Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Для резервирования информацииСодержание книги
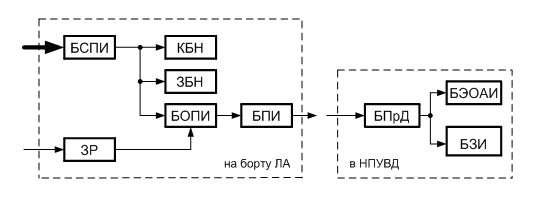
Поиск на нашем сайте Все современные летательные аппараты (ЛА) оборудованы системами, предназначенными для сбора, обработки и анализа полетной информации. Системы эти позволяют непрерывно, в течение всего полета, регистрировать элементы траектории полета, действия экипажа, работу техники и сигналы об отказах или нештатных режимах работы как отдельных агрегатов ЛА, так и в целом ЛА, а в последующем, в камеральных условиях, обрабатывать и анализировать исходную информацию. Для записи исходной информации на борту ЛА используется, как правило, несколько способов и средств записи: механический, оптический, магнитный и, наконец, с использованием элементов электронной памяти (рис. 5.6.1).
Рис. 5.6.1 Все типы систем сбора исходной информации объединяет общее свойство: наличие датчиков состояния объекта контроля, например самолета (рис. 46.1), преобразующих измеряемую величину в электрический сигнал, коммутаторов, последовательно или в порядке убывания приоритетности соединяющих датчики с каналами передачи информации, преобразователей, кодирующих аналоговую информацию в дискретную, и устройств накопления и хранения информации – бортовой накопитель информации (БН). Как правило, на борту ЛА содержится два бортовых самописца, накопителя информации, (рис. 5.6.2) – речевой бортовой накопитель (ЗБН) и параметрический бортовой накопитель (КБН). Конструктивно ЗБН обеспечен механической и тепловой защитой, он размещен в специальном контейнере из высокопрочных материалов и окрашен в оранжевый цвет, для ускорения визуализации места его пребывания. Все, серийно выпускаемые промышленностью, пилотируемые ЛА обеспечены также звуковым регистратором (ЗР), который записывает переговоры экипажа по самолетному переговорному устройству (СПУ). Конструктивно ЗР смонтирован в контейнере из высокопрочных материалов и снабжен тепловой защитой. И ЗБН, и ЗР штатно питаются от бортовой сети электропитания, а в случае отказа бортовой сети электропитания – от резервного источника электропитания, т. е. обеспечены бесперебойным электропитанием.
Рис. 5.6.2 Несмотря на принятые меры по механической и тепловой защите записанной информации, в экстремальных ситуациях затруднены поиск ЗБН и ЗР, а также восстановление и расшифровка записанной на них информации. Для обеспечения безусловного наличия полётной информации на наземных пунктах управления воздушным движением (НПУВД) может найти применение, в дополнение к существующей системе сбора и регистрации полётной информации ЛА, включающей (см. рис. 5.6.2) блок сбора и преобразования информации (БСПИ, соединенный с выходами датчиков), КБН, ЗБН и ЗР, подсистема резервирования полётной информации, включающая на борту ЛА блок обработки и подготовки информации (БОПИ), соединенный входами с выходами БСПИ и ЗР, и блок передачи данных (БПД), соединенный входом с выходом БОПИ, а в НПУВД, блок приема данных (БПрД), соединенный по видеоканалу с БПД, блок записи данных (БЗД) и блок экспресс-обработки и анализа информации (БЭОАИ), соединенные входами с выходами БЗД и БЭОАИ. При этом блок передачи данных (БПД) передаёт информацию на наземное приемное устройство (БПрД), устанавливаемое в НПУВД, где и осуществляется запись, хранение и экспресс-анализ информации, по результатам которого на НПУВД имеется возможность в любой момент времени, и независимо от наличия и состояния бортовых самописцев ЛА, оценить полётную ситуацию и оперативно принять соответствующие меры по обеспечению штатной ситуации и/или минимизации нежелательных последствий отклонения от неё. Предлагаемая подсистема резервирования информации полностью автономна, совместима с любой системой сбора информации, а в принципе позволяет, не прибегая к информации с бортовых самописцев, проводить анализ полетной ситуации. В массометрии Измерение массы материальных объектов, и в особенности объектов со значительными габаритно-весовыми характеристиками в динамике их поступательного движения, сопряжено с трудностями в силу ограниченности функциональных возможностей известной весоизмерительной техники, её значительной инерционности и вносимой погрешности в условиях сейсмической нестабильности. Масса (вес) транспортных средств существенно влияет на их манёвренность и, как следствие, на безаварийность на транспорте, особенно в авиации. В последнее время участились случаи возникновения нештатных ситуаций на судах транспортной авиации, чему причин более чем достаточно. Известны способы измерения веса (массы) объектов с применением рычажных, пружинных, тензометрических, пьезоэлектрических и магнитоанизотропных средств, предполагающие механическое воздействие на чувствительные элементы, на датчики, систем весоизмерения. Но эти способы и средства громоздки и не лишены существенных недостатков, в частности они не позволяют дистанционно и в движении оценить массу (вес) объектов. Цель данной работы – разработка методов и средств контроля массы (веса) объектов в динамике их движения при исключении недостатков известных методов и средств контроля (измерения). Известно, что между любыми двумя материальными точками действуют силы взаимного тяготения, прямо пропорциональные произведению масс этих точек и обратно пропорциональные квадрату расстояния между ними:
