Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Емкостные и индуктивные датчики.Содержание книги
Поиск на нашем сайте Емкостные датчики используют принцип преобразования линейных или угловых перемещений в изменении емкости конденсатора. Емкость любого конденсатора
где ε 0 – диэлектрическая проницаемость вакуума (ε0=8,85·10-12 Ф/м); ε – диэлектрическая проницаемость среды между пластинами (между обкладками конденсатора); S – площадь обкладок конденсатора (м2); δ – зазор между пластинами (м). Относительная чувствительность плоского емкостного датчика с переменным зазором
емкость датчика угловых перемещений
где S – площадь перекрытия обкладок при α =0; α – угол поворота пластин (обкладок) датчика. Чувствительность такого датчика
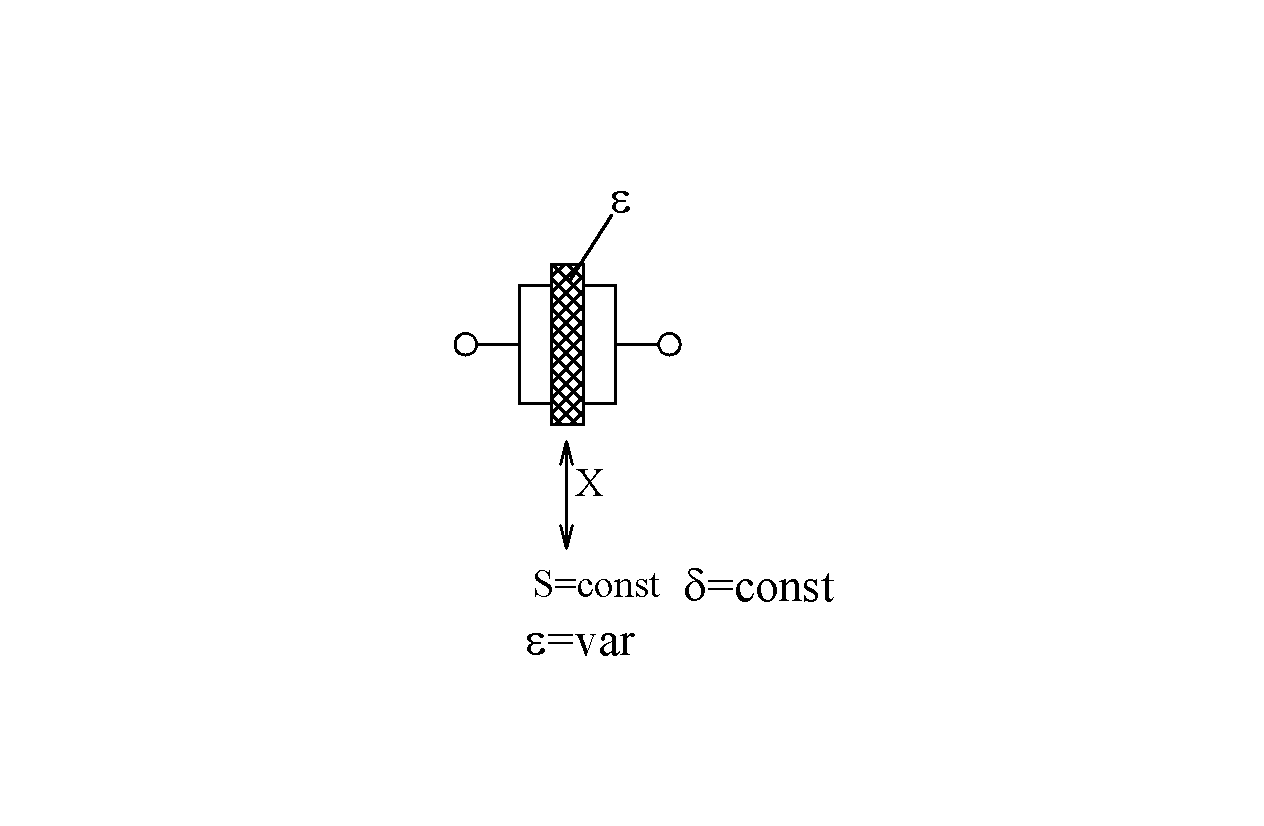
откуда видно, что емкость датчика зависит от δ, ε, α т.е. от S (α). Конструктивно датчики выполняются: - для измерения малых перемещений; толщины покрытий (до 0,1 мм) (рис. 2.3.1); - для измерения малых угловых перемещений (рис. 2.3.2);
Рис. 2.3.1 Рис. 2.3.2 - для измерения линейных перемещений (x>1 мм), уровня вещества, счета количества изделий и в качестве защитной сигнализации (рис. 2.3.3). - для измерения: температуры; давления; напряженности электрического поля; определения диэлектрических свойств вещества; уровня радиации (рис. 2.3.4).
