
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Для эргатических систем манипулирования
Основным отличием дистанционно управляемых человеком-оператором манипуляционных систем от автоматических манипуляторов является участие человека-оператора в процессе управления. Эти роботы манипуляторы представляют собой человеко-машинные (эргатические) системы обладают существенными особенностями по сравнению с автоматическими системами. Во-первых, это разнообразие разнообразных операций. Если в системах слежения, управления транспортными средствами, в т. ч. наземного, морского, воздушного, космического базирования и т. п. выполняется, как правило, одна, хотя и достаточно сложная операция, то в эргатической манипуляционной системе оператор может управлять процессом манипулирования по способу выполнения, характеру деятельности оператора, используемой операции. Вторая особенность эргатических манипуляционных систем заключается в возможности выбора оператором различных способов управления при выполнении одной и той же операции, в т. ч. по положению, вектору скорости, вектору силы, или комбинированные способы управления.. Третье отличие эргатических манипуляционных систем от большинства дистанционных систем управления человеком определяется особенностями объекта управления как динамической системы. Движение манипуляционного механизма описывается системой нелинейных дифференциальных уравнений высокого порядка. При этом качественные характеристики процесса управления, воспринимаемые оператором, зависят от текущего положения, как самого манипулятора, так и объекта манипулирования в пространстве, массы объекта манипулирования, модуля и направления внешних сил и моментов, приложенных к объекту. Наконец, отличительной чертой эргатических систем управления является активное использование оператором в процессе управления наряду с устройствами отображения визуальной информации других информационных средств. Так, оператор может использовать информацию о силах и моментах, действующих на объект манипулирования, тактильную информацию при контакте манипулятора с объектами зоны его манипулирования. Известны системы манипулирования, в которых используется акустическая информация и даже информация, воспринимаемая оператором посредством вестибулярного аппарата. Т. о., эргатические манипуляционные системы являются средством сложной предметной деятельности человека. В ней, как в обычной трудовой деятельности, сочетается воздействие оператора на материальные объекты внешней среды с получением необходимой сенсорной информации. Эргатические манипуляционные системы наиболее полно реализуют предметную деятельность человека, и в этом состоит их отличие от всех других систем «человек-машина».
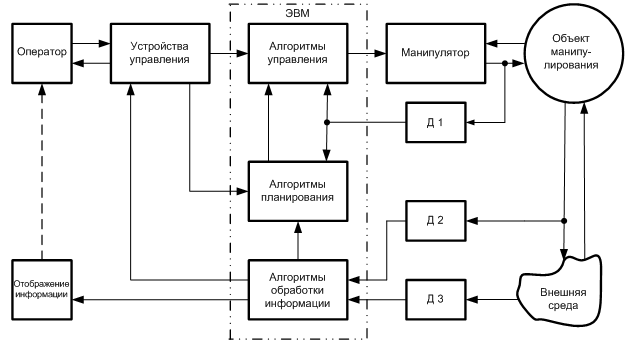
Особенности эргатических систем обусловливают необходимость в антропоцентрических подходах, это формализация всего множества возможных операций, выделив наиболее характерные, типовые операции, отнесенные к одной и той же группе только в том случае, если при их выполнении идентична структура деятельности оператора. Показатели качества выполнения операций эргатической системой, как и в случае автоматической системы, определяются степенью успешности решения технологических задач. Однако эти показатели различны для различных операций и ввиду участия оператора в процессе управления носят статистический характер. Выбор обобщенных показателей, характеризующих качество эргатической системы при выполнении различных типовых операций, является важным этапом функционирования эргатических манипуляторов. Если определены аппаратные способы их вычисления, то имеется возможность для решения задачи анализа эргатической системы, в т. ч. сравнительного анализа способов управления, различных конструкций манипулятора, а также влияния параметров системы управления на качество эргатической системы. В эргатической манипуляционной системе (рис. 5.19.1) оператор осуществляет управление манипулятором с применением ЭВМ, используя соответствующие задающие устройства (задатчики), позволяющие обеспечить управление объектом управления с шестью степенями свободы. Управляющие сигналы на приводы манипулятора, снабженные датчиками обратной связи Д 1, рассчитываются микропроцессором, в соответствии с алгоритмами управления исполнительного уровня. ЭВМ служит для обработки сигналов с датчиков Д 2 состояния объекта манипулирования и Д 3 состояния внешней среды, но может использоваться и для планирования траекторий движения, удовлетворяющих заданным требованиям. На основании показаний датчиков формируется информационная модель выполняемой операции, предоставляемая оператору средствами отображения информации. Может также использоваться информация о силах и моментах, действующих на объект манипулирования, которая воспроизводится с помощью датчиков отображения тактильной информации.