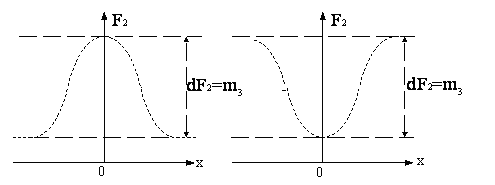
где F – сила взаимного тяготения, действующая на материальную точку с массой m1, r – расстояние между материальными точками с массой m 1 и m 2, а f – гравитационная постоянная (постоянная тяготения). Силы тяготения материальной точки 2 со стороны материальных точек 1 F 21 и 3 F 23 с массами m 1, m 2 и m 3 (рис. 5.7.1 и рис. 5.7.2), соответственно, выражаются как:
но, если значения m 1, m 2 и r 21 постоянны, то и F 21=const, а
здесь m 2 – масса чувствительного элемента датчика значений F 2 (допустимо, в практике контроля массы наземного транспорта, обеспечить m 2= const и r 23= const). Значение суммарной силы тяготения точки 2 F 2 по (5.7.4), при использовании в качестве m 1 массы Земли, достигает экстремума F 2экс при минимизации расстояния между точками 2 и 3 и размещении масс m 1, m 2 и m 3 на одной прямой. Результирующая сила тяготения точки 2 (массы m 2), определяется как
где знак “+” берется при одностороннем расположении точек 1, 2 относительно точки 3, как показано на рис. 5.7.2, а знак “–“ – при расположении точки 2 между точками 1 и 3, как показано на рис. 5.7.1. Но fm 3 m 2 /r 232=0 при m2 =0, что соответствует отсутствию объекта контроля в пространстве контроля.
Рис. 5.7.1 Рис. 5.7.2 Тогда
где q=fm 2 /r 232, а при r 232= const и q=fm 2 /r 232= const, и зависит только от m 3. Таким образом через | dF 2| однозначно интерпретируется масса m 3 (вес P 3, так как P=mg, g ≈9,81= const – ускорение свободного падения) точки (тела в точке) 3. На рис. 5.7.3 и рис. 5.7.4 представлены значения F 2 в функции от места пребывания объекта с массой m3, при перемещении по траекториям a и b, соответственно. При перемещении по траекториям c и d зависимости F 2 претерпевают искажения.
Рис. 5.7.3 Рис. 5.7.4 Реализация алгоритма и средств контроля массы (веса) транспортных средств предполагает (допускает) использование в качестве m1 массу Земли, а в качестве m2 – массу чувствительного к силам взаимного тяготения элемента датчика значений F 2, установку датчика значений F 2 (гравиметра) как под (рис. 5.7.1), так и над (рис. 5.7.2) объектом контроля его массы (веса) m 3. Техническая реализация способа заключается в установке в заданном месте, например, под полотном предстартовой полосы аэропорта, гравиметра с достаточно высокой чувствительностью и в обеспечении связи гравиметр-диспетчер. Информация о фактической массе m (весе P) может визуализироваться и/ли фиксироваться, в том числе и на твердом носителе информации, для контроля и отчетности. В аэропортах, в качестве гравиметров приемлемы приборы с чувствительностью порядка 5÷10 мГал, например типа ГАЭ-3, СН-3, FG5, JILAg, IC5, FC5 и др., обеспечивающие погрешность измерения массы (веса) самолетов, с точностью не хуже ±5 %. Предлагаемый способ приемлем для измерения массы (веса) произвольных объектов, в том числе наземных, морских и воздушных транспортных средств. Недопущение перегрузок транспортных средств, в силу обеспечения гарантированной их маневренности, как ожидается, призвано к сокращению аварийности на транспорте, и в первую очередь – в авиации. В частности аэропорты допустимо оборудовать пунктами контроля массы (веса) выпускаемых в полет транспортных средств, при этом управляющий орган, санкционирующий вылет, имея информацию о фактической массе (весе) подготовленного к вылету объекта, может своевременно воспрепятствовать вылету перегруженного самолета (вертолета), что повышает безопасность пассажиров и экипажа, сохранность грузов и самого транспортного средства. В навигации Современные радионавигационные системы (РНС), включая и спутниковые радионавигационные системы (СРНС), оперируют с гиперболическими данными, так как это связано с определением навигационных параметров (НП) в разностно-дальномерной РНС. Эти РНС ориентированы на опорные станции, в том числе и на искусственные спутники Земли (ИСЗ) комплекса “Nawstar”, координаты которых определяются положением последних в моменты обсервации. Однако помехоустойчивость радионавигационного канала связи тем выше, чем большая часть энергии принятого сигнала используется для измерения РНП, что объясняет применение распространенного метода радионавигационных измерений, основанных на интегрировании доплеровской частоты по
