Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Индивидуальные механические приводыСодержание книги
Поиск на нашем сайте
В нефтедобывающей промышленности наибольшее распространение получили приводы штангового скважинного насоса механического действия. Как все приводы, так и механические бывают индивидуальные и групповые. Основное применение в настоящее время имеют индивидуальные механические приводы. Они используются по их прямому назначению, т.е. как привод насоса, работающего в одной скважине. Кроме того, бывает, что этот же привод одновременно является приводом других нефтепромысловых механизмов, как, например, лебедки для подземного ремонта, насоса для закачки жидкости в скважину, подвесного компрессора для откачки газа из скважины и т.д. Использование индивидуального привода насосов одновременно для других промысловых механизмов не всегда рационально, так как, во-первых, конструкция привода усложняется, а во-вторых, глубинный насос и дополнительный механизм будут работать в одном режиме. Таким образом, при создании оптимального режима работы насоса дополнительный механизм будет работать не в оптимальном режиме, и наоборот. Индивидуальные механические приводы выполняются по различным принципиальным схемам в зависимости от конструктивного назначения. В основном они состоят из двух видов механизмов: для снижения скорости вращения вала двигателя до числа ходов точки подвеса штанг; для преобразования вращательного движения звена со сниженным числом оборотов в возвратно-поступательное движение точки подвеса штанг. Первая группа механизмов будет названа трансмиссией или передачей вращательного движения, вторая группа — преобразующим механизмом. Особое влияние на работу и конструкцию привода насоса оказывает принципиальная кинематическая схема преобразующего механизма. По видам преобразующих механизмов механические приводы насосов делятся на две группы: балансирные и безбалансирные. В балансирном приводе вертикальное возвратно-поступательное движение точки подвеса штанг осуществляется посредством качающегося балансира (коромысла), а в безбалансирных приводах механического действия это движение осуществляется разными другими механизмами без применения качающегося балансира. В нефтепромысловой практике балансирные индивидуальные приводы называют станками-качалками. Кроме трех общих параметров (максимальные значения: нагрузки в точке подвеса штанг Рmax, длины хода Smax и числа ходов nmax), индивидуальные механические приводы характеризуются еще максимальным допустимым значением крутящего момента Мmax на валу ведущего звена преобразующего механизма (то же самое, что и на ведомом валу трансмиссии). Так что максимальное значение этого момента является одним из основных параметров механических индивидуальных приводов.
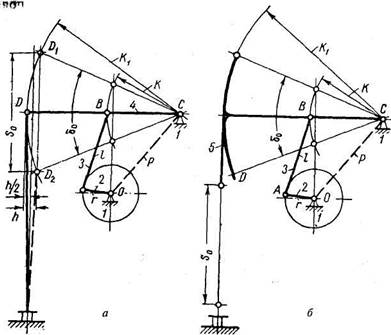
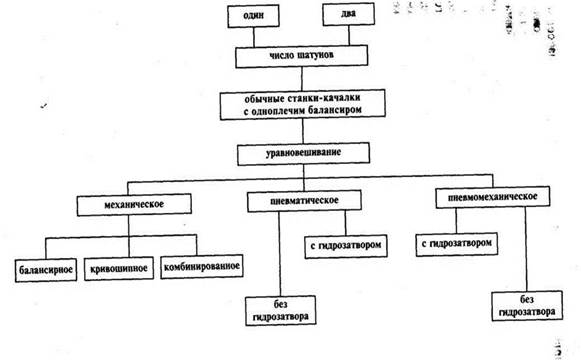
По величине крутящего момента индивидуальные механические приводы могут быть классифицированы следующим образом (кгс*м): приводы с малым моментом при Мс < 1000 со средним при 1000 < Мс < 3000 с большим при 3000 < Мс < 6000 со сверхбольшим при Мс > 6000 Между крутящим моментом и параметрами Ртax, S и n существует определенная аналитическая зависимость. Общая классификация механических приводов насосов представлена на рис. 7.5. Существуют многочисленные конструкции станков-качалок, выполненные по различным кинематическим — схемам как трансмиссии, так и