Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Классификация методов диагностикиСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
На рис. 7.74 представлена классификация методов диагностики СШНУ. Эффективность работы одного из самых распространенных видов оборудования для механизированной добычи нефти — штанговых скважинных насосных установок -зависит от очень многих факторов, определяемых как правильным выбором отдельных элементов оборудования, так и правильной эксплуатацией, обслуживанием и своевременным ремонтом оборудования. Подбор оборудования СШНУ и режимов ее эксплуатации определяется геолого-техническими данными скважины. В тоже время дебит скважины, зависит от величины забойного и пластового давления, давления насыщения, газового фактора, обводненности нефти и некоторых других факторов изменяющихся впроцессе эксплуатации. Проведение же постоян ных замеров и расчетов требуют больших затрат времени и трудовых ресурсов. С другой стороны, несовершенство современных групповых замерных установок, не позволяющих достаточно точно определить дебит малопродуктивных, скважин также осложняет работы по повышению эффективности работы штанговых установок. Поэтому диагностирование работы СШНУ, позволяющее оперативно определить параметры работы оборудования является необходимым процессом, которому в последнее время уделяется все большее внимание как со стороны эксплуатационников, так и со стороны научно-исследовательских и внедренческих фирм. Диагностирование работоспособности элементов СШНУ и определение основных параметров комплекса «скважина — пласт — оборудование» возможно двумя основными методами. Прямой замер действительных показателей давления жидкости, температуры и состава продукции непосредственно на приеме скважинного насоса и в других характерных точках скважины и передача этих данных на поверхность по специальным кабелям. Затем эта информация обрабатывается, анализируется и согласовывается с информацией, полученной от поверхностных наземных источников, таких, например, как динамометр и расходомер. Информация, полученная таким путем, является наиболее достоверной и полной, но такая система диагностики является сложной и дорогой, как в монтаже, так и в эксплуатации. Динамометрирование СШНУ является основным способом диагностирования работы ШГН, колонны штанг, насосно-компрессорных труб и СК. Разработанные многими ученными и инженерами (Eickmeier J.R., Gibbs S.G., Neely A.B., Patton L.D., Adamache I., Slonneger J.C., Вирновский А.С., Чар-ный И А., Белов И.Г., Адонин А.Н., Пирвердян A.M., Касьяновым В.М. и др.) [20, 21, 22, 23, 24, 25, 26, 27] теоретические обоснования и математические модели процесса добычи нефти скважинными насосными установками позволяют обрабатывать динамограммы для их последующего анализа и определения неисправностей. При помощи динамограмм можно установить многочисленные параметры работы глубинонасосных установок, знание которых значительно облегчает как обнаружение неисправностей.
Рис. 7.74. Классификация методов диагностики СШНУ
Для динамометрирования у нас в стране и зарубежом используются различные приборы отличающиеся по конструкции и принципам действия системы. Рассмотрим некоторые из них. Наиболее распространенным в мире является гидравлический геликсный динамометр, устанавливаемый между траверсами канатной подвески станка-качалки. Широкое распространение данного вида оборудования обусловлено его простотой, оперативным получением первичной информации — динамограммы и возможностью здесь же, на месте, определения основных неисправностей СШНУ или причин недостаточной эффективности работы установки. К недостаткам данного вида оборудования относятся низкая точность и достоверность информации, субъективность в оценке и расшифровке динамограмм, остановка станка-качалки для установки динамографа, большие затраты времени и ручного труда операторов по исследованию скважин, особенно при сложных погодно-климатических условиях, невозможность телемеханизации и телеавтоматизации процесса динамометрирования, затруднение в сборе и обработке полученной информации с помощью ЭВМ. В настоящее время в нефтяной промышленности при технической диагностике СШНУ широкое распространение получили микропроцессоры. Одним из частных видов динамограмм является ваттметрог-рамма — рис. 7.75 [25]. Под ваттметрограммой (см. рис. 7.75) понимается график изменения электрической мощности, потребляемой электроприводом станка-качалки за цикл качания. Циклические ваттметрограммы электропривода станка-качалки несут информацию как о глубинной части насоса, так и о наземной. Метод контроля по ваттметрограммам основан на сравнении формы кривой, снятой на данной скважине при нормальном режиме ее работы (при первоначальном запуске, после проведения ремонта, при условии, что ее параметры, такие как число качаний, длина хода плунжера насоса, положение уравновешивающих грузов в период после снятия исходной ваттметрограммы не менялись). Еще одним направлением определения работоспособности машин и механизмов является вибродиагностика [23].
