-2p5=0. (1.4) З (1.4) дістанемо співвідношення p5= Таблиця 1.1
Зауважимо, що групи Ассура можуть мати лише парне число ланок, бути дво-, чотири-, шестиланковими і т.ін. Задаючись співвідношеннями ланок і кінематичних пар (табл. 1.1), можна дістати різні групи Ассура. Усі одержані таким чином групи Ассура поділено на класи: II, III, IV і т.д. У свою чергу, приєднуючи до механізму (чи механізмів) I класу групи Ассура різних класів, можна отримати найрізноманітніші механізми, відповідно механізми II, III, IV і т.д. класів. Відзначимо що поділ груп за класами зумовлено методами кінематичного і силового аналізів, що властиві групам кожного класу. Отже, найпростіша група Ассура складається з двох ланок і трьох кінематичних пар V класу - група Ассура ІІ класу ІІ порядку або двоповодкова група. Оскільки пари V класу в плоских механізмах можуть бути обертовими та поступальними, то залежно від співвідношення їх числа та розташування можливі 5 видів (модифікацій) такої групи. На рис. 1.10, а зображено групи Ассура ІІ класу ІІ порядку І, ІІ, ІІІ, IV, V видів; штриховими лінями показані ланки (поводки), до яких приєднуються дані структурні групи; це можуть бути рухома ланка або стояк механізму І класу, або ж ланки інших, вже приєднаних груп Ассура, при цьому не можна приєднувати структурну групу до однієї ланки. Зазначимо, що, приєднуючи до механізму І класу групу Ассура ІІ класу ІІ порядку І виду, дістанемо шарнірний чотириланковик, рис. 1.3, а; - ІІ виду – кривошипно-повзунний механізм, рис. 1.1; - ІІІ виду - кулісний механізм, рис. 1.3, в. Механізми, до складу яких входять групи Ассура не вище другого класу - це механізми ІІ класу. Наступна, більш складна група Ассура складається з чотирьох ланок і шести кінематичних пар - група ІІІ класу ІІІ порядку або триповодкова група. Характерною особливістю цієї групи є наявність ланки, що входить у три кінематичні пари й утворює жорсткий трикутник; таку ланку називають базисною. Найпростіша група ІІІ класу, з одними обертовими парами, зображена на рис. 1.10, в. В частинному випадку базисна ланка може бути прямолінійною, а деякі кінематичні пари - поступальними (рис. 1.10, б). Механізми, до складу яких входять групи Ассура не вище третього класу - механізми ІІІ класу. Другий можливий кінематичний ланцюг, що складається з чотирьох ланок і шести пар (рис. 1.10, г) – група ІV класу ІІ порядку. Особливістю цієї групи є наявність рухомого чотиристороннього замкненого контуру. Очевидно, можливо отримати різні модифікації цих груп, якщо обертові пари комбінувати з поступальними. Більш складні групи V і вищих класів використовуються обмежено і тут не розглядаються. Таким чином групи Ассура діляться на класи і порядки. Клас групи Ассура визначається найвищим класом контура, що входить до її складу (за І.І. Артоболевским, клас структурної групи Ассура визначається числом кінематичних пар, що утворюють найбільш складний замкнутий контур). Основою структурної групи є замкнутий контур. Клас контура визначається кількістю кінематичних пар, у які входять ланки, що його утворюють. Механізму І класу присвоюють І клас контура (контур виродився у точку; є лише одна кінематична пара); ланка з двома парами – ІІ клас (також частковий випадок замкнутого контура – контур виродився у пряму); жорстка ланка з трьома парами – ІІІ клас (рис. 1.11, в – трикутник); контур з чотирма парами – ІV клас і т.ін. Порядок групи Ассура визначається кількістю вільних (зовнішніх) елементів кінематичних пар (поводків), якими група Ассура приєднується до існуючого механізму. Вид групи Ассура для груп ІІІ та вищих класів не визначається.
