Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Кинематические схемы якорно-швартовных механизмовСодержание книги
Поиск на нашем сайте
Брашпиль.
где: 1,10 – турачки; 2,9 – ленточные тормоза цепных звездочек; 3,8 – цепные звездочки; 4,7 – кулачковые муфты; 5 – червячно-цилиндрический редуктор; 6 – грузовой вал; 11,15 – ручные приводы тормозов цепных звездочек; 12 – муфта; 13 – электродвигатель; 14 – дисковый тормоз.
Турачки (швартовные барабаны) сидят на грузовом валу жестко и вращаются при работающем двигателе. Цепные звездочки насажены свободно, кулачковые муфты закреплены на шлицах и могут перемещаться вдоль вала при помощи ручного механизма включения цепных звездочек, чем обеспечивается работа с одним, двумя якорями или осуществление только швартовных операций. Электродвигатель снабжен пристроенным дисковым тормозом. Для ручного привода на редукторе устанавливается колонка с рукояткой (на рисунке не показана), которая может быть съемной.
Шпиль. Схема двухпалубного якорно-швартовного шпиля имеет вид:
где: 1 – маховик включения кулачковой муфты; 2 – турачка; 3 – цепная звездочка; 4 – ленточный тормоз цепной звездочки; 5 – маховик привода тормоза цепной звездочки; 6 – псевдопланетарная передача редуктора; 7 – электродвигатель; 8 – дисковый тормоз; 9 – червячная передача редуктора;
На палубе размещается головка шпиля, состоящая из швартовного барабана (турачки) и цепной звездочки, вращающихся вокруг неподвижного палубного стакана. Барабан и звездочка соединяются между собой кулачковой муфтой, включаемой винтовой парой с помощью маховика1. Привод шпиля, состоящий из электродвигателя и передач червячной и псевдопланетарной, крепится снизу (под палубой) к палубному стакану. При работе электродвигателя турачка всегда вращается, а звездочка вращается только тогда, когда включена кулачковая муфта. Цепная звездочка снабжена ленточным тормозом, управляемым маховиком 5, встроенным в колонку, размещенную на палубе рядом со шпилем.
Швартовная лебедка. Предназначены в основном для швартовных операций. Барабан лебедки одновременно обеспечивает хранение швартовного каната. На маломерных судах получили применение якорно-швартовные лебедки. В некоторых случаях, учитывая технологию комплектации, такие устройства называют швартовными лебедками с якорной приставкой. Упрощенная схема без канатоукладчика имеет вид:
где: 1,8 – кулачковые соединительные муфты; 2,7 – ленточные тормоза; 3 – швартовный барабан; 4 – грузовой вал; 5 – редуктор; 6 – цепная звездочка; 9 – турачка; 10 – электродвигатель; 11 – дисковый тормоз.
На грузовом валу 3 трехступенчатого редуктора 13 свободно размещен швартовный барабан 2 и цепная звездочка 12, а на шпонке – турачка 10. звездочка служит для выбирания якоря, швартовка производится с помощью каната, наматываемого на барабан; турачка предназначена для выполнения вспомогательных операций. Барабан и звездочка снабжены ленточными тормозами 5 и 9, а для сцепления с грузовым валом у них предусмотрены кулачковые соединительные муфты 4 и 11. На морских судах нашли применение автоматические швартовные лебедки (АШЛ). Они предназначены для поддержания заданного усилия на швартове, которое может меняться в широких пределах при отливе и приливе, при разгрузке и загрузке судна. Электрические автоматические швартовные лебедки выполняются с взвешивающим устройством (измерителем натяжения) и без него. В первом случае двигатель работает в повторно-кратковременном режиме, во втором двигатель стоит под током и уравновешивает момент, создаваемый натяжением троса на барабане. Примером может служить система Г-Д. В настоящее время последние практически не применяются. Рассмотрим схему автоматической лебёдки с измерителем натяжения, выполненным на планетарной передаче.
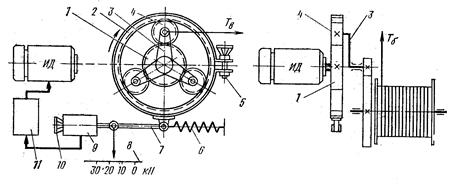
Рис.2.4 Кинематическая схема АШЛ.