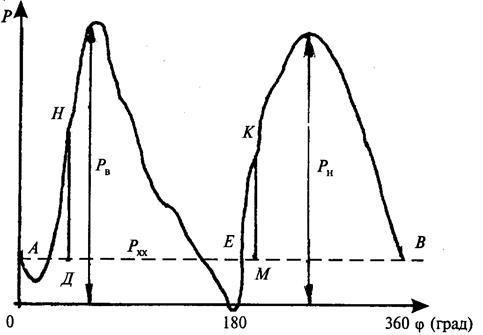
Рис. 7.75. Теоретическая ваттметрограмма нормальной работы СШНУ
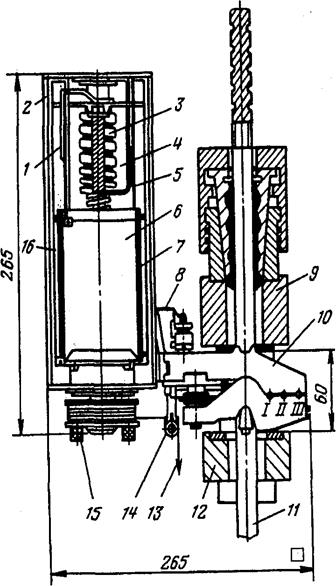
Рв — максимальная мощность при нагрузке от веса половины столба жидкости в трубах и силы трения подземном оборудовании; Рн — макси мальная мощность при нагрузке от веса уравновешенного груза и силы трения в подземном оборудовании; Рхх — мощность холостого хода электропривода станка-качалки; АЕ — ход устьевого штока вверх; ЕВ — ход устьевого штока вниз; АД — расстояние штанг плюс сокращение штанг; ЕМ— расстояние труб плюс сокращение штанг; ДЕ — ход плунжера вверх; MB — ход плунжера вниз Теоретические и экспериментальные исследования показывают, что по характеристикам вибрации можно получить довольно обширную информацию о состоянии механизма. Разработаны различные методики анализа характеристик и соотнесение их с конкретными взаимодействующими рабочими парами. Рассмотрим например работу опорного подшипника. В новом подшипнике при малом зазоре частота колебаний низкая, амплитуда колебаний мала. По мере износа подшипника растут частота и амплитуда колебаний, что может служить диагностирующим фактором. Таким образом, с помощью аналитических зависимостей можно установить характер изменений параметров вибрации в процессе износ машин. К преимуществу вибродиагностики можно отнести определение неисправного узла в сложной системе диагностики. Одним из недостатков вибродиагнос тики является выбор места расположения датчика, так как в различные точки корпуса редуктора сигналы от различных соударяющихся кинематических пар могут приходить в различных фазах и изменять общий уровень сигнала. Динамограмма снимаемая на поверхности всегда имеет искажение от сил трения, упругости колонны штанг, упругости колонны штанг и т.д. Поэтому поверхностные динамограммы полезно сравнивать с плунжерной скважинной динамограммой. Скважинные плунжерные динамограммы получают с помощью глубинного динамографа. Рассмотрим конструкцию глубинного гидравлического динамографа ДГТ-1С-360Г [21]. Глубинный динамограф (рис. 7.76) состоит из двух частей: гидравлического датчика усилий и записывающего устройства. Гидравлический датчик усилий расположен в нижней части динамографа и состоит из цилиндрической серьги 1, цилиндра 6, пальцев 4 и 5, переводника 7 и уплотнительных колец 11. Цилиндрическая серьга в нижней части имеет муфту для соединения динамографа со штангой, а верхней части окна для пальцев 4 и 5. исключения возможности его перекоса в процессе работы. Поршень 3 служит для преобразования усилия сжатия, действующих в штанговой колонне, в давление масла в полости М. Длина поршня 3 выбрана с учетом выполнения в нем окна для пальцев 4 и 5 исключения возможности его перекоса в процессе работы. В теле цилиндра имеются окна 10, через которые серьга соединена с поршнем при помощи пальцев 4 и 5. Длина окна 10 выбрана из расчета обеспечения движения пальцев 4 и 5 на длину рабочего хода поршня 3 с некоторым запасом хода для компенсации объемных изменений масла в полости М от нагрева или утечек в условиях скважин. Фиксация верхнего пальца относительно нижнего осуществляется при помощи установочного винта 14. С обоих концов цилиндра 6 выполнены резьбы для соединения датчика усилий с переводником 7 и для закрытия заглушкой 