Рис. 1.10
Клас механізму в цілому визначається найвищим класом групи, яка входить до його складу. Зазначимо що, визначаючи клас механізму, потрібно вказати, яка з ланок є початковою, оскільки залежно від її вибору може змінюватися клас механізму. Структурний аналіз механізму належить проводити шляхом розбивки його на структурні групи Ассура та механізми І класу у послідовності, зворотній до утворення механізму. Рис. 1.12
На рис. 1.12, б, в наведено інші приклади заміни вищих кінематичних пар нижчими. Якщо одна з ланок, що утворює вищу пару, буде мати прямолінійний профіль, то замість обертової пари вводиться поступальна (центр кривини такого профілю знаходиться на нескінченості). У випадку, коли одним з елементів є точка (загострення), то радіус кривини звичайно дорівнює нулю, і, відповідно, одна з обертових пар буде знаходитися у даній точці.
Плани механізму
Визначення переміщень, положень ланок і траєкторій, що описують окремі точки ланок, тобто розв’язання першої основної задач кінематики, можна виконати графічними або аналітичними методами. Досить широко використовується графічний метод - за допомогою побудови планів механізму. Зображення кінематичної схеми механізму у вибраному масштабі при відповідному положенні початкової ланки називається планом механізму. Графічне розв’язування задач теорії механізмів потребує зображення різноманітних фізичних величин (шляху, довжин ланок, швидкостей, прискорень, сил і т. ін.) у вигляді ліній тієї чи іншої довжини. Для цього користуються масштабним коефіцієнтом. Масштабний коефіцієнт (масштаб) є відношення дійсного значення зображуваної величини до довжини відрізка, який цю величину зображує на кресленні. Масштаб позначається літерою μ з індексом того параметра, який зображується графічно.
Таким чином, масштаб довжини – це відношення натурального розміру ланки в метрах до довжини відрізка в міліметрах, який зображує цю ланку на кресленні (плані механізму), При виборі масштабу рекомендують дотримуватися стандартних креслярських масштабів, а також міркувань зручності підрахунків та наочності зображення. Наприклад, масштабу М1:1 відповідає масштабний коефіцієнт μl = 0,001м/мм, масштабу М1:2 відповідає μl=0,002м/мм і т.ін. Для побудови планів механізму повинні бути задані розміри всіх його ланок, а якщо будується одне конкретне положення механізму і положення початкової ланки. У русі більшості механізмів спостерігається циклічність, при цьому усі кінематичні параметри механізмів змінюються періодично. Тому, зазвичай, при дослідженні механізмів будують ряд послідовних положень механізму. При виконанні курсових проектів, як правило, кінематична схема механізму будується для 12 положень.
Послідовність побудови планів механізму: - вибирають масштаб побудови - знаходять довжини відрізків, якими на кресленні зображатимуться ланки (рис. 2.1– - перш за все, на креслення наносять положення нерухомої ланки (намічаються нерухомі точки механізму, наносяться, при наявності, нерухомі напрямні; на рис. 2.1 - т. О1, С); - викреслюють задане положення початкової ланки. Якщо будується n планів механізму, то знаходять початкові (“мертві”, крайні) положення механізму і, відповідно, початкової ланки; - лише після цього викреслюють групи Ассура в порядку їх приєднання при утворенні механізму. Наголосимо, що доцільно за початкове положення механізму (кривошипа) вибрати те, яке відповідає одному з крайніх положень вихідної ланки (ланки, до якої прикладена сила корисного опору, або рушійна сила). У кривошипно-повзунному механізмі чи шарнірному чотириланковику (або якщо вони лежать в основі розглядуваних механізмів) вихідна