Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Электромагнитное поле» и алгоритмы поведения свободных зарядов.Содержание книги
Поиск на нашем сайте
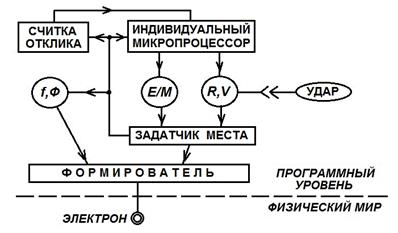
Свободные заряженные частицы откликаются на электромагнитные воздействия изменениями состояния своего движения. Так, откликом на электрические токи в антенне, «излучающей» радиоволну, являются соответствующие подвижки свободных заряженных частиц в окружающем пространстве. Создаётся полное впечатление того, что заряды действуют друг на друга, и что причина этого действия находится в них самих. В современной физике принято считать, что это действие на расстоянии происходит при участии посредника, называемого «электромагнитное поле» - которому приписан статус физической реальности. Родоначальником концепции электромагнитного поля считается Максвелл, а знаменитые уравнения Максвелла считаются уравнениями электромагнитного поля. Но вот что писал Максвелл в своём фундаментальном «Трактате»: «Электрическое поле – это часть пространства в окрестности наэлектризованных тел, рассматриваемая с точки зрения электрических явлений. Она может быть занята воздухом или другими телами или это может быть так называемый вакуум, из которого мы удалили всякое вещество…» [М5]. Где тут речь о физической реальности? Участок пространства – и не более того! Да и в уравнениях Максвелла фигурируют не «компоненты поля», а абстрактные вспомогательные величины, формально введённые для возможности расчёта электромагнитных явлений. Господа теоретики, нехорошо клеветать на великих и «перекладывать со своих больных голов на их здоровые»! Впрочем, без физического посредника, поведение электрических зарядов выглядит совершенно мистическим – если не признавать никакой иной реальности, кроме физической. Поэтому, здесь придётся сделать выбор: либо продолжать валять дурака в рамках чисто физических представлений, либо признать-таки, что заряженные частицы охвачены программным управлением, которое и определяет их поведение. Принцип этого управления изложен в 3.11. Свободные частицы отнюдь не следуют закону Кулона: не притягиваются друг к другу, если они имеют разноимённые заряды, и не отталкиваются друг от друга, если они имеют одноимённые заряды. Для каждой свободной частицы, имеющей идентификатор элементарного электрического заряда (5.1), реакция на окружающие заряды заключается в том, что управляющий ей индивидуальный микропроцессор (см. ниже) последовательно производит приращения её вектора скорости – в соответствии с положениями и движениями окружающих зарядов. Эти приращения энергетически обеспечиваются не каким-либо внешним источником энергии, а автономными перераспределениями энергий (1.5) самой частицы. Мы полагаем, что индивидуальный микропроцессор, управляющий кинематикой заряженной частицы, не занимается мониторингом окружающих зарядов и расчётами текущих поправок вектора скорости управляемой частицы. Индивидуальный микропроцессор использует готовые, динамически обновляемые, параметры кинематического отклика частицы, берущиеся в реальном времени для той точки координатного поля (2.2), в которой частица находится. Это возможно благодаря работе Большого процессора, который рассчитывает текущие параметры кинематического отклика свободного заряда для всех точек координатного поля, и, таким образом, информационно обеспечивает кинематические отклики всех свободных заряженных частиц в этом координатном поле. При этом, для Большого процессора, делать расчёты для каждой точки координатного поля на основе непрерывного мониторинга положений и скоростей всех зарядов в координатном поле – означает чудовищный перерасход вычислительных мощностей, причём, перерасход неоправданный. Нам представляется, что организовано специфическое прореживание входной информации для Большого процессора – о положениях и скоростях зарядов. Каждый элементарный заряд «заявляет» о своём положении и своей скорости не для всех точек прилегающего координатного поля сразу. С некоторой периодичностью, от каждого элементарного заряда распространяются «волны деклараций», имеющие чисто информационную, программную природу. В проекции на координатное поле, волна деклараций представляет собой тонкий сферический слой, радиус которого увеличивается со скоростью света. Только для тех точек координатного поля, которых, на текущий момент, накрывает этот слой, Большой процессор обновляет вклады, в расчётные отклики, от того заряда, от которого расходится данная волна деклараций – несущая информацию о положении и скорости этого заряда на момент выхода этой волны. После каждого такого обновления расчётного отклика в некоторой точке координатного поля, этот отклик реализуется для заряженных частиц, которые оказываются в этой точке – пока не придёт следующая волна деклараций, и не произойдёт следующее обновление расчётного отклика. В реальной ситуации, каждую точку координатного поля накрывают волны деклараций не от одного элементарного заряда, а от огромного количества зарядов – так что обновления суммарного расчётного отклика в этой точке производятся, практически, безостановочно. Зато для свободной заряженной частицы, попадающей в эту точку, параметры кинематического отклика на окружающие заряды всегда готовы в реальном времени. Что касается частоты повторяемости волн деклараций, то, из соображений оперативной реакции на очень близкие заряды, можно допустить, что, на масштабах нанометров, эта частота не на много порядков меньше электронной частоты и составляет, по-видимому, ~1018 