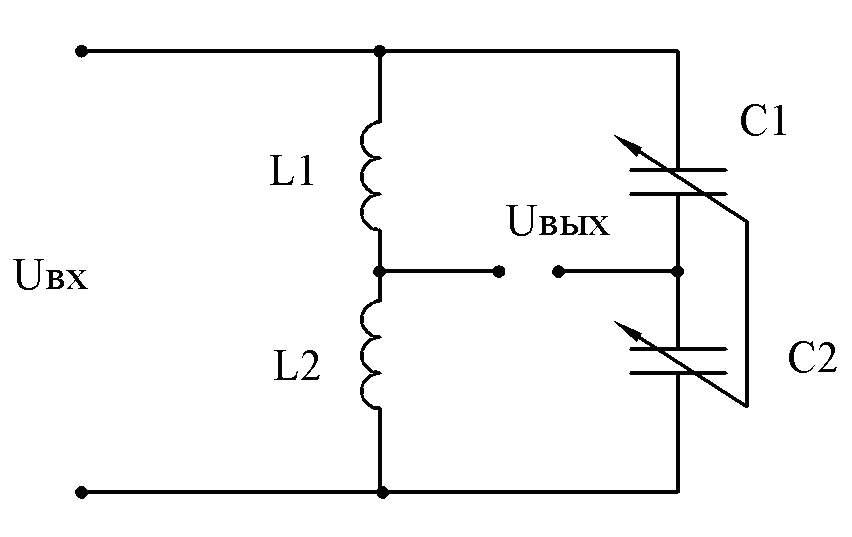
Рис. 2.3.3 Рис. 2.3.4 Так как сила электрического поля между обкладками мала, то рассматриваемые датчики находят широкое применение в тех случаях, когда недопустимы большие измерительные усилия. Все емкостные датчики работают на переменном токе повышенной частоты (до 1000 Гц), что является их недостатком, т. к. усложняется схема устройства из-за необходимости устранения паразитной емкости. Наиболее распространенными схемами включения емкостных датчиков являются контурные и мостовые схемы. Мостовые схемы применяются с дифференциальными емкостными преобразователями (рис. 2.3.5). Это дает возможность получить большую чувствительность при компенсации некоторых вредных внешних факторов (например, температуры).
Рис. 2.3.5 Емкости дифференциального датчика
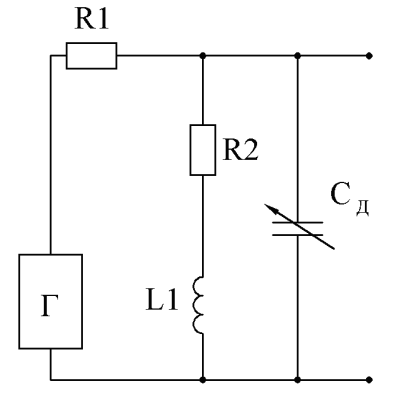
включаются в соседние плечи моста, в два других плеча моста включаются или взаимосвязанные индуктивности (L 1 и L 2), или полуобмотки трансформатора питания (U вх), или низкоомные резисторы. Сигнал на выходе (U вых) такого моста практически линейно зависит от изменения емкости датчика. Схема включения емкостного датчика в контурную цепь (рис. 2.3.6) содержит LC – контур, емкость СД которого образована датчиком и питается от генератора (Г) стабильной частоты. Вследствие изменения емкости датчика изменяется напряжение на построенном контуре U K =U вых.
Рис. 2.3.6 Индукционный датчик (рис. 2.3.7) содержит обмотку 1, сердечник 2 и якорь 3, сердечник 2 и якорь 3 которого выполняются из листовой магнитомягкой электротехнической стали. При перемещении якоря 3 в направлении Х изменяется зазор δ,а при перемещении якоря 3 в направлении Z изменяетсяплощадь перекрытия магнитопровода (зазора) S δ, изменяется индуктивное сопротивление датчика.