2. Переводник 7служит для соединения датчика усилий с записывающим устройством динамографа. Полость М цилиндра 6, заключенная между переводником 7и верхним торцом поршня 3, служит рабочей камерой датчика усилий и заполняется машинным маслом. Продольное отверстие К в переводнике выполняет функцию гидравлического канала связи камеры с рабочей камерой М. Полость цилиндра 6, ограниченная нижним торцом поршня 3 и заглушкой 2, образует воздушную камеру, благодаря чему торец поршня изолирован от окружающей Среды. В качестве записывающего устройства Динамографа применяются глубинные манометры типа МГГ или MГП. Записывающая часть заключена в корпусе 9 который имеет резьбу для присоединения снизу к переводнику 7 и вверху к полумуфте 9, предназначенной для присоединения динамографа со штанговой колонной. Сжимающие усилия, действующие на низ штанговой колонны в месте установки динамографа, передаются через цилиндрическую серьгу 1, пальцы 4 и 5 поршню 3, который, перемещаясь вверх, сжимает масло в рабочей камере М. Изменение давления масла в рабочей камере М передается через гидравлический канал связи К в камеру, где размещен сильфон 13 геликсного манометра, и преобразующий механизм увлекает перо, которое регистрирует давление на фольге. Перемещение каретки с фольгой осуществляется часовым механизмом типа 270 4П-Б. Глубинная динамограмма получаемая с помощью ДГТ-2С-360Г является наиболее достоверной и полной о рабочем состоянии глубинного насоса, но такая система диагностики является сложной и дорогой, как в монтаже, так и в эксплуатации. Основной недостаток данного устройства заключается в том, что для получения динамограммы необходимо произвести спуско-подъем оборудования.
Рис. 7.76. Динамограф глубинный гидравлический ДГГ-1С-360Г
На промыслах наиболее распространен переносной гидравлический динамограф ГДМ-3 Рис. 7.77, технические характеристики которого приведены ниже.
Верхний предел измерения усилий, кН...................................100 Погрешность измерения усилий, %..............................................2 Верхний предел измерения перемещения, м............................3,3 Погрешность измерения перемещения, %...................................2 Число масштабов измерения усилий............................................3 Число масштабов (1:15, 1:30, 1:45) измерения перемещения.....3 Размер поля динамограммы, мм...........................................50x75 Размер диаграммной ленты, мм.........................................1000x85 Габаритные размеры прибора в футляре, мм............320x350x120 Масса прибора с футляром, кг......................................................8 Масса прибора без футляра, кг.....................................................5
Динамограф состоит из силоизмерительного устройства и самописца с ходоуменыпителем, смонтированных в одном блоке. В силоизмерительное устройство входят два рычага-вилки и гидравлическая мессдоза (трансформатор давления), которая встроена в верхний рычаг и представляет собой полость, заполненную жидкостью и перекрытую мембраной из тонкой листовой латуни. К нижней стороне мембраны прилегает поршень, который передает на нее усилия, возникающие при работе динамографа, и создает в полости мессдозы давление жидкости, пропорциональное приложенному усилию [27, 21].