преобразующего механизма. Балансиры станков-качалок на практике встречаются двух видов: как механизм двуплечего рычага (рычаг первого рода), так и механизм одноплечего рычага (рычаг второго рода). По этому признаку все балансирные индивидуальные приводы (станки-качалки) могут быть подразделены на две группы: станки-качалки с двуплечим балансиром и одноплечим балансиром [9]. В станках-качалках с двуплечим балансиром (рис. 7.6) опора С качения балансира BD находится между точкой подвеса штанг D и точкой В сочленения балансира с шатуном 3. Применяемые станки-качалки в основном созданы по этой схеме. В станках-качалках с одноплечим балансиром точка сочленения В шатуна 3 с балансиром DC находится между точкой подвеса штанг D и опорой балансира С. Соединение станка-качалки (т.е. конца его балансира) с колонной штанг (с точкой подвеса штанг) производится двояко — непосредственно шарнирно (см. рис. 7.6, а и 7.7, а) или посредством гибкой связи 5 (см. рис. 7.6, б и 7.7, б). В первом случае штанга подвешивается непосредственно к концу балансира в точке D, которая описывает дугу D1DD2 радиусом K1 (см. рис. 7.6, а и 7.7, а). Общее отклонение оси сальникового полированного штока OD от вертикальной оси скважины (или от оси сальника) будет равно величине стрелы h сегмента D1DD2 Такое отклонение оси сальникового штока отрицательно влияет на работу сальникового устройства. По этой причине такое соединение головки балансира станка-качалки с точкой подвеса штанг в настоящее время почти не применяется. Гибкое звено 5 в сочетании с дугообразной головкой балансира представляется прямолинейно направляющим механизмом. При этом конец балансира (головка балансира) выполняется так, что при работе станка-качалки гибкое звено 5, закрепленное одним концом в верхней части головки и другим концом к сальниковому штоку, всегда огибает дугу радиусом К1 Таким образом, обеспечиваются прямолинейное движение точки подвеса штанг D и нормальная работа сальникового устройства. Почти во всех станках-качалках в качестве преобразующего механизма используется четырехзвенный шарнирный кривошипно-коромысловый механизм. Имеются также станки-качалки, в которых в качестве преобразующего применяются другие виды механизмов. Учитывая, что в нефтяной промышленности в основном применяются станки-качалки с четырехзвенным кривошипно-коромысловым преобразующим механизмом, будем называть их обычными станками-качалками. На рис. 7.8. представлена классификация механических балансирных приводов скважинных штанговых насосов (станков-качалок) [9].
Рис. 7.5. Общая классификация механических приводов
Рис. 7.6. Кинематическая схема обычных станков-качалок с одноплечим балансиром: а — с шарнирной головкой; б — с другой головкой
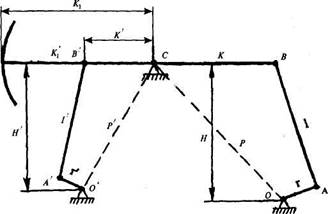
Рис. 7.7. Сравнительная схема станков-качалок с двуплечим и одноплечим балансиром: а — с шарнирной головкой; б — с дуговой головкой
В последние годы на нефтепромыслах страны стали появляться станки-качалки с перенесенным вперед четырехзвенным механизмом, в которых шарнирный четырехзвенник расположен между скважиной и опорой балансира. Такие приводы принято называть станками-качалками с одноплечим балансиром. В числе основных достоинств подобных станков-качалок — компактность по сравнению с обычными станками-качалками при одинаковых параметрах. На рис. 7.9 представлена совмещенная сравнительная схема механизма с двуплечим и одноплечим балансиром.