где t 2 –t 1=Δ t – фиксированный интервал времени; V p – радиальная скорость ИСЗ относительно потребителя; F д– доплеровский сдвиг частоты от времени t, а D (t) – расстояние между ИСЗ и потребителем. Фиксированные значения разности дальностей Δ D, соответствующие поверхности положения в виде гиперболоида, из формулы (5.8.1) определяются по
т. е. в произвольные моменты времени t 1 Δ D определяется из
что даёт i -ую поверхность положения. Положение потребителя характеризуется точкой пересечения двух или более гиперболоидов с земной поверхностью. Но этот метод, называемый интегральным доплеровским, не исключает неоднозначности решения навигационной задачи и устраняется, как и в наземных РНС, с помощью априорных данных о координатах потребителя. Кроме того, при движении потребителя точность определения его текущих координат зависит от точности оценки скорости объекта. Наложение гиперболической информации о местоположении потребителя на карту (меркаторскую) судоводителя вносит дополнительные погрешности. Выше перечисленные причины побуждают к решению задачи редукции гиперболических РНП в прямоугольные РНП, что позволяет не только прокладывать курс потребителя и непрерывно (точнее, с дискретностью в одну секунду при использовании ИСЗ системы “Nawstar”) отслеживать поведение объекта на заданном курсе. Решение поставленной задачи достигается программной реализацией следующего алгоритма пересчёта геодезических координат в системе WGS-84, получаемых от СНС, в прямоугольные координаты: 1. Получение геодезических координат от СРНС в системе WGS-84 (градусы, минуты, доли минут). 2. Пересчёт полученных координат с WGS-84 на эллипсоид Красовского 42 года (ЭК-42). 2.1. Вычисление смещения координат точки в ЭК-42 относительно WGS-84, для чего обозначив координаты потребителя, точки Q, в WGS-84 через B 1, L 1, H 1, а в ЭК-42 координаты той же точки Q – через B 2, L 2 и H 2, надлежит рассчитать
где B 1, L 1, H 1 – координаты точки Q в WGS-84, получаемые по протоколу NMEA от СРНС;
здесь M 1 и N 1– коэффициенты; m, p, q –координаты центра эллипсоида Красовского в декартовой системе координат x, y, z, которая связана с элипсоидом WGS-84 так, что ось z связана с осью вращения WGS-84. Параметры m, p, q задаются оператором или устанавливают начальные значения WGS-84 и ЭК-42; a 1, a 2 – большие полуоси эллипсоидов WGS-84 и ЭК-42; λ 1, λ 2 – сжатия эллипсоидов WGS-84 и ЭК-42; e 1, e 2 – эксцентриситеты эллипсоидов WGS-84 и ЭК-42. Примечание. Оси вращения эллипсоидов WGS-84 и ЭК-42 параллельны. Вычисление координат точки Q в ЭК-42:
3. Пересчет геодезических координат ЭК-42 в прямоугольную проекцию. 3.1. Вычисление функций широты:
где: η 2 =N/M –1; t 2 =tg 2 B 2; M – радиус кривизны меридианного сечения; N – радиус кривизны нормального сечения. 3.2. Вычисление прямоугольных плоских координат:
где x – длина дуги меридиана от экватора до параллели данной точки; l (l=L 2– l 0) – долгота относительно осевого меридиана, обычно не превышает 3º (0,0523 радиана); Δ x, Δ y – поправки, вводимые при l> 7 º. 4. Отображение места объекта в прямоугольной проекции в соответствии с координатами, полученными в п. 3 алгоритма. К выше описанному алгоритму и его математическому обеспечению разработан программный продукт, которые при работе с приемоиндикаторами тип GPS, в частности с приемоиндикатором типа СН-1311, и ПЭВМ, совместимой с IBM PC, позволяют визуализировать на экране монитора не только заданный курс потребителя, но и отклонение от него объекта с точностью до 2÷3 метров дискретно через каждую секунду, что существенно повышает точность судовождения и проведения геофизических работ на акваториях. Примеры визуализации навигационной информации приведены на рис. 5.8.1 ÷ 5.8.4. В верхней части главного окна программы Геонавигатор расположено интерактивное меню пользователя, которое позволяет осуществлять необходимые настройки программы. В правой части главного окна программы Геонавигатор отображается текущая информация, поступающая от приемоиндикатора (координаты, скорость, отклонение и т. п.). На рис. 5.8.1 стрелкой отображен объект, движущийся по заданному маршруту, выделено сплошной черной линией. Маршрут, в качестве примера, состоит из шести контрольных точек, обозначены белыми кругами малого диаметра. В каждую из заданных точек должен зайти объект, т. е. здесь представлена информация о задании маршрута, величине пограничных зон и т. п. Окружностью (красной на цветном мониторе), с диаметром заданным оператором, обозначена область, при заходе в которую считается, что объект достиг заданной точки (рис. 5.8.2, рис. 5.8.3).