Рис. 7.77. Гидравлический динамограф ДГ-3 1 — стрелка с пером; 2 — корпус самописца; 3 — геликоидальная манометрическая пружина; 4 — возвратная пружина ходоуменьшителя; 5 — винт ходоуменьшителя; 6 — столик; 7— ведомый ролик; 8 — капиллярная трубка; 9 — верхняя траверса; 10 — силоизмерительное устройство; 11 — верхняя штанга (устьевой шток); 12 — нижняя траверса канатной подвески; 13—- шнур; 14— направляющий ролик; 15— сменный мерный шкив; 16 — ведущий ролик
Рычаги силоизмерительного устройства 10 вставляются между траверсами канатной подвески так, что вся нагрузка, воспринимаемая верхней траверсой 9, передается через них на нижнюю 12. При этом верхний рычаг опирается на нижний в двух точках: через стальной шарик, установленный на поршне мессдозы и через цилиндрический ролик, который закладывается в поперечные канавки на противоположной стороне рычагов. Переставляя этот ролик из одних канавок в другие, можно изменять масштаб измерения усилий (40, 80, 100 кН). Корпус самописца 2 укреплен при помощи кронштейна на верхнем рычаге силоизмерительного устройства. В верхней части самописца расположена геликоидальная манометрическая пружина 3, на оси которой закреплена стрелка с пером 1. Полость пружины сообщается с полостью мессдозы капиллярной трубкой 8. Изменение давления жидкости в гидравлической системе мессдозы — капилляр — геликоидальная пружина вызывает поворот стрелки с пером на угол, пропорциональный нагрузке в точке подвеса штанг. Конец пера касается цилиндрической поверхности столика б, по краям которого размещены ведущий 16 и ведомый 7 ролики с диаграммной бумажной лентой. Столик, в свою очередь, закреплен на каретке, которая перемещается по вертикальным направляющим при помощи ходоуменьшителя, повторяя в заданном масштабе возвратно-поступательное движение точки подвеса штанг. Механизм ходоуменьшителя состоит из ходового винта 5, ходовой гайки, неподвижно закрепленной на каретке, возвратной пружины 4 и сменного мерного шкива 15. На мерный шкив намотан шнур, свободный конец которого проходит через направляющий ролик 14 я укрепляется на устье скважины. Во время движения динамографа вместе с канатной подвеской вверх разматывающийся шнур вращает шкив и ходовой винт, при этом каретка со столиком передвигается в верхнее положение, а возвратная пружина взводится. При ходе подвески вниз возвратная пружина, вращая ходовой винт в обратную сторону, перемещает каретку в крайнее нижнее положение. Перемещение каретки можно менять, устанавливая мерные шкивы различного диаметра. Динамограф комплектуется двумя шкивами, которые обеспечивают масштабы измерения перемещений 1:30, 1:45. Изменение перемещения в масштабе 1:15 обеспечивается мерным шкивом, постоянно соединенным с ходовым винтом. Выбор того или иного масштаба определяется длиной хода устьевого штока: при длине хода до 1,2 м применяется масштаб измерения 1:15, до 2,1 м — 1:30 и до 3,5 м — 1:45. Самописец динамографа снабжен также специальным устройством для перемещения диаграммной ленты без остановки станка-качалки. Технология динамографирования. Перед динамографированием тарированный прибор ДГ-3 подготавливается к работе: — прибор заправляется диаграммной лентой; — перо заправляется чернилами; — проверяется нулевое положение пера; — прочерчивается нулевая линия. При подготовке динамографа к работе опорные ролики устанавливаются в зависимости от длины хода и нагрузки. Если нагрузка не известна, их следует установить сначала на наибольшую нагрузку, чтобы не перегрузить силоизмерительную часть прибора. В зависимости от типа канатной подвески монтаж динамографа производится следующим образом. При наличии канатной подвески типа ПКН: станок-качалка останавливается в крайнем нижнем положении; траверса подвески разводится при помощи имеющихся на ней двух подъемных винтов; в образовавшееся окно вводится силоизмерительная часть прибора, которая должна быть установлена центрично; после этого верхняя траверса плавно опускается на рычаги силоизмерительного устройства и станок-качалка пускается в работу. На канатной подвеске типа ПСШ: станок-качалка останавливается в нижнем положении, не доходящем до крайнего на 20—25 см; на крышку головки устьевого сальника устанавливается штангодержатель, обхватывающий устьевой шток. К конструкции штангодержателя предъявляются следующие требования: он должен надежно удерживать шток и не портить его поверхность. После монтажа штангодержателя станок-качалку пускают в работу на время, необходимое для разводки траверсы канатной подвески. Разводка происходит за счет того, что штангодержатель упирается в крышку головки устьевого сальника и удерживает в неподвижном состоянии устьевой шток вместе с верхней траверсой, а нижняя траверса с канатом движется относительно штока. В образовавшееся окно вводится силоизмерительная часть динамографа, станок-качалка растормаживается и нижняя траверса плавно возвращается в исходное положение. Далее станок-качалка останавливается для демонтажа штангодержателя, а затем запускается в работу. После монтажа динамографа в канатной подвеске следует вручную прочертить линию веса штанг. Для этого станок-качалка останавливается в крайнем нижнем положении, когда его балансир не перешел нижнюю мертвую точку. Отметив линию веса штанг, перо поднимается со столика с бумагой и СК запускается в работу. На ходу, в течение первых нескольких качаний, регулируется ход столика динамографа таким образом, чтобы при крайнем верхнем положении балансира храповик ведущего ролика не доходил на несколько миллиметров до его шестерни. После этого свободный конец приводного шнура закрепляется на устье скважины так, чтобы обеспечивалась параллельность с устьевым штоком. Динамограмма записывается в результате опускания пера при помощи арретира на столик динамографа. Динамограмму следует записывать после выхода скважины на прежний режим, изменение которого было связано с предыдущей остановкой для монтажа прибора в канатной подвеске. После записи динамограммы прочерчивается линия суммарного веса штанг и жидкости. Для этого СК останавливается в крайнем верхнем положении, когда балансир не перешел верхнюю мертвую точку. Необходимо, не запуская скважины, эту линию прочертить через 5—7 мин повторно, чтобы установить, наличие утечек. После снятия динамограммы прибор демонтируется, определяется число полных качаний станка-качалки и оформляется динамограмма. При оформлении динамограммы должны быть зафиксированы следующие данные: дата динамографирования, номер скважины, номер динамографа, положение ролика между силоизмерительными рычагами, тип станка-качалки, длина хода устьевого штока, число качаний балансира в минуту, масштаб измерения перемещения.