Гц – но из того факта, что радиоволны распространяются на колоссальные расстояния, можно заключить, что эта частота не может стать меньше чем ~1012 Гц. Следует добавить, что, при обновлениях суммарного расчётного отклика в некоторой точке координатного поля, Большой процессор учитывает вклад от каждого заряда, внося поправку на дальность этого заряда от данной точки – согласно известному закону обратных квадратов. Чем дальше заряд, тем слабее его вклад в суммарный расчётный отклик. Таковы, на наш взгляд, механизмы управления свободными заряженными частицами. Что же касается алгоритмов этого управления, то движение свободных заряженных частиц управляется таким образом, чтобы это движение, по возможности, устраняло статические и динамические отклонения от равновесного распределения зарядов обоих знаков в пространстве. При равновесном распределении, во-первых, отсутствует разделение зарядов, т.е. везде одинакова объёмная плотность положительного и отрицательного электричества (хотя значение этой плотности может изменяться от места к месту). Поэтому, при наличии рядом разделения зарядов, свободные заряженные частицы направляются так, чтобы, по возможности, устранялись эти разделения – так действуют «электрические силы», дающие стойкую иллюзию того, что разноимённые заряды притягиваются друг к другу, а одноимённые – отталкиваются друг от друга. Во-вторых, при равновесном распределении зарядов, отсутствуют их коллективные упорядоченные движения, т.е. отсутствуют электрические токи. Поэтому, при наличии рядом электрического тока, свободные заряженные частицы направляются так, чтобы, по возможности, их подвижками компенсировался этот ток. Так действуют «магнитные силы», отвечающие и за электромагнитную индукцию – которая на практике проявляется именно как возникновение компенсирующих токов. В частности, катушка индуктивности обладает большой «ЭДС самоиндукции» благодаря геометрии с близким друг от друга расположением соседних витков: возмущение тока, добежавшее до одного витка, вызывает компенсирующие противотоки в соседних витках. Вышеизложенная модель даёт весьма адекватную картину того, что в физике называется «взаимодействиями зарядов на расстоянии». Если волны деклараций распространяются со скоростью света, то тривиально объясняется запаздывание реакции одних зарядов на подвижки других зарядов. Фактически, наша модель объясняет, как работает программное обеспечение распространения радиоволн – при том, что от «электромагнитного поля» ничего не остаётся на физическом уровне реальности, и, если использовать термин «электромагнитное поле», то следует понимать, что это поле имеет чисто информационную, программную природу. Поскольку волны деклараций работают только в окружающих заряд-источник точках координатного поля, то легко и изящно устраняется проблема, до сих пор не нашедшая разрешения в рамках представлений о поле, как физической реальности: «если все заряды создают одно общее поле, а поле действует на все заряды, то каждый заряд не может не действовать на самого себя» [Ф2] – а отсюда вытекают бесконечные энергии взаимодействия зарядов с самими собой. Теперь вкратце опишем логику работы индивидуального программного пакета электрона – с откликом на окружающие заряды (см. схематический Рис.5.3).
Рис.5.3
ФОРМИРОВАТЕЛЬ непосредственно формирует электрон в физическом мире, т.е. производит циклическую смену двух состояний на электронной частоте (5.1) в том месте координатного поля (2.2), которое, на текущий момент, занимает данный электрон. Для этого ФОРМИРОВАТЕЛЮ требуются два потока данных. Во-первых, директивы о месте в координатном поле, в котором следует формировать электрон, идут ФОРМИРОВАТЕЛЮ от ЗАДАТЧИКА МЕСТА – который обеспечивает и перемещение электрона, обновляя свои директивы. Во-вторых, по каналу f,Ф ФОРМИРОВАТЕЛЮ идут директивы о частоте-фазе смен состояний – частота зависит от местоположения, поскольку она зависит от гравитационного потенциала (3.7), а фаза соответствует знаку элементарного заряда электрона (5.1). ЗАДАТЧИК МЕСТА имеет два входных управляющих канала. Канал R, V обеспечивает, если можно так выразиться, чисто механическое движение электрона. Если у коллектива электронов ЗАДАТЧИКИ МЕСТА управлялись бы только по каналам R, V, то электроны вели бы себя как шарики, способные испытывать упругие соударения – и каждый электрон сохранял бы вектор своей скорости постоянным до следующего соударения. По каналу E/ M, в эту чисто механическую кинематику вносятся коррективы, обеспечивающие участие электрона в электромагнитных взаимодействиях. Для текущего положения электрона, подпрограммой СЧИТКА ОТКЛИКА производится считка рассчитанных Большим процессором (см. выше) параметров кинематического отклика на окружающие заряды, и ИНДИВИДУАЛЬНЫЙ МИКРОПРОЦЕССОР периодически выдаёт директивы на приращения вектора скорости электрона. Очередное приращение вектора скорости по каналу E/ M приплюсовывается к предыдущему значению вектора скорости, которое поддерживалось каналом R, V. После этого канал R, V поддерживает обновлённое значение вектора скорости, до следующего обновления – т.е. до очередной директивы по каналу E/ M или до «чисто механического» возмущения по каналу R, V. Вот так, в общих чертах, управляется свободный электрон в штатном режиме. Нештатный, «аварийный» режим управления свободным электроном рассмотрен ниже, в 5.4.
|
||||
|
|
Последнее изменение этой страницы: 2021-04-04; просмотров: 111; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.18.59 (0.009 с.) |