Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Определение видимости дороги и конкретной видимости при наличии света фар встречного транспортного средстваСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
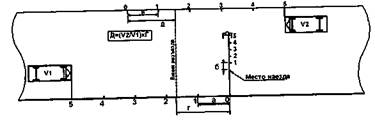
Подготовительный этап Помимо мероприятий, перечисленных выше, подготовительный этап включает установление ряда дополнительных данных. По встречному транспорту: • тип ТС (автомобиль легковой, грузовой, трактор, мотоцикл и т.п.); • скорость движения; • полоса движения; • характеристика включенного света (дальний, ближний, подфарники, прожектор и т.д.). Если встречных ТС было несколько, то сведения по вышеизложенному перечню нужно иметь о каждом из них, а также о дистанции между ними. По транспортному средству, совершившему наезд: • скорость движения; • характеристика включенного света; • полоса движения; • место наезда; • место разъезда со встречным транспортным средством, которое может совпадать с местом наезда (см. рис. 2.6—2.9) либо располагаться как перед местом наезда (см. рис. 2.10-2.13), так и за ним (см. рис. 2.14—2.17). На участке проведения эксперимента, предварительно огражденном постами милиции, отмечается место наезда. Линией или вешками отмечается место разъезда (место, где передние части ТС находились на одной линии). Исходя из скоростей движения ТС, встречного (V2), совершившего наезд (V1) и объекта (V3) определяют путь, проходимый ими за одну секунду. Разметку участков пути в одну секунду для ТС, совершившего наезд, производят от места наезда в направлении, противоположном направлению его движения. После произведенной таким об разом разметки можно определить время, которое было затрачено ТС, совершившим наезд, на преодоление пути (С1) от места разъезда до места наезда.
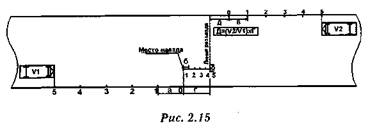
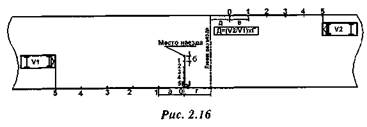
Рис. 2.9 Условные обозначения: а — расстояние, которое преодолевает транспортное средство, совершившее наезд, за одну секунду; б — расстояние, которое преодолевает пешеход за одну секунду; в — расстояние, которое преодолевает встречное транспортное средство за одну секунду Рис. 2.13 Условные обозначения: а — расстояние, которое преодолевает транспортное средство, совершившее наезд, за одну секунду; б — расстояние, которое преодолевает пешеход за одну секунду; в — расстояние, которое преодолевает встречное транспортное средство за одну секунду; г — расстояние, которое преодолевает транспортное средство, совершившее наезд, с момента разъезда со встречным транспортным средством до момента наезда; д — расстояние, которое преодолевает встречное транспортное средство с момента разъезда с транспортным средством, совершившим наезд, до момента наезда
Очевидно, что в течение такого же времени двигалось и встречное ТС. Поэтому его положение от места разъезда будет определяться расстоянием, определяемым по формуле
где С2 — расстояние от линии разъезда, на котором находилось встречное ТС в момент наезда; С1 — расстояние от линии разъезда до места наезда; vi — скорость автомобиля, совершившего наезд; V2 — скорость встречного автомобиля. Таким образом, передняя часть встречного ТС в момент наезда будет находиться на расстоянии С2 за линией разъезда. От этой точки в направлении, противоположном направлению движения встречного ТС, размечают участки (так же, как и в предыдущем случае). Примеры разметки участка проведения эксперимента по определению видимости дороги и конкретной видимости подвижного объекта при наличии встречного транспорта показаны на рис. 2.6—2.17. При этом следует отметить, что в нижеприведенных примерах рассматриваются ситуации, когда наезд был совершен без торможения. В случаях совершения наезда в процессе торможения ТС, разметка участка проведения эксперимента должна проводиться с участием специалиста-автотехника. Ход эксперимента Встречное ТС передней частью устанавливается на границе участка № 5 с учетом полосы движения, которую оно занимало. Транспортное средство, совершившее наезд, и объект, конкретная видимость которого определяется, устанавливаются соответственно на границы 5-х участков местом первоначального контакта, также с учетом полос движения, которые они занимали. С этого положения фактически наблюдается состояние видимости, которое существовало за 5 с до момента наезда. С учетом света фар ТС определяется расстояние видимости дороги с места водителя ТС, совершившего наезд. Как правило, возможность видеть объект в этот момент отсутствует. Далее ТС перемещаются в начала участков № 4, № 3 и т.д., и снова производится измерение видимости дороги и конкретной видимости объекта. Необходимость последовательного определения видимости дороги на границах участков обусловлена тем, что по мере сближения ТС величина видимости дороги, как правило, сокращается.
Определение видимости дороги и конкретной видимости объекта производится так же, как и при отсутствии встречного ТС. Если встречных ТС было несколько, то их следует перемещать, выдерживая дистанцию, соответственно с ТС, в отношении которых проводился эксперимент. Если будет установлено, что в каких-нибудь точках на пути сближения ТС какое-либо из них меняло режим света, то это обстоятельство необходимо учесть в ходе эксперимента. Следует также помнить о необходимости поддерживать число оборотов двигателя ТС в режимах, соответствующих их скорости движения.
Условные обозначения: а — расстояние, которое преодолевает транспортное средство, совершившее наезд, за одну секунду; 6 — расстояние, которое преодолевает пешеход за одну секунду; в — расстояние, которое преодолевает встречное транспортное средство за одну секунду; г — расстояние, которое преодолевает транспортное средство, совершившее наезд, с момента наезда до разъезда со встречным транспортным средством; д — расстояние, которое преодолевает встречное транспортное средство с момента наезда до разъезда с транспортным средством, совершившим наезд
|
||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-12; просмотров: 896; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.17.5.44 (0.011 с.) |