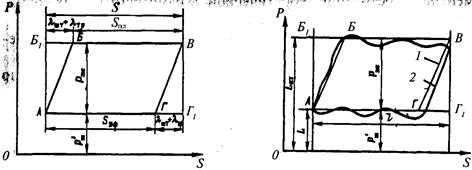
Рис. 7.78. Теоретическая (1) и фактическая (2) динамограммы
Теоретическая динамофамма. Простейшая теоретическая динамограмма нормальной работы штангового насоса имеет форму параллелофамма (см. рис. 7.78). Она строится для условий, когда насос исправен и герметичен, цилиндр насоса заполнен несжимаемой жидкостью, пофужение насоса под динамический уровень равно нулю, в насосной установке не возникают динамические нагрузки, коэффициент наполнения насоса равен единице. Процесс восприятия нагрузок штангами изображается наклонной линией АБ. Отрезок Б1Б соответствует в масштабе перемещений сумме деформаций штанг и труб. Прямая БВ, параллельная оси абсцисс, отвечает максимальной статической нагрузке у точки подвеса за ход вверх. Процесс разгрузки штанг в условиях полного заполнения цилиндра несжимаемой жидкостью протекает аналогично процессу восприятия нагрузки и изображается линией ВГ, параллельной АБ. Дальнейшему движению устьевого штока вниз при постоянной нагрузке, равной весу штанг в жидкости минус силы трения, соответствует прямая ГА. Действительная динамофамма работы штангового насоса отличается от теоретической в основном из-за влияния сил инерции и колебательных процессов в колонне штанг. Вследствие влияния сил инерции динамофамма оказывается повернутой на некоторый угол по часовой стрелке, а продольные колебания в колонне штанг вызывают волнообразное изменение нагрузки на устьевой шток. Для полного и правильного чтения динамограммы необходимо выявить все факторы, влияющие на работу насоса. Для этого на основе практической динамограммы производят расчет элементов и построение теоретической динамограммы и их совмещение. Этот процесс называется обработкой динамограммы. Построение теоретической динамограммы выполняется следующим образом (см. рис. 7.78). Измерение нагрузки в точке подвеса штанг производится по вертикали, проведенной перпендикулярно к нулевой линии динамограммы, которая прочерчивается перед монтажом динамографа на канатной подвеске. Нагрузка Р определяется по формуле
P = Lp, (7.98) где L — расстояние по вертикали от нулевой линии до точки, где измеряется нагрузка, мм; р — масштаб усилий динамографа, кг/мм. Масштабом усилий называется величина нагрузки на устьевой шток, вызывающей отклонение пера самописца по вертикали на 1 мм. Масштаб усилий можно найти и после динамометрирования из выражения
где Lo — расстояние от нулевой линии до линии веса штанг, мм. Для точного определения масштаба усилий динамограф следует периодически тарировать. Тарировку можно производить на универсальной тарировочной машине или гидравлическим прессом для всех трех масштабов измерения усилий. Перемещения по динамограмме измеряются по горизонтали как расстояния между перпендикулярами, проведенными к нулевой линии через заданные точки динамограммы. Для измерения фактического перемещения необходимо знать масштаб перемещений т, представляющий собой отношение длины хода устьевого штока S к длине динамограммы l (линия АГ1 или Б1В) т = S/1 (7.100) Для построения расчетной динамограммы необходимо подсчитать статическую нагрузку, вес колонны штанг и деформацию труб и штанг. Статическая нагрузка определяется по формуле
где Рж — вес жидкости над плунжером насоса;
где Fпл— площадь сечения, плунжера, м2; Нд — динамический уровень жидкости, м; рт — плотность жидкости в подъемных трубах, кг/м3; Р'ш — вес колонны штанг в жидкости;
где А = (рш - рт)/рш,
Для нанесения линии веса штанг на динамограмму (см. рис. 7.78) определяется ее удаление от нулевой линии из выражения
Отложив величину L0 на перпендикулярах,проводят линию АГ1. Расстояние линии статической нагрузки от нулевой лини подсчитывается по формуле
Отложив Lct на вертикальной оси динамограммы, проводят горизонтальную линию Б1В. Линия восприятия нагрузки АБ находится отложением на линии Б1В величины деформации труб и штанг в масштабе. Деформация труб и штанг определяется по формуле.