Рис. 5.8.1 Рис. 5.8.2
Рис. 5.8.3 Рис. 5.8.4 Линиями (светло-зелеными на цветном мониторе), параллельными маршруту, задана граница возможного отклонения объекта от заданного маршрута. Процесс движения объекта по маршруту демонстрируется на экране монитора линией (темно-зеленого цвета), при отклонении объекта от заданного маршрута в правом нижнем углу экрана отображается численное значение этого отклонения. В случае выхода объекта за поле допуска (за заданные границы допустимого отклонения от маршрута), численное значение этого отклонения выделяется желтым цветом. После достижения объектом заданной точки, последняя обозначается красным цветом. Кроме того, на экране дисплея представляется информации о расстоянии до заданной точки, время его преодоления на текущей скорости и отклонение от неё при текущем значении курса судна, что значительно упрощает задачу управления судном. На экран монитора может накладываться информация радиолокационного обеспечения, что позволяет судоводителю снизить вероятность выхода из фарватера и столкновения судов. В спорте Оценка физических возможностей группы мышц человека и их реабилитация, тренировка, развитие, совершенствование представляет интерес в спортивных, при развитии и тренировке индивида, и в медицинских целях, при реабилитации функций мышц после травм. Инструментальные средства контроля состояния тех или иных объектов обеспечивают исключение субъективизма и высокие точность и достоверность результатов анализа состояния человека. В практике реабилитации или тренировки функций мышц человека оказывается весьма желательным, а часто и необходимым, обеспечить щадящий режим нагружения объекта с целью предупреждения перегрузок его организма, что может быть достигнуто за счёт контролируемого режима нагружения его организма, а также повышение достоверности выходной информации путем представления дисперсии нагружения мышц человека по частоте реакции и суммарной наработке за фиксируемый отрезок времени, причем представление реально достигнутых результатов желательно предоставлять как наблюдателю (врачу или тренеру), так и объекту, реабилитирующему (развивающему) ту или иную группу мышц. Желаемый режим реабилитации и/или тренировки объекта достижим с применением устройства управления эргометром (рис. 5.9.1). Устройство содержит генератор A тактовых импульсов, делители B (B1, B2, B3) частоты импульсов, блок C усиления, блок D биостимуляции, датчик E сокращения нагружаемой группы мышц объекта О, датчик G сердечных сокращений объекта О, блок H задания пороговых значений частоты сокращения сердца объекта О, счетчики K (K1, K2, K3) импульсов, коммутатор L, формирователи M (M1, M2, M3, M4, M5) импульсов, элемент НЕ N, элементы И P (P1, P2, P3), элемент ИЛИ Q, группы R (R1, R2) элементов И, триггеры S (S1, S2), группа T элементов ИЛИ, блоки U (U1, U2, U3, U4) индикации (индикаторы), блок V задания времени выдержки, элементы W (W1, W2) задержки, аналого-цифровой преобразователь (АЦП) X, блок Y определения границ поля дисперсии параметра и сумматор Z.