ланка перебуватиме у крайніх положеннях, коли кривошип накладатиметься на шатун, або витягуватиметься в одну лінію з ним. У кулісному механізмі вихідна ланка (куліса СД, рис. 1.3, в) перебуватиме у крайніх положеннях, коли кривошип АВ і куліса утворять прямий кут. Зазначимо, що з двох крайніх положень механізму за початкове вибирають те, що відповідає початку робочого ходу. Оскільки в більшості машин робочий хід здійснюється повільніше (рівномірніше) ніж холостий, то він відповідає руху кривошипа з одного крайнього положення до іншого через більший з центральних кутів. Більший з центральних кутів, що описує кривошип при русі механізму з одного крайнього положення до іншого, називається кутом робочого ходу. Розглянемо побудову 12 планів механізму на прикладі шарнірного чотириланковика, структурна схема якого зображена на рис. 1.3, а. Виконуємо перші три пункти наведеної вище послідовності побудови планів. Після цього, радіусом О1А (рис. 2.1) проводимо коло з центром у т. О1, яке є геометричним місцем миттєвих положень т. А кривошипа 1. Як відомо, закон руху початкової ланки в загальному випадку задається у вигляді рівняння Для визначення положення ланок 2 і 3 достатньо встановити положення кінематичної пари В, що шарнірно з’єднує ці ланки між собою. Для цього умовно роз’єднуємо шарнір у т. В і розглядаємо можливі рухи цієї точки. Оскільки нерухомий центр обертання С займає цілком певне положення, то т. В, яка знаходиться на сталій відстані ВС від т. С, може описати тільки дугу Отже, якщо потрібно побудувати, наприклад, 3 -тє положення механізму, то з точки А3 радіусом R=AB робимо засічку на дузі Якщо до складу механізму входять декілька груп Ассура, то їх плани будуються аналогічно. На планах механізму, у разі необхідності, можна побудувати траєкторії, що описують окремі точки ланок. Траєкторії різних точок шатуна мають різноманітну форму, оскільки шатун здійснює плоскопаралельний рух. Траєкторії точок, що розміщені на ланках, які здійснюють плоскопаралельний рух, називають шатунними кривими. Точність побудованої траєкторії залежить від вибраного числа положень механізму і масштабу
Рис. 2.1
Зазначимо, що залежно від вибору положення точки (F, E, K, Н, G) на шатуні отримуються різні шатунні криві (рис. 2.2). Окремі ділянки деяких кривих мало відрізняються від прямих або дуг кіл. Ці ділянки можуть бути використані для спрямляючих механізмів або механізмів із зупинками. Шатунні криві в сучасній техніці широко використовуються для виконання певних рухів робочих органів різних машин і механізмів. Наприклад, у механізмі сіноворушилки, в тістомісильній машині і т.ін. Подібно будуються плани механізму (кінематичні схеми) інших важільних механізмів другого класу.
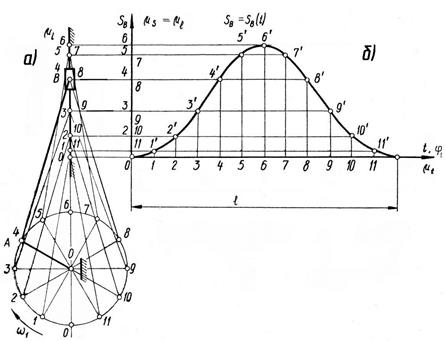
Рис. 2.2 При побудові планів механізмів, що мають триповодкові групи, також може бути використаний метод перетину двох траєкторій відносного руху (спосіб засічок). Цей спосіб в розглядуваному випадку ще називають способом удаваних положень або геометричних місць. Оскільки такий метод побудови є досить трудомістким, часто користуються шаблоном, який має форму базисної ланки. У випадку механізмів з вищими кінематичними парами (наприклад, кулачковими) доводиться враховувати, що профілі, або один з них, мають складні контури. Викреслювання послідовно декількох складних профілів є трудомісткою процедурою. У цих випадках доцільно застосувати метод обернення руху (метод інверсії). Суть його полягає в тому, що всьому механізмові (разом зі стояком) надають обертання з кутовою швидкістю, яка дорівнює за величиною, але протилежна за напрямом кутовій швидкості