Величина отрезка, соответствующего значению деформации труб и штанг, составляет Б1Б=λ/т. (7.108) Отложив на линии веса штанг линию Г1Г = Б1Б и соединив точки А, Б, Г и В, определяют линию восприятия нагрузки АБ и линию снятия нагрузки В Г. На динамограмме линия Б1В представляет собой длину хода устьевого штока S, линия БВ — длину хода плунжера Sпл, а линия АГ — полезный или эффективный ход плунжера Sэф Из-за неполного заполнения цилиндра жидкостью линии БВ и АГ на практических динамограммах могут быть не равными. Используя соотношения этих величин в масштабе, можно определить коэффициенты подачи η и наполнения насоса β [21, 27, 28].
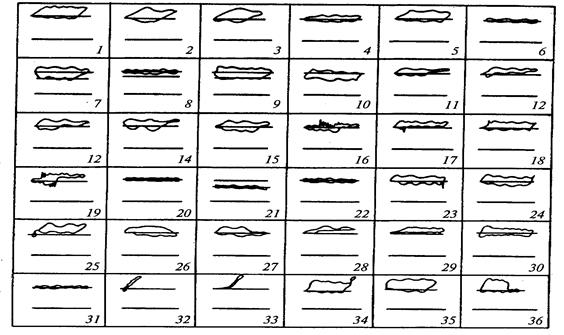
Практические динамограммы. В зависимости от параметров штанговой насосной установки практические динамограммы нормальной работы насоса имеют весьма разнообразные очертания (рис. 7.79). На форму динамограммы существенно влияют глубина спуска насоса, число качаний балансира, наличие свободного газа в цилиндре насоса, неисправность клапанных узлов и т.д. Так, с увеличением глубины спуска насоса увеличивается высота линии нагрузки при ходе вниз по отношению к нулевой линии, возрастает нагрузка от веса жидкости при сохранении отношения веса штанг к весу жидкости, на динамограмме укладывается меньшее число полуволн колебаний нагрузки. С увеличением числа качаний на динамограмме появляются затухающие волнообразные изменения нагрузки при ходе плунжера вверх и вниз. При наличии утечки жидкости в нагнетательной части насоса (см. рис. 7.79, динамограммы 4, 5) процесс восприятия нагрузки изображается линией, имеющей меньший угол наклона к горизонтали, чем линия восприятия нагрузки при нормальной работе насоса; правый верхний угол динамограммы закруглен; линия снятия нагрузки идет более круто и угол, образуемый ею и нулевой линией, имеет больший наклон. Характерные особенности динамограммы насоса, имеющего утечки в приемной части, следующие см. рис. 7.79, динамограмма 7: процесс снятия нагрузки изображается линией, угол наклона которой к нулевой меньше, чем у линии снятия нагрузки при нормальной работе насоса; левый нижний угол динамограммы закруглен; линия восприятия нагрузки идет более круто и угол между ней и нулевой линией имеет больший наклон. Если насосная установка имеет одновременные утечки в приемной и нагнетательной частях, то динамограмма имеет закругление левого нижнего и правого верхнего углов (см. рис. 7.79, динамограммы 9, 10).