Рис. 5.9.1 Блок Y определения границ поля дисперсии параметра содержит (рис. 5.9.2.) группы R (R3, R4, R5) элементов И, триггер S (S3), регистры SS (SS1, SS2) памяти, элементы Q (Q1, Q2, Q2) ИЛИ, элемент N (N2) НЕ, формирователи M (M6, M7, M8, M9) импульсов, элементы W (W3, W4) задержки, элементы Q (Q1, Q2, Q3) ИЛИ, группы P (P4, P5) элементов И, формирователи M (M7, M8, M9) импульсов, регистры SS (SS1, SS2, SS3) памяти, блоки HH (HH1, HH2) сравнения и шифратор BS.
Рис. 5.9.2 Устройство работает следующим образом. В блоке H задания значений частоты устанавливается допустимое значение частоты сердечных сокращений конкретного человека и соответствующий код через его выходы поступает на установочные входы делителя B2. В блоке V задания времени выдержки устанавливается значение времени тестирования объекта (реабилитируемого, тренируемого или исследуемого человека) и соответствующий код через его входы поступает на входы управления делителя B3 частоты. По импульсу запуска устройства, через его вход запуска, триггер S переводится в единичное состояние, и высокий потенциал с его единичного выхода поступает на вход управления генератора A и на вход элемента P 1 И. При этом генератор A вырабатывает импульсы с эталонной частотой F1, тогда на выходе делителя B1 устанавливается частота импульсов F2, на выходе делителя B3 – F 3, на выходе делителя B4 – F 4, а так как на выходах группы T элементов ИЛИ нулевые потенциалы, то F 2=0, в силу условия F 2 =F 1 /K 2, где К 2 – коэффициент пересчета импульсов делителя B 1, снимаемых с выходов группы T элементов ИЛИ F 3 =F 1 /K 3, где К 3– коэффициент пересчета импульсов делителя B 3, снимаемых с выходов блока V, a F 4 =F 1 /K 4, где K 4 – коэффициент пересчета импульсов делителя B2, снимаемых с выходов блока H. Каждое сокращение контролируемой группы мышц реабилитируемого (тестируемого, тренируемого) объекта О вызывает появление импульса на выходе датчика E, а следовательно, и на выходе формирователя M2, тогда на выходах формирователей M4 и M5 генерируются короткие импульсы в моменты перехода импульсов с выходов датчиков E и G соответственно из области значений ниже порога срабатывания формирователя M2 в область значений выше порога срабатывания формирователя M2. Импульсы с выхода формирователя M4 через элементы P1 И и Q ИЛИ, при наличии высоких потенциалов на первых двух входах, поступают на вход счетного триггера S1 и каждый раз опрокидывают (переводят) его в противоположное состояние, т. е. обеспечивается поочередное состояние высокого и низкого потенциалов на выходах триггера S1. Кроме того, информация с выходов датчика E поступает на информационный вход АЦП X, а через формирователь M4, элемент И P1, элемент ИЛИ Q и элемент задержки W1 и на вход управления АЦП X, а с задержкой во времени элементом W2 задержки с выходов АЦП X суммируется сумматором Z и отображается блоком U4. Высокий потенциал с выхода триггера S1 поступает на вход формирователя M2 (или M3), на вход элемента И P2 (или P3) и на входы группы R1 (или R2) элементов И. При этом передним фронтом импульса с выхода триггера S1, через формирователь M2 (или M3) счетчик K2 (или K3) обнуляется, а в течение длительности импульса с выхода триггера S1 импульсы с выхода генератора A через элемент И P2 (или P3) поступают на счетный вход счетчика K2 (или K3), где производится подсчет числа импульсов. На время высокого потенциала на выходе триггера S1 элементы И R2 (или R1) открыты и содержимое