ланки, що має складний профіль (кулачок). Таким чином, рухому ланку зі складним контуром умовно роблять нерухомою; це дозволяє викреслювати її лише один раз. Відносне положення усіх ланок при цьому не змінюється. Приклад використання методу обернення руху буде розглянуто при вивченні кулачкових механізмів. При побудованих планах механізму неважко побудувати діаграми переміщення та отримати функції положень ланок механізму. Побудова діаграм переміщення. При дослідженні механізмів будують діаграми лінійних або, при коливальному русі ланки, кутових переміщень. Розглянемо побудову графіка sB(t) переміщень повзуна В кривошипно-повзунного механізму (рис. 2.3): - викреслюють 12 рівновіддалених за кутом повороту кривошипа планів механізму в масштабі - будують прямокутну систему координат. На осі абсцис відкладають відрізок l, що в масштабі - ділять відрізок l на 12 рівних частин. Від точок поділу 1, 2, 3, …11, паралельно осі ординат, відкладають відрізки 1-1/, 2-2/, 3-3/,..., які у вибраному масштабі З’єднавши одержані точки 0, 1/, 2/,…11/ плавною кривою, отримують діаграму переміщень повзуна, sB(t). Оскільки у задачах кінематики прийнято рух кривошипа рівномірним (за однакові проміжки часу він повертається на рівні кути), то можна вважати, що по осі абсцис відкладено і час t і кут повороту кривошипа
Рис. 2.3
2.4. Дослідження руху механізмів методом
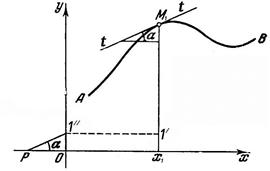
Якщо один з кінематичних параметрів механізму заданий у вигляді графіка чи таблиці значень, то в цьому випадку ефективними є графічні або чисельні методи диференціювання та інтегрування. Зазначимо, що при експериментальному дослідженні такі графіки викреслюються за допомогою самописних приладів. Задачі дослідження закономірності зміни переміщень, швидкостей і прискорень за повний цикл (період) руху досліджуваного механізму простіше розв’язуються за допомогою кінематичних діаграм (графіків руху). У практичних задачах ТММ кожна кінематична діаграма - це графічне зображення зміни одного з кінематичних параметрів ланки: переміщення, швидкості або прискорення як функції від часу або переміщення початкової ланки механізму (як функції від узагальненої координати). Наприклад, у випадку кривошипно-повзунного механізму для т. В повзуна (рис. 2.3) - це залежності sB(t), vB(t), aB(t) або sB( Розглядуваний метод дозволяє при заданій будь-якій з цих діаграм без значних зусиль отримати інші. Методом кінематичних діаграм часто користуються для наочності та виявлення можливих помилок при обчисленні. Переваги цього методу – простота у використанні й те, що результатом є наочне графічне зображення зміни одного з кінематичних параметрів руху від часу чи узагальненої координати. Варто мати на увазі, що методи графічного диференціювання та інтегрування не завжди можуть забезпечувати достатню точність результатів. Зазначимо, що до графічного диференціювання та інтегрування необхідно деколи звертатись навіть у тих випадках, коли кінематична функція задана аналітично, але не має достатньо простих формул для визначення похідної чи інтеграла. Графічне диференціювання. Метод дотичних. Графічне диференціювання використовується, коли є графік функції, а потрібно отримати графік її похідної. Так, наприклад, побудовано графік переміщення повзуна кривошипно-повзунного механізму (рис. 2.3), а необхідно побудувати графіки швидкості, прискорення. Розглянемо теоретичні основи графічного диференціювання. Використаємо відому залежність v = Нехай крива АВ (рис. 2.4) є графік деякої функції