Рис. 2.3.7 Индуктивность простейшего датчика
где w – число витков катушки; Z M – полное магнитное сопротивление цепи (1/ Гн); R M и X M – активная и реактивная составляющие магнитного сопротивления; R δ – магнитное сопротивление зазора. А сопротивление зазора
где δ – величина воздушного зазора; S δ – площадь перекрытия магнитопровода (зазора) (м 2); μ0 – магнитная проницаемость воздуха (μ 0 = 4·10-7 Гн/м). Пренебрегая сопротивлением магнитопровода (RM<<Rd), получим индуктивность датчика
Из (2.3.6) следует, что индуктивность датчика зависит от величины зазора (δ) нелинейно (рис. 2.3.8).
Рис. 2.3.8 Приблизительно, в диапазоне изменений Если якорь датчика перемещается по координате Z (рис. 2.3.8), то его индуктивность линейно зависит от Для получения линейной характеристики в большом диапазоне изменения зазора (
Рис. 2.3.9 В нем при
Рис. 2.3.10 Параметры дифференциальных датчиков выбираются исходя из обеспечения линейности U вых на интервале заданного изменения перемещений. Чувствительность простейшего индуктивного датчика:
или
т. е. чувствительность дифференциального индуктивного датчика примерно в два раза выше, чем у простейшего. С точки зрения динамики индуктивные датчики рассматриваются как безынерционные звенья. Индукционные датчики с переменной площадью зазора более универсальны, чем с переменным зазором. Они находят широкое применение в авиации, т. к. удовлетворительно работают при частоте бортовой сети электропитания. Частоты питающих напряжений не превышают 5 кГц, т.к. на более высоких частотах возникают потери на перемагничивание. Для измерения угловых перемещений используются дифференциальные трансформаторные датчики с поворотным движением якоря (рис. 2.3.11).
Рис. 2.3.11 При отклонении якоря от нулевого положения, когда U вых=0, Uвых меняет фазу на 180° и U вых= f (x) достаточно линейно, но зависит от Zн и при наличии в нагрузке реактивной составляющей приобретает нелинейность, а выходной синусоидальный сигнал искажается. Электротепловые датчики используются для измерения температуры и преобразуют изменение температуры в изменение электрической величины: электродвижущей силы (ЭДС) или сопротивления. В зависимости от выходной величины они делятся на термопары и термосопротивления. Для дистанционного измерения температуры применимы терморезисторы, термопара, оптические, яркостные и радиационные пирометры. Терморезисторы, с целью уменьшения погрешности измерения температуры в контролируемом пространстве, при нестабильности температуры окружающей среды, с устройством сравнения соединяют трехпроводной линией. Принцип действия термопары основан на термоэлектрическом эффекте, который состоит в том, что в спае двух разнородных проводников при нагревании появляется ЭДС, значение которой зависит от материалов проводников и от температуры спая. Для измерения температуры (– 200< t °C <+2500) используют термопары с металлическими термоэлектродами (рис. 2.3.12).
Рис. 2.3.12 Значение термо-ЭДС для различных типов термопар колеблется от десятых долей до десятков милливольт. Так, ЭДС для термопар: медь-константан E =4,4 (при +100 °C) мВ/ 1 °C, Е= 6,18 (при – 260 °C); медь-золото-кобальт вольфрам-молибден Е= до 3,8, вольфрам-тантал Е= до 20,0, вольфрам-рений Е= до 30,0. Чувствительность термопар Для измерения высоких температур нашли применение термопары из тугоплавких металлов и соединений: вольфрам-молибден (1300–2400 оС, вольфрам-вольфрам-молибден (1000–2900 оС). Промышленностью СССР и России и за рубежом применяются термопары по указанным ниже (табл. 2.3.1) стандартам: Таблица 2.3.1
Для измерения высоких температур нашли применение термопары из тугоплавких металлов и сплавов: вольфрам-молибден 1300÷2400 ºС; вольфрам-тантал 400÷2000 ºС; вольфрам-рений 0÷2500 ºС; вольфрам-вольфрам-молибден 1000÷2900 ºС. Для различных типов термопар чувствительность различна и неодинакова при разных температурах горячего спая. Для автоматического уменьшения погрешности измерения температуры в контролируемом пространстве, холодные спаи термопар либо термостатируют, либо в зоне холодных спаев размещают терморезистор, которым корректируют результаты измерения температуры.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-23; просмотров: 315; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.009 с.) |

 ,
,
 ,
,
 ,
,
 ,
,





 ,
,
 ,
,
 .