счетчика K3 (или K2) через элементы И R2 (или R1) и группу элементов ИЛИ T управляет пересчетом делителя B1 и индицируется блоком U1, а кроме того, поступив на информационные входы блока Y, обрабатывается в нем и индицируется блоком U2 (или U3). Коэффициент пересчета делителя B1 определяется из F 5 /К 2 =F 2, где F 5 – текущее значение частоты сокращения контролируемой группы мышц, так, чтобы стимулирующее воздействие на выходе блока D всегда оказывалось лидирующим по времени (с опережением по фазе) и чтобы, по возможности, сохранялась постоянной разность фаз между воздействиями (сигналами) и реакциями групп мышц. По мере нагружения объекта O частота и/или амплитуда сигналов на выходе датчика E возрастают, а, следовательно, повышается и F2, но при этом растет и частота сердечных сокращений. Каждый импульс с выхода датчика G через формирователь M5 фиксируется счетчиком K1, но каждым импульсом с выхода делителя B1 счетчик K1 обнуляется. Коммутатором L обеспечивается вывод высокого потенциала с выходов счетчика K 1 только при выполнении неравенства F 6 >F 4, а при F 6 <F 4 или F 6 =F 4 на выходе коммутатора импульсов L сохраняется низкий (нулевой) потенциал. Высоким потенциалом с выхода коммутатора L через формирователь M1 опрокидывается триггер S1 досрочно, в результате чего содержимое одного из счетчиков K2 или K3 фиксируется на меньшем уровне, а делитель B1 частоты на своем выходе соответственно снижает частоту выходных импульсов воздействия на объект О, на выходе элемента НЕ N устанавливается низкий потенциал, запрещающий управление триггером S1 через элемент P1 И, АЦП X и сумматором Z от датчика E. Импульсом с выхода формирователя M1 сумматором Z фиксируется нулевое значение наработки, т. к. на выходе датчика E в это время низкий по амплитуде потенциал. Будучи соединенным через вентиль выход коммутатора L с нулевым входом триггера S2 (на схеме не показано), передним фронтом высокого потенциала с выхода коммутатора L, генератор A может досрочно остановиться, прекратив работу устройства, но зафиксировав выходные параметры объекта О в блоках U1, U2, U3 и U4. Без соединения выход коммутатора L – вентиль – нулевой вход триггера S2 устройство снижает частоту стимулирующих воздействий, выполняя роль их регулятора по текущим значениям частоты сердечных сокращений, т. е. по фактическому психофизическому состоянию объекта, создавая тем самым последнему щадящий, не превышающий допуска, режим нагружения. Устройство обеспечивает реабилитацию функций мышц, тестирование и тренировку объекта (спортсмена) в спринтерском или в стайерском режиме нагружения его мышц, т.е. обеспечивается, в обязательном порядке, ограничение по предупреждению перегрузки. Таким образом, использование описанного устройства управления эргометром выгодно его отличает от известных устройств аналогичного назначения. Его целесообразно использовать для управления реабилитацией, тренировкой или разработкой функций мышц человека, в частности, и при тренировках спортсменов, причем на устройствах индикации отображается информация в масштабе реального времени и в числовом выражении. Объективная, в масштабе реального времени, информация обеспечивает заинтересованность объекта (реабилитируемого, тренируемого, спортсмена) и врача или тренера в достижении успеха, а равно и в аппаратных средствах управления нагружением (эргометрией) групп мышц при их реабилитации (тренировке). 