Проведемо з точки 1// пряму, паралельну осі 0х, до перетину з ординатою т. М1. Ордината точки перетину 1/ і дає значення похідної Таким чином, для того, щоб побудувати графік похідної за графіком функції, поділимо ділянку АВ, заданої кривої, на деяке число частин. Далі, розглянутим методом, неважко знайти у точках поділу заданої кривої значення похідної - тобто точки диференціальної кривої. З’єднавши отримані точки плавною кривою, дістанемо графік функції
Рис. 2.4 Диференціювання методом дотичних має відносно низьку точність, оскільки досить складно проводити дотичні до кривих. Більшого поширення набув метод хорд, який відрізняється більшою точністю. Відмінність методу хорд полягає лише у тому, що значення похідної функції знаходять не у точках поділу кривої, а у точках, що ділять навпіл кожний з інтервалів (рис. 2.5, точки Зазначимо, що графік похідної буде точнішим при більшій кількості частин поділу кривої. Інтервали не обов’язково повинні бути рівними між собою; їх розмір вибирається з урахуванням того, щоб відповідні частини кривої менше відхилялись від прямої. Особливу увагу треба звернути на ділянки, де крива, яку диференціюють, має екстремуми; ділянки, у яких лінія значно звивається, слід розбивати на більше число частинок. Масштаби при графічному диференціюванні. Припустимо, що задана крива (рис. 2.5) зображає діаграму переміщень,
Рис. 2.5
Підставимо в (2.1) де
або в загальному випадку масштаб диференціальної кривої Послідовність диференціювання методом хорд. Задано діаграму переміщення кривошипно-повзунного механізму (рис. 2.6, а). Побудуємо діаграму швидкості: - на заданій кривій відмічають ряд точок 1/, 2/, 3/,…, які з’єднують хордами, тобто, замінюють задану криву ламаною лінією; - під діаграмою переміщень будуємо нову систему координат так, щоб осі абсцис були паралельними, а ординат - лежали на одній прямій (рис. 2.6, б). Ділимо вісь абсцис на такі ж інтервали, як і на попередньому графіку; - відкладаємо по осі абсцис ліворуч від початку системи координат довільний відрізок ОР1 - полюсну відстань;
Рис. 2.6. - з точки Р1 проводимо промені Р11//, Р12//, Р13//,..., паралельні до відповідних хорд кривої переміщень. Ці промені відтинають на осі ординат відрізки 01//, 02//, 03//,..., що пропорційні середній швидкості повзуна посередині відповідних інтервалів часу; - перенесемо точки 01//, 02//, 03//,..., на середини ординат відповідних ділянок. З’єднаємо точки 0, 1/, 2/,... плавною кривою. Отримана крива і буде діаграмою швидкості. Маючи діаграму швидкості, аналогічно методом хорд будують, за потреби, діаграму прискорень (рис. 2.6, в). Зазначимо, якщо діаграму переміщень задано у вигляді функції sB( Масштаби по осях ординат визначаються за формулами: – для діаграм швидкостей та прискорень – для діаграм аналогів швидкостей та прискорень де Н1, Н2 – відрізки в мм, взято з креслення (рис. 2.6). Масштаби по осях абсцис Порівнюючи графіки (рис. 2.6), можна встановити такий зв’язок між кінематичними діаграмами: - зростанню ординат кривої функції, що диференціюється, відповідають додатні значення ординат диференціальної кривої, а зменшенню – від’ємні значення; - екстремальним значенням функції (максимуми та мінімуми) відповідають нульові значення графіка похідної. - точкам перегину графіка функції відповідають екстремальні значення диференціальної кривої. Графічне інтегрування. Побудову графіків швидкості за заданим графіком прискорень та графіків переміщень - за графіком швидкостей виконують так званими прийомами графічного інтегрування. Існує декілька способів побудови інтегральної кривої: спосіб хорд, площ та інші. Розглянемо спосіб хорд. Інтегрування – це дія, обернена диференціюванню. Відповідно послідовність графічного інтегрування за способом хорд обернена послідовності диференціювання за цим способом. Нехай заданим є графік функції швидкості v(t). Знайдемо графік функції переміщення s(t). Рис. 3.1 На рис. 3.2, а зображена механічна характеристика асинхронного електродвигуна трифазного струму з короткозамкутим ротором – залежність крутного моменту від кутової швидкості ротора. Точка О діаграми визначає початковий пусковий момент Мо двигуна при нульовій кутовій швидкості ротора.Точка