Рис. 5.19.1 Технологическая цепь операции при свободном манипулировании объектом определяется условиями, налагаемыми на соответствующие переменные: Iq (x (t), x ’(t), x ’’(t), F (t), t)≤ εq, q =1,…, l, t где x – 6×1-вектор положения центра масс и ориентации объекта манипулирования; F – 6×1-вектор сил и моментов, действующих на объект манипулирования; εq =const; T – время выполнения операции. При наличии связей, наложенных на движение объекта, к неравенствам (60.1) добавляются уравнения или неравенства, определяющие связи, а технологическая цепь операции описывается условиями вида Iq (x (t), x ’(t), x ’’(t), F (t))≤ εq, q =1,…, l. (5.19.2) В левую часть этих неравенств могут входить постоянные векторы x * и x ’*, определяющие требуемое положение или скорость перемещения объекта манипулирования. Простые операции, у которых совпадают заданные параметры в условиях (5.19.1) и (5.19.2), представляют собой множество случайных реализаций, полученных при неизменных условиях работы. При выполнении операций захватывания движущихся объектов в левую часть неравенства (5.19.1) должна входить случайная функция x *(t), характеризующая движение объекта в поле зрения оператора. При выполнении эргатическим манипулятором отдельной простой операции наиболее полной оценкой качества является вероятность достижения технологической цели: I = P (I 1≤ ε 1, I 2≤ ε 2, …, Il ≤ εl), (5.19.3) более простыми оценками являются центральные моменты функционалов Iq, q =1, …, l различных порядков k:
Если, в частности, распределение вероятности Iq близко к нормальному, то достаточно полная оценка достигается моментами первого и второго порядков: Mq = M { Iq }; mq (2)= M { Iq 2}= D { Iq }= σq 2; mqiqi (2)= M { IqiIqi }, Которые характеризуют математическое ожидание функционалов Iq, их дисперсию и взаимную корреляцию. Модель управления колебательной системой описывается передаточными функциями вида Wi 0(p)= ky, i=1, 2, 3. Процесс управления при выполнении терминальной операции с достаточной точностью описывается единичной переходной функцией колебательного звена Wi (p)= (T i2 p 2+2 ξ i T i p +1)-1. При этом постоянные ξ i и T i эргатической системы зависят от соответствующих постоянных ξ 0 и T 0 исполнительной части. Уравнения исполнительной части системы манипулятора, включающей исполнительный механизма, механизм передачи движений и приводы степеней подвижности,линеаризуются в окрестности исследуемой точки q *. При этом справедливы уравнения вида: H (p) q = μ 0– μ в, (5.19.5) μ 0= W M(p)(u – q) – Wc (p) q, (5.19.6) где H (p)= ap 2+ bp + c; μ в= CF В+ DM В; q – вектор обобщенных координат исполнительного механизма; μ 0 – вектор моментов, развиваемых приводами; μв – вектор моментов, обусловленных внешними силами F В и моментами M В; a, b, c, C, D – матрицы, зависящие от координат q*, соответствующих стационарной точке; W M(p) и Wc (p) диагональные передаточные матрицы размера n × n, где n – число степеней подвижности манипуляционного механизма.
Чтобы получить математическую модель системы управления, к уравнениям (5.19.5) и (5.19.6) следует добавить уравнения, определяющие способ формирования управляющих сигналов. При управлении по положению, в частности, справедливо u = p -1 J *-1 R (v - x), (5.19.7) где J *= J (q *) – матрица Якоби для соотношения x = f (q); v – вектор управляющих сигналов, заданных оператором; R – диагональная матрица коэффициентов масштаба. Полагая, что в окрестности точки q * приближенно справедливо равенство x = J * q, x = W (p)– W в(p) μ в, (5.19.8) где W (p)= J * L (p) W M(p)-1 J -1 R – передаточная матрица системы по управляющему воздействию; W В(p)= J * L (p) – передаточная матрица системы по возмущению; L (p)=[ H (p)+ W M(p) p -1 R + W M(p)+ Wc (p)]-1. Структурная схема системы манипулирования приведена на рис. 5.19.2.