Рис. 7.8. Классификация механических балансирных приводов скважинных штанговых насосов
Рис. 7.9. Сравнительная схема станков-качалок с двуплечим и одноплечим балансиром
Рис. 7.10. Общая классификация уравновешивания привода скважинного штангового насоса Для механизма с одноплечим балансиром параметры обозначены индексом-штрихом. В приводах с двуплечим балансиром отношение переднего и заднего плеч балансира обычно составляет k1/k = 1,0—1,2 и даже в вышедших из применения станках-качалках не превышало 1,4—1,5. Из схемы на рис. 7.9 видно, что при одноплечих балансирах отношение k1, выполняющего роль переднего плеча, kk’ (заднее плечо) существенно больше, т.к. длина заднего плеча составляет лишь часть длины переднего плеча балансира. Поэтому во втором случае одним и тем же кривошипом можно получить намного больший ход головки балансира или, при одинаковой длине хода, сократить габариты станка-качалки по сравнению с обычной. При этом все основные геометрические отношения звеньев остаются теми же (r/l = r'/l’, r/k = r'/k'). Одновременно решается проблема ограничения массы кривошипов, противовесов и установки в целом, т.к. сокращается и потребная длина фундамента. Фактически в станках-качалках с механическим уравновешиванием отношение k1 k' составляет не очень большую величину, т.к. из стремления получить другие преимущества точка В’ сопряжения шатунов с траверсой (с балансиром) переносится ближе к головке балансира. Применение кинематической схемы с одноплечим балансиром позволяет улучшить динамические характеристики станка-качалки, т.е. уменьшить динамические нагрузки и смягчить вибрации насосных штанг; при этом кривошипы должны вращаться против часовой стрелки при устье скважины слева от наблюдателя (для обычных станков-качалок наоборот) [9]. В числе недостатков рассматриваемых станков-качалок пониженная боковая устойчивость, затрудненность обслуживания и ремонта, повышенная опасность обслуживания приводов с кривошипным уравновешиванием вследствие того, что скважина оказывается между кривошипами. Условия уравновешивания станков-качалок с одноплечим балансиром позволяют применять в них фигурные кривошипы. Схема станка качалки является очень удобной для применения пневматического, гидравлического или комбинированного уравновешивания, которые используются в тяжелых мощных установках. В этих случаях соответствующий цилиндр помещается между траверсой и головкой балансира. Цилиндр может быть неподвижным, когда он крепится к основанию, а шток поршня к балансиру, или подвижным, если сам крепится к балансиру, а шток к основанию. Система уравновешивания получается сложной, т.к. помимо цилиндропоршневой группы требуется целый комплекс оборудования. Например, при пневматическом уравновешивании с гидрозатвором необходимы компрессор, ресивер, масляный компенсационный насос, емкость с маслом и др. (рис. 7.10). В конструкциях с чисто механическим уравновешиванием траверса обычно располагается не в средней части балансира, а переносится ближе к головке балансира, чем обеспечивается определенный эффект. Известны индивидуальные механические приводы и групповые приводы для эксплуатации нескольких скважин. Приводы первого типа включают двигатель, трансмиссию — преобразующий механизм, и обеспечивают движение только одной колонны насосных штанг. В настоящее время почти все приводы, СШНУ относятся к этому типу. Приводы второго типа служат для эксплуатации нескольких (от 2 до 40) скважин, расположенных близко друг от друга и имеющих сопоставимые параметры. Групповой привод использовался для эксплуатации малодебитных скважин и в настоящее время не применяется. В индивидуальном механическом приводе трансмиссия уменьшает частоту вращения вала двигателя до числа оборотов, соответствующего числу двойных ходов точки подвеса штанг. Механизм для преобразования вращательного движения выходного звена трансмиссии в возвратно-поступательное движение точки подвеса колоны штанг обеспечивает кинематическую связь, уравновешивающего устройства с точкой подвела штанг. Трансмиссия, используемая в индивидуальном приводе, обычно состоит из ременной передачи от двигателя к входному валу редуктора. Редуктор выполняется двух- или трехступенчатым с зубчатыми зацеплениями различных типов. Наибольшее влияние на конструкцию установки оказывают тип и кинематическая схема преобразующего механизма. По видам преобразующих механизмов механические приводы делятся на две группы: балансирные и безбалансирные. В первых возвратно-поступательное движение точки подвеса штанг достигается использованием качающегося рычага — балансира, который соединяется с выходным валом трансмиссии посредством кривошипно-шатунного механизма. В свою очередь кривошипно-шатунный механизм может быть со звеньями имеющими постоянную или переменную длину, изменяющуюся в пределах времени одно цикла работы установки. В безбалансирных приводах возвратно-поступательное движение точки подвеса штанг обеспечивается за счет использования механизмов с гибкими элементами (канаты или цепи). Рассмотрим основные типы механических индивидуальных приводов с точки зрения их кинематических схем. Тип кинематической схемы определяется конструкцией балансира, исполняемого в виде двуплечного или одноплечного рычага.