де
 
а) б)
Рис. 3.2 Від швидкості залежать сили та моменти, що діють у таких робочих машинах як електрогенератори, вентилятори, відцентрові помпи і т.ін. (рис. 3.2, б). Відмітимо, що при зображенні механічних характеристик додержуються наступного правила знаків: силу і момент враховують додатними, якщо на розглядуваній ділянці шляху (лінійній чи кутовій) вони виконують додатну роботу. Характеристики сил, що з |
|||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-06-22; просмотров: 446; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.113 (0.018 с.) |


 n. Оскільки кількість кінематичних пар завжди ціле число, то кількість ланок в групі Ассура завжди парна; умові (1.4) відповідають лише такі співвідношення ланок і кінематичних пар, що входять у групу Ассура:
n. Оскільки кількість кінематичних пар завжди ціле число, то кількість ланок в групі Ассура завжди парна; умові (1.4) відповідають лише такі співвідношення ланок і кінематичних пар, що входять у групу Ассура: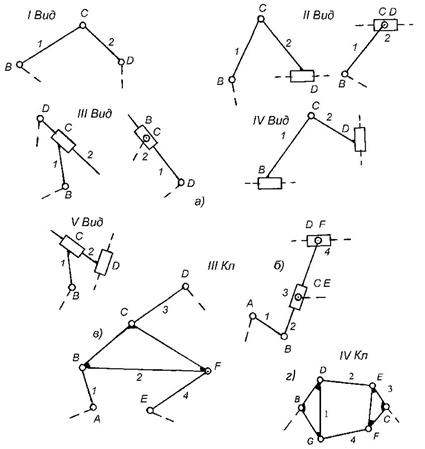
 Масштаб має розмірність: у чисельнику – розмірність зображуваної величини, а у знаменнику - мм (розмірність довжини відрізка на кресленні).
Масштаб має розмірність: у чисельнику – розмірність зображуваної величини, а у знаменнику - мм (розмірність довжини відрізка на кресленні). , де lAB - справжній розмір; AB - масштабний розмір на кресленні.
, де lAB - справжній розмір; AB - масштабний розмір на кресленні. ;
; отже
отже 
 );
); . В технічних задачах при кінематичному дослідженні механізмів закон руху початкової ланки беруть лінійним, тобто швидкість її руху вважають сталою (
. В технічних задачах при кінематичному дослідженні механізмів закон руху початкової ланки беруть лінійним, тобто швидкість її руху вважають сталою ( , дорівнює проектованій середній кутовій швидкості; в дійсності кривошип може обертатися нерівномірно, навіть із зупинками). Таким чином, за рівні проміжки часу кривошип повертається на рівні кути. При побудові 12 планів механізму коло, що описує т. А кривошипа, ділиться на 12 рівних частин, починаючи з початкового положення механізму. Для його знаходження з центра обертання кривошипа О1 досить зробити засічки радіусами R=АВ-О1А і R=О1А+АВ на траєкторії руху т. В - дузі α3-α3 (відповідно кривошип О1А накладатиметься на шатун АВ або витягуватиметься з ним в одну лінію). За початкове положення т. А візьмемо т. А0, яка відповідає початку робочого ходу (
, дорівнює проектованій середній кутовій швидкості; в дійсності кривошип може обертатися нерівномірно, навіть із зупинками). Таким чином, за рівні проміжки часу кривошип повертається на рівні кути. При побудові 12 планів механізму коло, що описує т. А кривошипа, ділиться на 12 рівних частин, починаючи з початкового положення механізму. Для його знаходження з центра обертання кривошипа О1 досить зробити засічки радіусами R=АВ-О1А і R=О1А+АВ на траєкторії руху т. В - дузі α3-α3 (відповідно кривошип О1А накладатиметься на шатун АВ або витягуватиметься з ним в одну лінію). За початкове положення т. А візьмемо т. А0, яка відповідає початку робочого ходу ( ), при заданому напрямі обертання кривошипа. Зрозуміло, що т.