Рис. 7.79. Практические динамограммы работы штангового насоса 1—3 — нормальная работа насоса; 4, 5 — утечки в нагнетательной части насоса; 6 — не работает нагнетательная часть насоса; 7 — утечки в приемной части насоса; 8 — не работает приемная часть насоса; 9, 10— одновременные утечки в приемной я нагнетательной части насоса; 11, 13 — влияние газа на работу насоса; 12— срыв подачи насоса газом; 14 — влияние газа и утечки в приемной части насоса; 15 — влияние газа и утечки в нагнетательной части насоса; 16— влияние газа и запаздывание посадки нагнетательного клапана; 17 — запаздывание посадки всасывающего клапана; 18— запаздывание посадки нагнетательного клапана; 19 —запаздывание посадки всасывающего и нагнетательного клапанов; 20— фонтанные проявления; 21 — обрыв (отворот) штанг; 22— обрыв (отворот) штанг у плунжера; 23 — удар штанг при ходе вниз; 24 — удар штанг при ходе вверх; 25 — низкая посадка плунжера; 26 — пропуск жидкости в конце хода плунжера вверх; 27 — сработка плунжерной пары; 28 — всасывающий я нагнетательный клапан забиты грязью; 29--низкая посадка плунжера, загрязнение клапанов; 30 — заедание плунжера в нижней части насоса; 31 — заклинивание плунжера во вставном насосе; 32 — заклинивание плунжера в невставном насосе; 33 —заклинивание плунжера в средней части насоса; 34 — высокая посадка плунжера; 35 — утечки в трубах;
Утечка жидкости из НКТ не придает динамограмме каких-либо специфических очертаний. Однако при помощи динамографирования можно установить ее наличие. Для этого при остановленном СК несколько раз прочерчивают линию максимальной нагрузки в течение 10—15 мин. Если эта линия при повторной записи не совпадает с первой, то имеют место утечки через НКТ. Динамограммы работы штангового насоса при откачке жидкости с газом имеют следующие характерные очертания (см. рис. 7.79, динамограммы 11—13): линия снятия нагрузки представляет собой кривую с той или иной кривизной, выпуклость которой обращена влево вверх; процесс снятия нагрузки протекает замедленно, вследствие чего открытие нагнетательного клапана происходит позже, чем при нормальной работе; левый нижний и правый верхний углы динамограммы острые; линии снятия и восприятия нагрузки параллельны. При низкой посадке плунжера снижение нагрузки и последующий набор этой нагрузки на динамограмме записывают по-разному. Если удар нерезкий, нагрузка снижается плавно, посадка плунжера записывается в виде петли в нижнем левом углу динамограммы (см. рис. 7.79, динамограмма 25). Линия восприятия нагрузки отодвигается вправо от своего нормального положения. Петля удара всегда располагается ниже линии веса штанг. При ударах плунжера полезная длина его хода уменьшается на длину горизонтальной проекции петли. При высокой посадке плунжера динамограмма имеет петлю в верхнем правом углу (см. рис. 7.79, динамограмма 34). Часто петля располагается выше линии статической нагрузки. Обрыв (отворот) штанг записывается на динамограмме в виде узкой горизонтальной замкнутой линии. Динамограмма совпадает с линией веса штанг, если обрыв произошел у самого плунжера (см. рис. 7.79, динамограмма 22. Чем выше глубина обрыва (отворота), тем меньше вес оставшейся части колонны штанг и тем ниже линии веса штанг располагается динамограмма (см. рис. 7.79, динамограмма 21). В настоящее время в нефтяной промышленности при технической диагностике ШСНУ широкое распространение получили микропроцессоры. Существует множество видов оборудования для диагностики и контроля за работой ШСНУ на базе микропроцессорных систем. Так, например, фирма «АТК» (г. Пермь) [21] предлагает систему, состоящую из стандартного геликсного динамографа, датчика давления и перемещения, который соединен со вторичными приборами, предназначенными для хранения и первичной обработки информации, а также для передачи этой информации в ЭВМ для обработки и анализа полученных данных. Фирма поставляет также программное обеспечение, позволяющее определить до 14 параметров системы «пласт — скважина — установка», такие как: динамический уровень, дебит скважины, нагрузка в точке подвеса колонны штанг, коэффициенты подачи и наполнения насоса и некоторые другие. Однако при всех своих достоинствах этот способ динамометрирования имеет свои недостатки. К ним в первую очередь относиться необходимость остановки станка-качалки для монтажа динамографа, подвеска полированного штока на специальном зажиме, ручной монтаж и демонтаж динамографа между траверсами канатной подвески станка-качалки, невозможность телемеханизации процесса динамометрирования. Подобное оборудование используется фирмой Dynapump (США) [21]. В этой системе геликсный динамограф заменен на электронные датчики давления, а персональный компьютер максимально приближен к скважине