.

 , (
, ( – начальный зазор в магнитопроводе), характеристику
– начальный зазор в магнитопроводе), характеристику  можно считать линейной. Поэтому такие датчики нашли применение для измерения малых перемещений (от единиц мкм до единиц мм).
можно считать линейной. Поэтому такие датчики нашли применение для измерения малых перемещений (от единиц мкм до единиц мм). , т. е.
, т. е.  – линейна. Такие датчики позволяют измерять перемещения в несколько сантиметров.
– линейна. Такие датчики позволяют измерять перемещения в несколько сантиметров.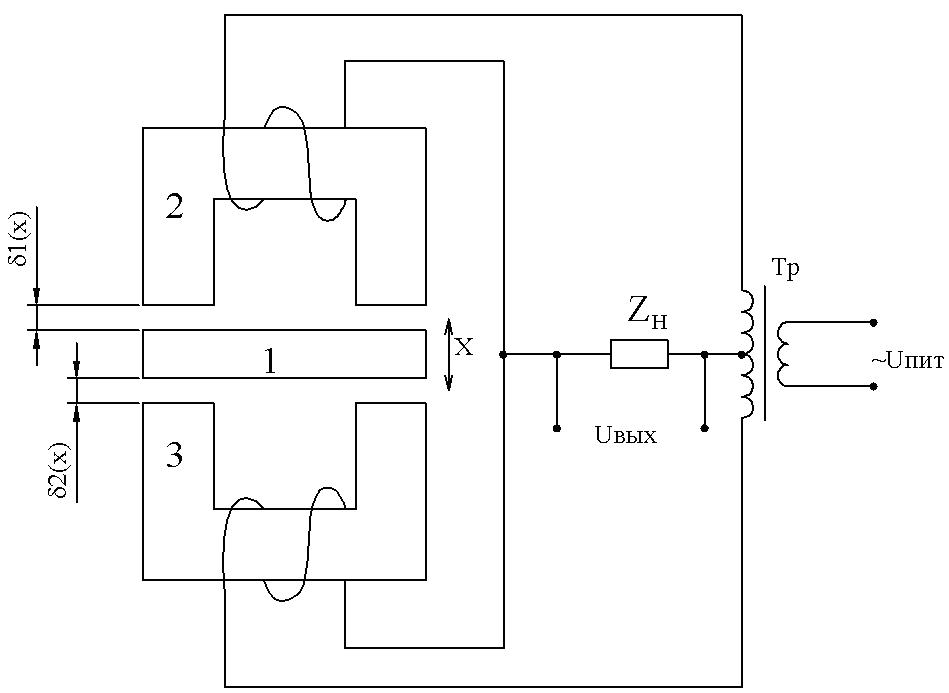
 , L 1= L 2, а U вых=0; при
, L 1= L 2, а U вых=0; при  U вых =f(х), причем при переходе через ноль фаза выходного сигнала меняется на 180°. Для такого датчика U вых =f (х) (рис. 2.3.10).
U вых =f(х), причем при переходе через ноль фаза выходного сигнала меняется на 180°. Для такого датчика U вых =f (х) (рис. 2.3.10).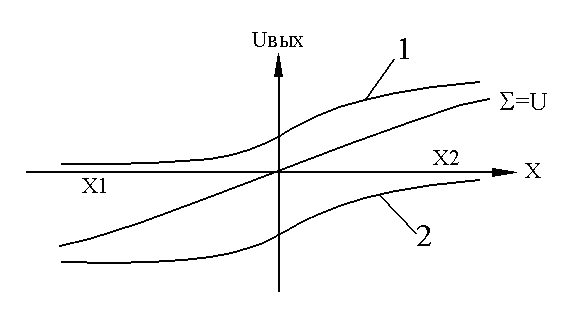


 ,
, , где
, где  – изменение термо-ЭДС при изменении температуры
– изменение термо-ЭДС при изменении температуры  .
.