), при заданому напрямі обертання кривошипа. Зрозуміло, що т.  не завжди збігається з точками поділу траєкторії т. А на рівні частини, послідовні положення якої позначені А0, А1, А2, …, 11.
не завжди збігається з точками поділу траєкторії т. А на рівні частини, послідовні положення якої позначені А0, А1, А2, …, 11. кола радіуса ВС. З іншого боку, внаслідок незмінності довжини шатуна АВ точка В може описати навколо т. А тільки дугу радіуса АВ. Таким чином, геометричним місцем можливих положень центра шарніра В є дві дуги кіл радіусів АВ та ВС. Точка перетину цих дуг і дасть дійсне положення т. В для конкретного положення кривошипа.
кола радіуса ВС. З іншого боку, внаслідок незмінності довжини шатуна АВ точка В може описати навколо т. А тільки дугу радіуса АВ. Таким чином, геометричним місцем можливих положень центра шарніра В є дві дуги кіл радіусів АВ та ВС. Точка перетину цих дуг і дасть дійсне положення т. В для конкретного положення кривошипа.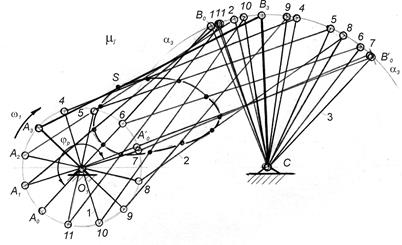

 ; за початок відліку прийнято нижнє крайнє положення повзуна;
; за початок відліку прийнято нижнє крайнє положення повзуна; зображає період Т одного оберту кривошипа, тобто
зображає період Т одного оберту кривошипа, тобто  ,
,  ;
; зображають переміщення повзуна від крайнього нижнього положення. Якщо переміщення відкладаються безпосередньо з планів механізму (як у прикладі на рис. 2.3), то
зображають переміщення повзуна від крайнього нижнього положення. Якщо переміщення відкладаються безпосередньо з планів механізму (як у прикладі на рис. 2.3), то  .
. . Тобто графік sB(t) одночасно є графіком sB(j1), який представляє собою функцію положення механізму. Масштаб
. Тобто графік sB(t) одночасно є графіком sB(j1), який представляє собою функцію положення механізму. Масштаб  цього графіка буде:
цього графіка буде:  , або
, або  .
.
 ,
,  або
або 
 ,
,  .
. . Геометрично, похідна функції визначається тангенсом кута нахилу дотичної до графіка функції, проведеної у точці, абсциса якої є точка диференціювання,
. Геометрично, похідна функції визначається тангенсом кута нахилу дотичної до графіка функції, проведеної у точці, абсциса якої є точка диференціювання, 
 . Проведемо дотичну до графіка у т. М1, що відповідає заданій абсцисі
. Проведемо дотичну до графіка у т. М1, що відповідає заданій абсцисі  .Відкладемо на осі абсцис вліво від початку прямокутної системи координат відрізок ОР (полюсну відстань), що дорівнює одиниці масштабу. З точки Р (полюса) проведемо пряму, паралельну дотичній до перетину з віссю ординат. Відрізок 01// буде виражати значення похідної
.Відкладемо на осі абсцис вліво від початку прямокутної системи координат відрізок ОР (полюсну відстань), що дорівнює одиниці масштабу. З точки Р (полюса) проведемо пряму, паралельну дотичній до перетину з віссю ординат. Відрізок 01// буде виражати значення похідної  , при заданому значенні
, при заданому значенні 
 .