Балансирные станки-качалки
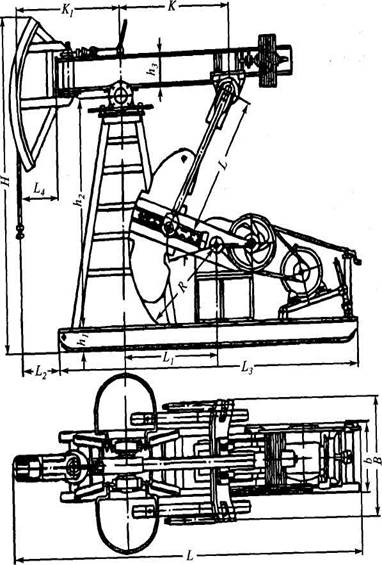
Станки-качалки с двуплечным балансиром. В этой конструкции опора балансира находится между точками подвеса штанг и сочленения балансира с шатуном. Усилия к балансиру передается через шатун соединенные с балансиром траверсой. Стандартом 1966 г. было предусмотрено 20 типо-размеров станков-качалок (СК) грузоподъемностью от 1,5 до 20 т (см. табл. 7. 1) [10].Типовая конструкция СК представлена на рис. 7.11. Впервые в стране был начат выпуск приводов, в которых редуктор был поднят и установлен на подставке. При создании размерного ряда учитывалась унификация узлов и элементов с той целью, чтобы свести к минимуму разнообразие быстроизнашивающихся узлов и тем самым упростить изготовление, ремонт, обслуживание и снабжение оборудования запасными элементами. Для этого из 20 типов станков-качалок 9 — были выполнены как базовые, а остальные 11 — в виде их модификаций. Модификации заключались: 1) в изменении соотношений длин переднего и заднего плеч балансира путем замены головки балансира или всего балансира, что приводило к изменению грузоподъемности и длины хода станка-качалки; 2) в применении редуктора с другим крутящим моментом- 3) в одновременной замене балансира и редуктора. Фактически в серийный выпуск пошли только 9 моделей, включая 7 базовых и 2 модифицированных. Условное обозначение на примере 4СКЗ-1,2-700 расшифровывается следующим образом: 4СК — станок-качалка 4 — базовой модели; 3 — допускаемая нагрузка на головку балансира 3 т; 1,2 — наибольшая длина хода точки подвеса штанг 1,2 м; 700 — допускаемый крутящий момент на редукторе 700 кгс*м. Начиная с этого стандарта, в числе важнейших параметров стал регламентироваться крутящий момент редуктора вместо числа качаний балансира. Основные типоразмеры СК, выпускаемых по разным стандартам, приведены в таблице 7.1—7.12. Указанные станки-качалки имеют редукторы следующих типов (см. табл. 7.7). В условных обозначениях редукторов указано: Ц — цилиндрический; 2 — двухступенчатый; Н — нормального ряда; С — суммарное осевое расстояние в мм; Ш — шевронное зацепление (этот признак был положен в основу отличия станков-качалок с одинаковыми параметрами).
Рис. 7.11. Схема станка-качалки по ГОСТ 5866-66
|
||||
|
|
Последнее изменение этой страницы: 2016-08-26; просмотров: 1544; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.119.255.183 (0.008 с.) |