Основным элементом измерительной системы является планетарная передача в силовой цепи редуктора между двигателем и грузовым барабаном. Солнечное колесо передачи 1 связано с исполнительным двигателем ИД. Водило 3 с закреплёнными на нём сателлитами 4 передаёт вращение на грузовой барабан. При заторможенном двигателе усилие на барабане через водило и сателлиты передаётся на венечную шестерню 2, смещение которой вызывает растяжение пружины динамометра 6. В статическом состоянии пружина уравновешивает силу Тв, приложенную к водилу, эквивалентную натяжению швартового каната. Растяжение пружины фиксируется указателем 8 и через шатун 7 передаётся на датчик тяговой силы 9. Датчик содержит контактные элементы управления магнитной станцией 11. Установка натяжения производится маховиком 10. Отклонение действительного усилия от заданного вызывает дополнительное перемещение штока датчика натяжения, коммутацию его управляющих элементов и включение ИД в направлении, зависящем от знака отклонения натяжения.
При ручном управлении лебёдкой магнитная станция переключается на командоаппарат и взвешивающее устройство превращается в простой измеритель натяжения. Динамометрическая система имеет ленточный стопор 5. Требования Российского речного Регистра к приводу якорно-швартовных механизмов 1) Мощность привода якорно-швартовного механизма должна обеспечивать подтягивание судна к якорю, отрыв и подъем любого из якорей со скоростью не менее 0,12 м/с при номинальном тяговом усилии на звездочке F1, Н
где m – коэффициент прочности, принимаемый равным 1,0 для цепей с распорками; 0,9 – для цепей без распорок. 2) Привод должен обеспечивать выбирание якорной цепи с указанной скоростью и тяговым усилием F1 в течение не менее 30 минут без перерыва, а также спуск одного якоря на расчетную глубину якорной стоянки. 3) Пусковой момент привода якорного механизма должен создавать тяговое усилие на звездочке при неподвижной якорной цепи не менее F1 4) Привод якорного механизма должен обеспечивать одновременный подъем свободно висящих якорей с половины расчетной глубины якорной стоянки. 5) При подходе якоря к клюзу привод должен обеспечивать скорость выбирания цепи не более 0,12 м/с. 6) Привод швартовного механизма должен обеспечивать непрерывное выбирание швартовного каната при номинальном тяговом усилии с номинальной скоростью не менее 30 минут. 7) Скорость выбирания швартовного каната, как правило, не должна превышать 0,3 м/с при номинальном тяговом усилии. Кроме того должна быть обеспечена возможность выбирания каната со скоростью не более 0,15 м/с. 8) Привод швартовного механизма должен быть способен создавать усилие не менее двухкратного номинального тягового усилия в течение 15 секунд.
Требования к электрическим приводам якорных и швартовных механизмов
1) Асинхронные электродвигатели с короткозамкнутым ротором после 30 минут работы должны выдерживать стоянку под током в течение 30 секунд для якорных механизмов и 15 секунд для швартовных при номинальном напряжении. 2) Асинхронные двигатели с фазным ротором и двигатели постоянного тока при этом должны иметь момент стоянки не менее 200% при номинальном напряжении. 3) Схема управления электроприводом должна обеспечивать заданные скорости, защиту от токов короткого замыкания, от перегрузки, минимальную защиту и нулевую блокировку. 4) У якорно-швартовных шпилей и лебедок на ступенях скоростей, предназначенных только для швартовных операций и не предусмотренных для подъема якорей, должна быть предусмотрена соответствующая защита от перегрузки электродвигателя. 5) В аварийных случаях схема управления должна позволять блокировку защиты от перегрузки.
Требования к тормозам
1) Якорные механизмы с электроприводом должны иметь автоматические тормоза. 2) Автоматический тормоз должен обеспечивать тормозной момент, соответствующий усилию на звездочке не менее 2F1. 3) Каждая цепная звездочка должна иметь тормоз, тормозной момент которого должен соответствовать усилию в цепи на звездочке не менее 0,3 Fпр (Fпр – пробная нагрузка якорной цепи)
4) Швартовный механизм должен быть оборудован автоматическим нормально замкнутым тормозом. Тормоз должен удерживать барабан в неподвижном состоянии при действии в канате статического усилия не менее 1,5 номинального тягового усилия швартовного механизма.
Дополнение. На самоходных судах длиной более 60 м., несамоходных толкаемых судах, предназначенных для перевозки воспламеняющихся жидкостей, и толкачах, тормоза механизмов подъема якорей должны быть оборудованы устройством дистанционной отдачи якоря, исключающим самопроизвольную отдачу якоря. Устройства дистанционной отдачи якорей должны обеспечивать: – управление из рулевой рубки отдачей правого носового, а для толкачей и кормового якоря; – возможность остановки из рулевой рубки якорной цепи при любой вытравленной ее длине; – продолжительность отдачи якоря не более 15 с., с момента включения дистанционного управления отдачей якоря.