5.10. Для защиты прав потребителей; Водоснабжение населённых пунктов подконтрольно органам государственного санитарного надзора и предусматривает ряд требований по качественным характеристикам воды поступающей её потребителям. В частности, питьевая вода должна подвергаться очистке, т. к. воды поверхностных и подземных источников обычно непригодны для пищевых целей из-за мутности, цветности и более высокого, чем допустимо для питьевой воды, содержания бактерий. Осветления и обесцвечивания воды достигают коагуляцией взвешенных частиц сернокислым алюминием или хлорным железом с последующей фильтрацией. Для обеззараживания в исходную или фильтрованную воду вводят жидкий хлор, хлорную известь или озон, а достаточно осветлённая вода может обеззараживаться ультрафиолетовыми излучениями. Слишком жесткая (соли кальция и магния) вода умягчается реагентными (до 0,5÷0,7 мг-экв/л) или катионитовыми (до 0,03 мг-экв/л) методами, при наличии в воде более 0,3 мг/л железа, её обезжелезивают аэрацией, при этом кислород воздуха окисляет соли двухвалентного железа в соли трехвалентного железа, выпадающие в осадок. Дегазация воды (удаление сероводорода, метана, радона, углекислого газа и др.) производится, как правило, аэрацией, а избыток фтора (более 1,5 мг/л) удаляют фильтрованием воды через активированную окись алюминия. Дезодорация воды (удаление веществ, обуславливающих привкусы и запахи) достигается сорбцией их активированным углем, двуокисью хлора, перманганатом калия или окислением озоном. Но качество воды традиционными методами трудно подконтрольно, особенно в масштабе времени, близком к реальному. Для оперативного, в масштабе реального времени, контроля качества воды целесообразно использование автоматических инструментальных средств, автоматически учитывающих содержание в воде хлора (вредного для организма человека и животных), её кислотность (pH ≈7 при 22 °С), прозрачность (осветленность), а также давление (P >>4 атм) в водопроводе и скорость расхода в каждую единицу времени, а по результатам контроля – осуществление, с учетом времени суток потребления воды и выше перечисленных подконтрольных параметров, взаиморасчетов между поставщиком и потребителем воды. Кроме того, что при этом исключается вольный или невольный субъективизм в результатах контроля качества и количества потребленной питьевой воды, следует ожидать и повышения точности этого контроля, а это создает предпосылки к отказу от применения для нужд очистки хлора и его соединений, к обеспечению потребителей питьевой водой надлежащего качества, к объективной оценке взаимоотношений между поставщиком и потребителем, а также – к автоматизированному регулированию содержания водопроводных сетей, качества воды и её расхода. В первом приближении достичь желаемой цели можно, воспользовавшись известным устройством для регулирования водопотребления (рис. 5.10.1). Устройство содержит генератор эталонных импульсов (ГИ), датчик давления (ДД) в водопроводе, датчик скорости расхода (ДР) воды, датчик солености (ДС) воды, датчик прозрачности (ДП) воды, датчик концентрации хлора (ДХ) в воде, суммирующий счетчик импульсов (СИ), аналого-цифровые преобразователи (АЦП), кольцевой регистр сдвига (РС), дешифраторы (ДШ), элемент ИЛИ, группы элементов И (n И), элемент задержки (ЭЗ), блок умножения (БМ), регистр оперативной памяти (РОП), формирователь заднего фронта импульса (ФИ), блок суммирования (БС) и индикатор (И).