для оперативной обработки и анализа информации, а также выдача рекомендации по дальнейшей эксплуатации данной скважины. Система в целом мобильна и имеет ряд преимуществ перед ранее известными. К недостатком этой системы относится невозможность телемеханизации процесса диагностирования. Система фирмы «Dynapump» является усовершенствованной моделью систе мы фирмы «Nabra Corp» (США), которая была создана ранее для фирмы «Shell» (США). Как уже было отмечено, одним из основных недостатков всех рассмотренных систем диагностики работоспособности ШС'НУ является невозможность телемеханизации процесса диагностики. Этого недостатка лишены системы, разработанные фирмами «Mobil Oil Co» (США), «DELTA-X» (США), «Baker CAC» (США) [21, 30]. Система диагностики включает датчик нагрузки на колонне штанг, систему сбора данных и каналы от конечных устройств к ЭВМ. Система состоит из центрального, обрабатывающего информацию, комплекса и полевых компьютеров, обслуживающих группы скважин. Оценка технического состояния ШСНУ проводится по результатам последовательных замеров определенных параметров работы. Система применяется не только для диагностики, но и для оптимизации режима работы установок, анализа нагруженности колонны насосных штанг, работы станка-качалки и его уравновешенности. Другая система диагностирования ШСНУ разработана французкой фирмой «CIMSA» [21, 30] на базе микрокомпьютера «SYSTEP» и состоит из трех главных частей: — локальная система отбора и обработки данных; — центральная (диспетчерская) система; — система связи. Локальная система сбора данных выполняет следующие операции: — снятие и хранение динамограмм; — связь с диспетчерской. Локальная система не проводит диагностику, она передает следующие данные в центральную: — полную динамограмму скважины; — технологический номер скважины; — минимальные и максимальные значения нагрузки. Диагностика скважины в центральной диспетчерской происходит на ЭВМ с участием оператора. Преимущество системы в том, что она позволяет управлять как одной скважиной, так и группами скважин. Данная система включает в себя первичные датчики усилия, размещенные на траверсах канатной подвески СК, и углового перемещения, размещенного в подшипнике опоры балансира СК. Отличительной особенностью данной системы от предшествующих является постоянный контроль и анализ основных параметров работы системы «пласт — скважина — оборудование» с помощью ЭВМ. Система фирмы BAKER(CIIIA) типа ROD PUMP CONTRROLLER MODEL 8500 [21] предназначена только для наблюдения предельных величин нагрузки и состояния оборудования включено (отключено). К преимуществу данной системы можно отнести: — снижение эксплуатационных расходов; — простота в эксплуатации; — экономия электроэнергии. Американская фирма «Technical Oil Tool Corporation» (TOTCO) [38] выпускает автоматические системы контрольно-измерительной аппаратуры для нефтегазодобывающих установок. Новая система «Datakc» для контроля, измерения и управления добычей, а также для сбора и обработки данных, о работе промысловой установки состоит из полевой станции, системы связи и центральной станции сбора и обработки данных. Полевая станция включает в себя дистанционный терминал, представляющий собой микрокомпьютер, который выполняет операции контроля, измерения, связи и управления на месте промысловой установки. На терминал поступает сигнал с аналоговых, дискретных и частотных датчиков, доступные для обслуживающего персонала на месте установки, ежедневно автоматически или при поступлении соответствующей команды передаются на центральную станцию обработки данных. КОМПАНИЯ «ЭХОМЕТР» (США) [21, 30] предлагает комплексную систему исследования работы скважин SPE-24060. Для количественного динамометрического анализа необходимы данные высокой степени точности, для получения которых требуется использование калиброванного датчика. Отслеживание движения полированного штока может осуществляться несколькими способами. Традиционно, положение полированного штока регистрируется вращательно-перемещающимся датчиком. Преимущество этой системы состоит в высокой скорости обработки данных компьютером и чувствительности к ускорению датчика нагрузки. Последнее возможно благодаря использованию очень компактного акселерометра на интегральной схеме, который встроен в элемент измерения нагрузки. Таким образом необходим только один кабель для соединения компьютера и датчика нагрузки/ускорения.
|
||||
|
|
Последнее изменение этой страницы: 2016-08-26; просмотров: 1423; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.188.137.209 (0.014 с.) |



 (7.99)
(7.99) (7.101)
(7.101) (7.102)
(7.102) (7.103)
(7.103) (7.104)
(7.104) (7.105)
(7.105) (7.106)
(7.106) (7.107)
(7.107) (7.109)
(7.109) (7.110)
(7.110)