Рис. 5.19.2 Устойчивость системы управления определяется из уравнения ∆(p)=∆1(p) det [ E + R 1(p)] detJ *-1, (5.19.9) где ∆1(p) – характеристический определитель комплекса приводов; R 1(p)=[ H (p)+ W M(p)+ W c(p)]-1 W M(p) p -1 R. Качество управления манипулированием зависит от влияния возмущений и неопределенностей u (x, x p, ξ)= U (x, которое обеспечивает устойчивость x p(t) на конечном интервале времени [ t 0, t T]. Более эффективные законы управления, обеспечивающие асимптотическую устойчивость манипулирования, имеют вид: u (x, x p, ξ)= U [ x, где Г – некоторая устойчивая n × n -матрица коэффициентов усиления в каналах обратной связи, обеспечивающая заданный характер затухания переходных процессов e (t)= x (t)– x p(t). Наибольшее влияние на качество управления оказывают начальные возмущения e (t 0)= x (t 0)– x 0(t 0), неконтролируемые постоянно действующие возмущения π (t) и неизвестные параметрические возмущения ω (t)= ξ (t)– τ (t). Степень влияния указанных факторов на характер переходных процессов существенно зависит от вида закона управления. При отсутствии параметрических и постоянно действующих возмущений законы (5.19.11) обеспечивают не только асимптотическую устойчивость системы, но и наперед заданный характер затухания переходных процессов. Оценка влияния параметрических, постоянно действующих и начальных возмущений на качество переходных процессов при использовании (5.19.11) принимает вид || e (t)||≤ c || e (t 0)|| exp [– γ (t – t 0)+ cγ -1[g|| ω (t)||+|| π (t)||], (5.19.12)
где c и γ – положительные числа, зависящие только от выбора матрицы коэффициентов усиления Г. эта оценка устанавливает явную зависимость переходных процессов от начальных, постоянно действующих и параметрических возмущений. Анализ соотношения (5.19.12) позволяет сделать следующие выводы: 1) влияние начальных возмущений e (t 0) на точность отработки команды на манипулирование с течением времени убывает по экспоненте; 2) допустимая точность перемещения объекта манипулирования принципиально ограничена уровнем неизвестных параметрических и постоянно действующих возмущений; 3) если параметры ξ известны, а возмущения π отсутствуют, то затухание переходных процессов подчиняется экспоненциальному закону. Уровень неопределенности при управлении манипулированием характеризуется величиной || ω (t)||: чем больше этот уровень, тем хуже качество управления. На практике при большем уровне неопределенности наблюдаются не только снижение точности манипулирования, но и автоколебания или даже потеря устойчивости. Радикальным средством компенсации параметрических возмущений и ухудшения качества переходных процессов в условиях неопределенности является автоподстройка параметров τ закона управления с использованием алгоритмов автоматической адаптации. Цель этих мероприятий состоит в гашении параметрических возмущений ω (t), поэтому критерием адаптивности системы может служить соотношение
Согласно этому критерию из возможных оценок τ (t) отбираются асимптотически приближающиеся к неизвестным значениям параметров ξ, но часто требование (5.19.13) – излишне жесткое.
|
||||||||
|
|
Последнее изменение этой страницы: 2017-01-23; просмотров: 108; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.141.165.180 (0.028 с.) |
 = M {
= M {  …
…  },
},  = k. (5.19.4)
= k. (5.19.4)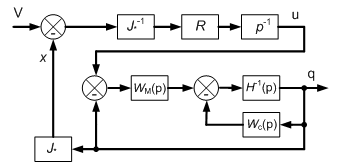
 x’ p, ξ), (5.19.10)
x’ p, ξ), (5.19.10) lim || ω (t)||=0, t0≤t→∞. (5.19.13)
lim || ω (t)||=0, t0≤t→∞. (5.19.13)