.
 ). Перевагою є те, що при цьому замість дотичних беруться, як правило, з досить великою точністю, хорди, що з’єднують кінцеві точки кожного інтервалу. Метод ґрунтується на відомій теоремі про скінчений приріст функції: якщо функція, що задана графічно, та її перша похідна неперервні, то в будь-якому інтервалі хорда, що стягує дану дугу, паралельна дотичній до кривої, принаймні, в одній точці, яка лежить у середині цього інтервалу.
). Перевагою є те, що при цьому замість дотичних беруться, як правило, з досить великою точністю, хорди, що з’єднують кінцеві точки кожного інтервалу. Метод ґрунтується на відомій теоремі про скінчений приріст функції: якщо функція, що задана графічно, та її перша похідна неперервні, то в будь-якому інтервалі хорда, що стягує дану дугу, паралельна дотичній до кривої, принаймні, в одній точці, яка лежить у середині цього інтервалу. . Знаючи масштаб
. Знаючи масштаб  часу, для будь-якої точки М(х,у) кривої можна записати
часу, для будь-якої точки М(х,у) кривої можна записати  ,
,  . Тоді
. Тоді . (2.1)
. (2.1)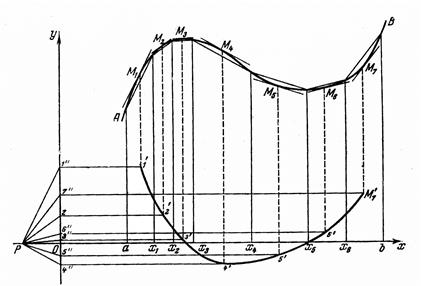
 та
та  ,
, - відрізки 01//, 02//, 03//,..., які зображають в масштабі
- відрізки 01//, 02//, 03//,..., які зображають в масштабі  швидкості у відповідних положеннях механізму; Н – полюсна відстань ОР. Тоді масштаб графіка швидкості
швидкості у відповідних положеннях механізму; Н – полюсна відстань ОР. Тоді масштаб графіка швидкості  ,
,
 .
.
 та прискорення
та прискорення  (аналогів швидкості та прискорення).
(аналогів швидкості та прискорення). ,
,  ,
, ,
,  ,
, – визначає максимальний перехідний момент
– визначає максимальний перехідний момент  та мінімальну допустиму кутову швидкість.При деякому значенні кутової швидкості
та мінімальну допустиму кутову швидкість.При деякому значенні кутової швидкості  , що відповідає номінальному моменту Мн двигуна і номінальній швидкості
, що відповідає номінальному моменту Мн двигуна і номінальній швидкості  , двигун розвиває максимальну потужність. Кутова швидкість, при якій Мд = 0, називається синхронною
, двигун розвиває максимальну потужність. Кутова швидкість, при якій Мд = 0, називається синхронною  ; з цією швидкістю ротор обертається при марноході. Робочою частиною характеристики є ділянка аb. Ця частина характеристики є стійкою, оскільки на цій ділянці двигун має здатність до саморегулювання: при збільшенні навантаження швидкість двигуна зменшується, а електромагнітний обертовий момент зростає, і навпаки. Стійка ділянка характеристики з достатньою точністю може бути апроксимована лінійною залежністю
; з цією швидкістю ротор обертається при марноході. Робочою частиною характеристики є ділянка аb. Ця частина характеристики є стійкою, оскільки на цій ділянці двигун має здатність до саморегулювання: при збільшенні навантаження швидкість двигуна зменшується, а електромагнітний обертовий момент зростає, і навпаки. Стійка ділянка характеристики з достатньою точністю може бути апроксимована лінійною залежністю ,
, ,
,  .
.


