Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Тические описания синхронных и асинхронных машин. элементовСодержание книги
Поиск на нашем сайте сети н узлов нагрузки. Упрощенное уравнение движения синхронной машины (генера тора, компенсатора) может использоваться в виде (11.4), где элект рическая (внутренняя) мощность одиночной машины Р = Е (t) / (t) cos <р (t). (12.1) Здесь Е (t) - лннеf1ная э. д. с. машины; / (t) -ток в обмотке ее статора. Для электриче ской системы, которая содержит 11е одну машину, при определении внутренней мощности необходимо учитывать влия ние других машин через их э. д. с. и взаимные углы положения ро- 1·оров б,1 = б1 - б1. Уравнение внутренней мощно= i-й синхронной машины, которая работает параллельно с 11 - 1 другими син Хронными машинами, имеет вид п Мате:матиt1еское олисание СЭС для иссJ1едования их устойчи вости основывается на теории дифференциальных уравнений. Прн этом анализ устойчивости режимов реальных еэс сводится к иссле Р, = E,y"sinaa + E.,E.;Y11sin(бц- а11). i=l /# (12.2) дованию устойчивости решений систем дифференциальных урав Нений. В общем виде С.ЭС описываются системами дифференциальных урав1Jе1шй nысокого порядка. Дпя практических расчетов порядок системы уравнений обычно не превышает шести. При руч11ом счете можоо анализироват ь JJfJ деснт-и уравнений, а при ислользованин ЭВМ решаются системы уравнений более высоких порядков. Для оценки устойч иоости применяют J1инеаризацию систем диф· фсренциальных уравнений н нониженне их оорядка с целью п0J1у чення простых универсальных методон и алгоритмов расчета. В ли нейных системах уравнений н системах с несущественной нелиней ностью устой чивость анализируется методом малых колебан ий. Дт1 больших возмущений при а11ализе устойчивости используется вто рой метод Ляпунова или численное интегрирование. Понижение порядка систем уравнений, описыnающих исследуе мые процессы, может быть достигнуто их упрощением:
где Е.,, Eq1 -модули э. д. с. синхронных машин: Уи - модуль собственной эквивалентной проводимости; У<; - модуль взаимной sквивалентной проводимости между источниками; аи = n/2 - - arctg (xulr 11) и а11 = n/2 -arctg (xl/lrlf) - углы, характеризую щие соотношения между составляющими полных С твенных и взаим ных сопро11шле11ий электрической сети. Системы электроснабжения предприятий обычно подключаются к шинам центров питания, находящимся оод напряжением U. Урав Нения внутренни1' активной и реактив 11оi'1 мощностей сипхропиоrо Генератора в этом сд учае имеют вид Р = E ysina +Epy sin(б-a); (12.3) Q = Е усоsа-Ерусо,(б-а), (12.4) где у -модуль проводимости сети между источником и шинами ээс. Эти же мощности на шинах ЭЭС описываются выражениими их рассмотрением; заменой групп источников или двигателей одним эквивалентным; предеrавJJением нагрузки обобщенными характеристиками; выделением существенных факторов в протекающих процессах ' Р' =-U•ysina + Epysin(б +а); (( = -U•ycosa + Epycos(f> +а).
02.5) (12.6) и пренебрежением второстепенными факторами и малыми парамет рами; линеаризацией характеристик ЭJJементов СЭС; разделением сложной системы на простые оодсистемы, которые можно рассматривать независимо. Трудоемкост ь решения задачи устойчивости зависит также от уровня аналитиче ского описания математических моделей основных элементов СЭС. Для решения задач устойчиво сти применительно к СЭС промышленных предприятий приемлемы упрощенные матема- Синхронный генератор при частоте вращею1я, отличноii от Урасненне вращающего момента турбины можно составить на основании стати ческих ха.рактернстнк Мт = 'Р (ro, µ), где µ - •е· лень открытия регулирующего кла11ана энергоносителя турбины. Нелинейно спадающие характеристики Мт зависят от угловой ско рости турбины и степени открытия регулирующего клапана. При
Sкр = Sном (mmax + т;.., -1),
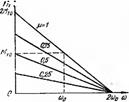
(12.14t ством прямых(рис. 12. 1): Мт = µ[M"-t],. (ro -ro0)), (12.7) где Мт0, 000 - параметры, соответ ствующие ооминальному режиму; Чт - коэффнциеm саморегулиро вани<1 турбины. Уравнение движения синхрон а mma.x. = Mm:u: /Мно." - кратность максимального момента. В приближенных расчетах устойчивости электромагют1ые пе реходные процессы в асинхронном двигателе можно не учитывать,
действительными для установившегося режима. Последние приме· 11итель110 к упрощенной схеме зимещення двигате.r1я (рис. 12.2, а} имеют вид
Рис. 12.1. Идеализированные ха ного двигателя при Е' = const Q = U r,si(r; +x;s); 1 (12.15i 2 2 Рактернстнки вращающего момента Турбины совпадает по составляющим с урав нением (11.4) T,d2б/dt2 + М., = М, (12.8) Q = Px,sir, + U2 (1 - а+ aU')lxµ.
где Ммх - момент сопротивления рабочего механизма, и можеr нс пользооаться в расчетах кратковременных (до одного цикла кача 2
синхронных двигателей, которые электрически удалены от места а возмущения, сохраняют устойчивость и слабо влпяют на режим других маши н. Расчетная э. д. с. Е' включена за переходным сопро тполением двигателя х и определяется выражением [271 Е' = Jf U• - 2U'Qx + (Р' +([') x '!U, (12.9) где активная и реактивна< мощности двигателя ра эны: Р = E'U sinб/x; Q = (U2 -E'U соsб)/х. (12.JO) При расчете переходных нроцессов большой длительности сле дует иметь в виду, что переходные режимы генераторов характе ризуются ма11ыми скольжениями, тогда как скольжение синхронных двигателей может изменяться от ну.i1я до единицы. В этом случае нужно использовать уравне11ие движения сш1хронноrо двигателя T,d2бidt2 + p,,dб/dt = М - М "" (12.11) где p,jlб/dt - JJJt11еаризованный асинхронный момещ; Ра - коЭ<j, :рициент демпфирования, определяемый по линейной части асин хронной характеристнки синхронной машины как pd = dM!ds, а s = (ro0 - ro)/ro0 = dб/(ro.,dl) -скольжение двигателя. Электромеханический переходный процесс дл я асинхронного
|
||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 261; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.217.246.20 (0.008 с.) |