Типы электроприводов ЯШМ
Для якорно-швартовных механизмов применяют три основные группы электроприводов: первая – с двигателями постоянного тока, питающимися от сети; вторая – с двигателями постоянного тока, питающимися от автономных преобразователей; третья – с двигателями переменного тока, питающимися от сети. Якорно-швартовный привод имеет две особенности, определяющие конкретные решения при выборе электродвигателей и системы управления. Во-первых, среднегодовая наработка, как правило, не превышает 50-80 ч. Поэтому минимизация капитальных затрат при сохранении необходимого технического уровня привода и его надежности имеет первостепенное значение. Наиболее простые системы существенно снижают и эксплуатационные затраты. Во-вторых, якорный привод является одним из мощных судовых приводов, непосредственно влияющих на нагрузку судовой электростанции. С этой точки зрения желательно, чтобы используемые электродвигатели обладали мягкой механической характеристикой, приближающейся к гиперболе постоянства мощности Р = М∙ω = const. Такие характеристики при возрастании нагрузки обеспечивают снижение скорости выбирания якорной цепи. В динамических режимах происходит замедление протекания переходных процессов. Существенно снижается ударная нагрузка на кинематический механизм и якорную цепь. Таким образом, наилучшими тяговыми качествами применительно к якорно-швартовным механизмам обладает электродвигатель постоянного тока со смешанным возбуждением. Отечественной промышленностью разработана и выпускается специальная серия электродвигателей типа ДПМ для судового привода, работающего в кратковременном и повторно-кратковременном режимах работы, в диапазоне мощностей от 2 до 95 кВт. Серия имеет 10 типоразмеров, каждый из которых может иметь исполнение с пристроенным дисковым тормозом и без него. Имеют повышенную механическую прочность, степень защиты IP56, два основных исполнения: быстроходные и тихоходные. Максимально допустимая частота вращения для обоих исполнений одинаковая. Быстроходные электродвигатели допускают до 300 включений в час, тихоходные до 500.
Управление осуществляется с помощью силовых кулачковых контроллеров или магнитных станций. Параллельная обмотка возбуждения ограничивает частоту вращения электродвигателя при малых нагрузках и обеспечивает режим динамического торможения, создает условия для спуска якоря в режиме рекуперативного торможения. Необходимую характеристику для втягивания якоря в клюз получают включением резисторов последовательно и параллельно якорю, повышенную частоту вращения получают ослаблением магнитного поля двигателя. Из второй группы электроприводов широкое применение имела система Г-Д. На речных судах не используется. Получение желательных механических характеристик электроприводов на переменном токе более затруднительно. Первоначально решение по удовлетворению требований Регистра нашли в создании асинхронных двигателей с переключаемыми полюсами, затем были разработаны двух- и трехобмоточные многоскоростные короткозамкнутые асинхронные двигатели с повышенным активным сопротивлением обмоток ротора серии МАП. Отечественная промышленность выпускает двигатели этой серии двухскоростные на мощность 2-30 кВт и трехскоростные на мощность 11-60 кВт. Особенностью конструкции активной части двигателей являются относительно малый диаметр ротора при большой глубине пазов статора. Такая конструкция связана с размещением до трех отдельных обмоток на статоре и необходимостью обеспечить минимальный момент инерции ротора. Двигатели имеют внутреннее соединение обмоток, переключение со звезды на треугольник невозможно. У двухскоростного электродвигателя основные операции по снятию с якоря и швартовке выполняют при работе на быстроходной обмотке, тихоходная обмотка включается при втягивании якоря в клюз и для безопасной швартовки. У трехскоростного двигателя все основные операции производятся на средней скорости; тихоходная служит для втягивания якоря в клюз и безопасной швартовки; быстроходная используется при выбирании свободных швартовных канатов. Электродвигатели имеют степень защищенности IP56, изготавливаются с пристроенными дисковыми тормозами и без них. Управление двигателями серии МАП осуществляется с помощью силовых кулачковых контроллеров или релейно-контакторных станций (магнитных контроллеров).
|
|||||||||||
|
|
Последнее изменение этой страницы: 2016-12-30; просмотров: 1629; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 52.15.164.56 (0.012 с.) |