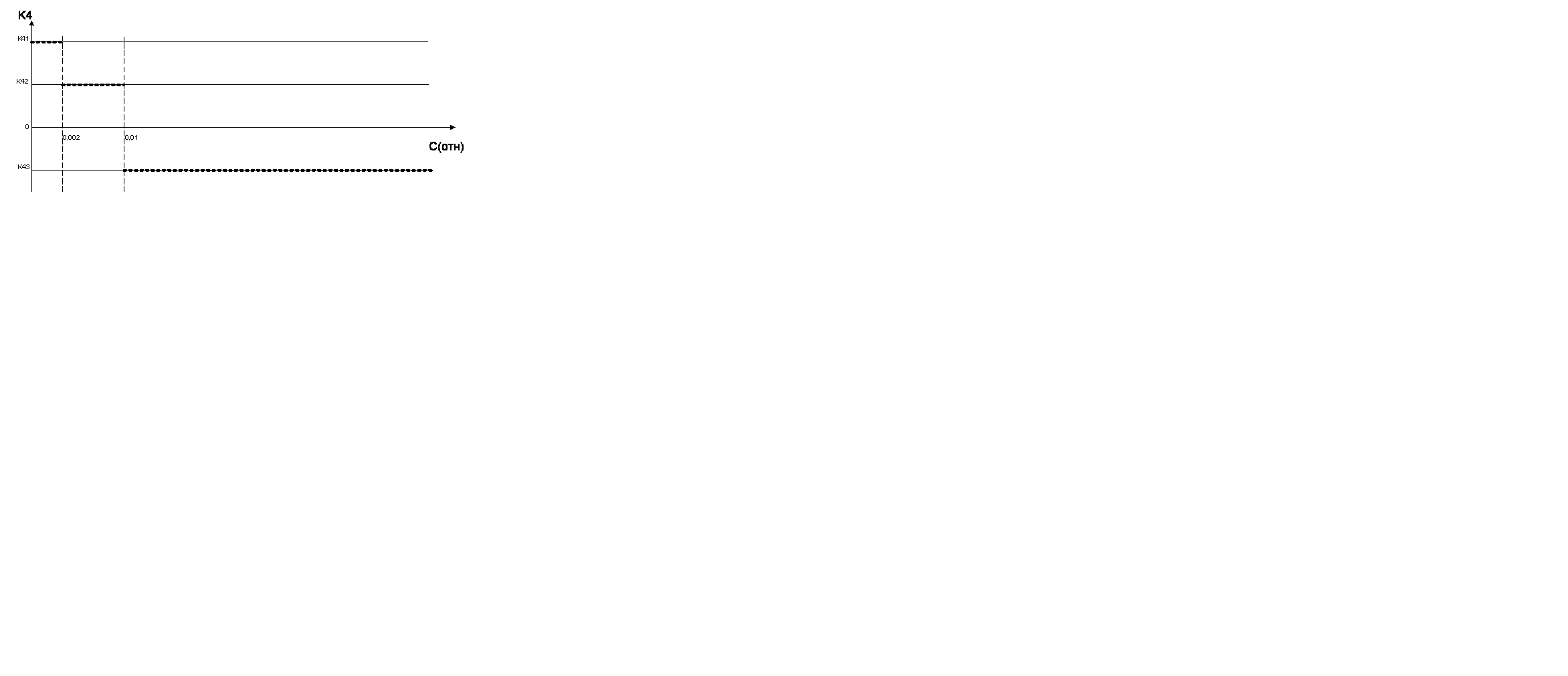
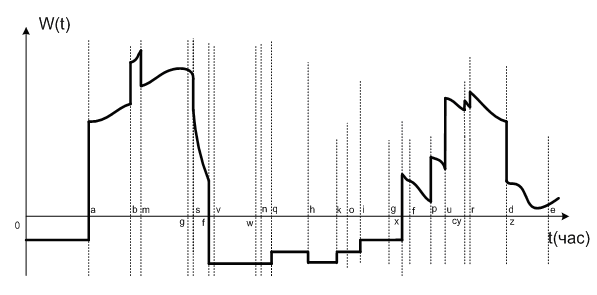
Рис. 5.10.1 Это устройство по коэффициентам спроса на воду в течение суток К 1 =f (t суток), всегда положительным, коэффициентам К 2 =f (P (t)), зависящим от текущих значений давления в водопроводе, коэффициентам К 3 =f (С (t)), зависящим от текущих значений солености воды, коэффициентам К 4 =f (П (t)), зависящим от текущих значений прозрачности воды и коэффициентам К 5 =f (Х (t)) зависящим от текущих значений концентрации хлора в воде, положительным при удовлетворительном состоянии P (t), C (t), П (t) и Х (t), и отрицательным при выходе за поле допуска, при превышении ПДК, параметров P (t), C (t), П (t) и Х (t), призвано стимулировать исключение субъективизма на всех этапах жизнедеятельности. Так, если, например, коэффициенты К 1, К 2, К 3 и К 4 принимают значения, как показано на рис. 5.10.2, рис. 5.10.3, рис. 5.10.4 и рис. 5.10.5, соответственно. При поведении параметров Р (t), С (t) и П (t), как показано на рис. 5.10.6, рис. 5.10.7 и рис. 5.10.8, а следовательно и коэффициентов К 1, К 2, К 3, К 4, мгновенные значения потребности в воде (показано пунктиром) и фактическом её потреблении (показано штрих-пунктиром), как показано на рис. 5.10.9, интегральные мгновенные зачетные значения потребления воды W(t) оцениваются по (5.10.1) и принимают вид, представленный на рис. 5.10.10. W (t)=V (t) K 1(t) K 2(t) K 3(t) K 4(t) K5 (t), (5.10.1)
Рис. 5.10.4 Рис. 5.10.5
Рис. 5.10.6 Рис. 5.10.7
Рис. 5.10.8 Рис. 5.10.9
Рис. 5.10.10 Тогда за определённый период времени (с t 1 по t 2) зачётное значение расхода – потребления воды определяется из W=∫V (t) K 1(t) K 2(t) K 3(t) K 4(t) K 5(t) dt. (5.10.2) Отсюда видно, что автоматическая сертификация качества воды по экологическим показателям, т. е. по концентрации в воде солей и хлора, взвешенных частиц и красящих веществ, и её учёт по совокупности критериев, с одной стороны стимулируют поставщика к заботе о качестве воды, состоянию водопроводных сетей и поддержанию нормального давления в них, в силу размещения устройства на отводе к каждому потребителю. С другой стороны, применение описанного устройства стимулирует потребителя к бережному, особенно в периоды повышенного спроса, расходу воды. Таким образом, устройство для регулирования водопотребления позволяет обеспечить автоматизированное, за счет варьирования зачетных, по совокупности критериев в каждую единицу времени, значений расхода воды, регулирование её расхода и исключение субъективизма во взаимоотношениях поставщик-потребитель питьевой воды.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-23; просмотров: 189; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.2 (0.011 с.) |




 ,
,


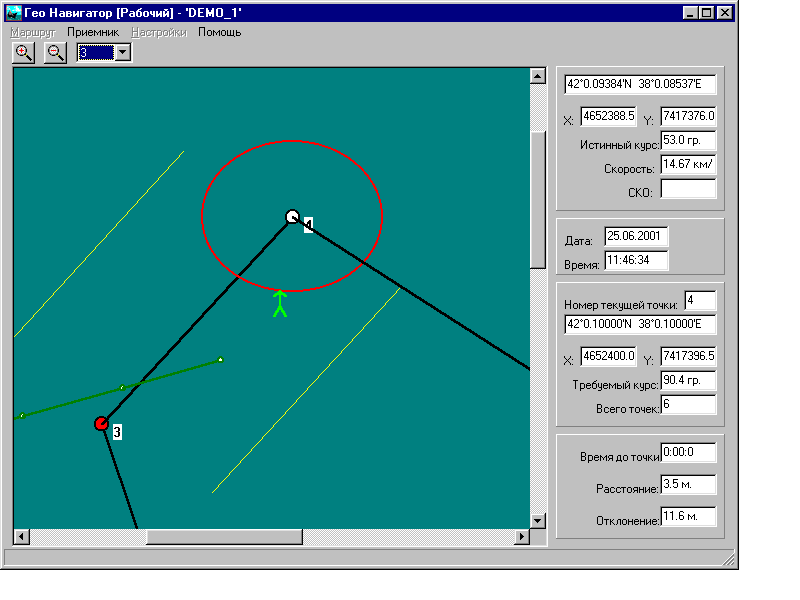
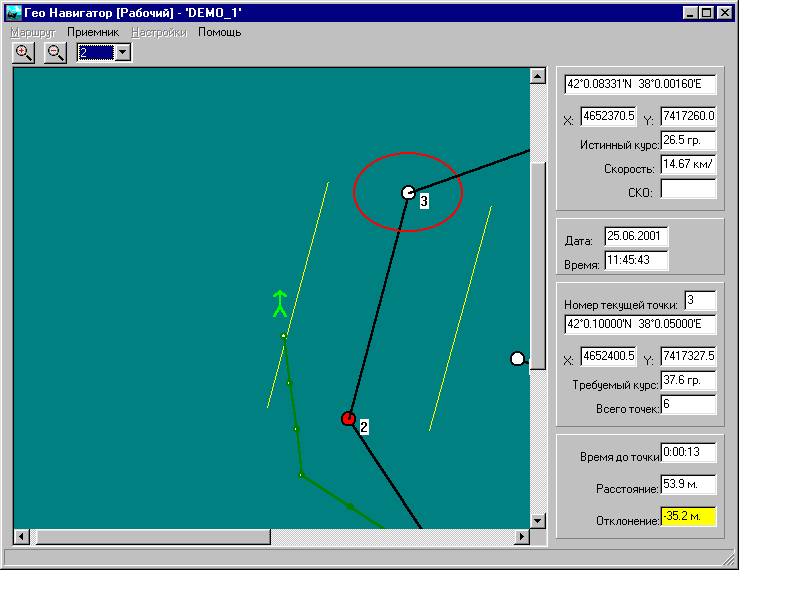




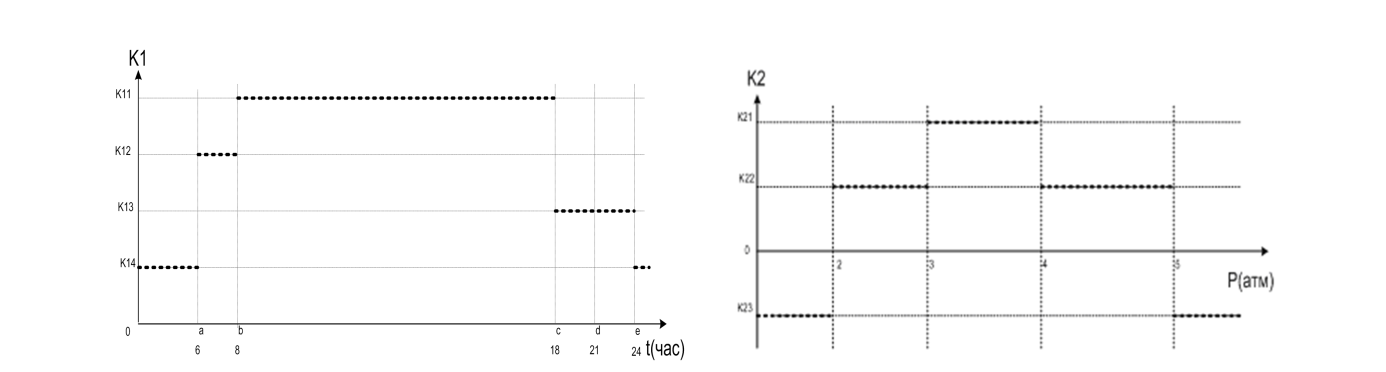 Рис. 5.10.2 Рис. 5.10.3
Рис. 5.10.2 Рис. 5.10.3