Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Тахогенераторы постоянного токаСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
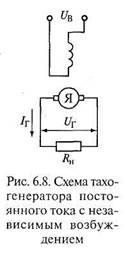
Тахогенераторы постоянного тока — это небольшие генераторы постоянного тока чаще с возбуждением тока при помощи постоянных магнитов, реже — с независимым возбуждением (рис. 6.8). Конструктивно они не отличаются от обычных машин постоянного тока малой мощности. Выходное напряжение тахогенератора UГ может быть выражено так же, как напряжение обычного генератора постоянного тока через ЭДС якоря ЕГ, падение напряжения в обмотке якоря IГrГ и падение напряжения на щеточном контакте Δ Uщ:
где I г — ток в обмотке якоря; rГ — сопротивление обмотки якоря. Выразим ЭДС якоря через магнитный поток Ф и частоту вращения n:
а ток якоря — через напряжение на выходе UГ и сопротивление нагрузки RH (см. рис. 6.8):
и, подставив (6.2), (6.3) в (6.1), получим
где cЕ — постоянная, определяемая конструктивными параметрами генератора.
Используя (6.4), найдем окончательное выражение для выходного напряжения:
Если пренебречь падением напряжения на щеточном контакте (принять Δ U щ = 0), то выражение (6.5) примет вид
При постоянных потоке Ф, сопротивлениях якоря rГ и нагрузки RH
где величина
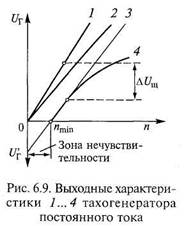
есть крутизна выходной характеристики тахогенератора. При Ф = const, r Г = const и RH = const крутизна к постоянна и выходная характеристика тахогенератора (рис. 6.9) является прямой линией. У современных тахогенераторов постоянного к она находится в пределах от 3 до 100 мВ/(об/мин). Чем больше сЕ, Ф, RH и меньше rГ, тем больше крутизна выходной характеристики. Наибольшая крутизна имеет место при холостом ходе тахогенератора, когда RH = ∞(см. прямую 1 на рис. 6.9):
Чем меньше сопротивление нагрузки RH, тем меньше крутизна выходной характеристики (см. прямую 2 на рис. 6.9). Влияние сопротивления щеточного контакта на выходную характеристику легко установить, анализируя равенство (6.5). При Δ Uщ ≠0, что бывает в реальных тахогенераторах, выходная характеристика UГ = f(n) пересекает ось ординат (при n = 0) не в начале координат, а в точке U г ’ = Δ Uщ /(1 + r г /RH) (см. прямую 3нарис. 6.9).
За счет падения напряжения на щеточном контакте у тахогенератора постоянного тока появляется зона нечувствительности — зона частот вращения от n = 0 до n = nmin, при которых выходное напряжение U гравно нулю. Границу зоны нечувствительности легко найти из выражения (6.5), считая U г = 0:
В целях уменьшения зоны нечувствительности необходимо тщательно подбирать щетки, чтобы они обеспечивали минимальное падение напряжения Δ UЩ. В обычных тахогенераторах устанавливают медно-графитовые или серебряно-графитовые щетки, а в прецизионных тахогенераторах особенно ответственных систем автоматики — проволочные щетки с серебряным, золотым или даже платиновым покрытием.
Влияние реакции якоря в тахогенераторах постоянного тока проявляется в виде искажения выходной характеристики. Если тахогенератор рассчитан так, что он работает на изгибе магнитной характеристики (рис. 6.10), то при малом сопротивлении нагрузки RH вследствие значительного тока I г и его увеличения с ростом n магнитный поток Ф тахогенератора не остается постоянным. Из-за размагничивающего действия реакции якоря магнитный поток с увеличением скорости уменьшается, что приводит к уменьшению крутизны k выходной характеристики, которую можно записать в виде
изменению ее вида (см. кривую 4 на рис. 6.9) и появлению скоростной амплитудной погрешности, составляющей у современных тахогенераторов 0,5...3 %.
Сельсины
В современной технике очень часто возникает необходимость синхронизации вращения или поворота различных осей механизмов, находящихся на значительном расстоянии друг от друга и механически между собой не связанных. Эта задача чаще всего решается с помощью электрических систем синхронной связи. Синхронной связью называется такая электрическая связь, которая обеспечивает одновременное вращение или одновременный поворот двух или нескольких механически несвязанных, находящихся на расстоянии друг от друга осей механизмов. В технике получили распространение два основных вида систем синхронной связи: система электрического вала (синхронного вращения) и система передачи угла (синхронного поворота). Системы синхронного вращения применяются там, где требуется осуществить синхронное вращение двух или нескольких находящихся на расстоянии друг от друга осей механизмов, имеющих значительные моменты сопротивления. Синхронное вращение осуществляется с помощью обычных электрических машин, чаще всего трехфазных асинхронных двигателей с фазным ротором. Обмотки роторов двигателей в этом случае соединяются друг с другом, обмотки статоров питаются от одной и той же сети трехфазного тока. Системы синхронного поворота применяются для дистанционного управления, регулирования или контроля. Чаще всего синхронный поворот осуществляется с помощью небольших индукционных электрических машин — трехфазных или однофазных сельсинов. Трехфазные сельсины конструктивно не отличаются от обычных асинхронных машин с фазным ротором. Простейшая трехфазная система синхронной связи представляет собой соединение двух одинаковых сельсинов: приемника и датчика. Сельсины включаются в сеть переменного тока своими первичными обмотками, которыми могут быть как обмотки статора, так и обмотки ротора (обычно первичной является обмотка статора). Концы соответствующих фаз вторичных обмоток обоих сельсинов соединяются друг с другом (рис. 6.11). В зависимости от порядка следования фаз приемника и датчика сельсины вращаются в одном или разных направлениях. Наибольшее распространение в настоящее время получили системы передачи угла, осуществляемые с помощью однофазных сельсинов. Однофазные сельсины — это обычно индукционные машины, которые имеют однофазную обмотку возбуждения и трехфазную обмотку синхронизации. На рис. 6.12 представлена схема однофазного контактного сельсина с обмоткой возбуждения на статоре и трехфазной обмоткой синхронизации на роторе.
В схемах автоматики используются две принципиально отличные друг от друга системы синхронной передачи угла: индикаторная и трансформаторная. Индикаторная система синхронного поворота применяется там, где момент сопротивления на ведомой оси мал или совсем отсутствует (ось нагружена стрелкой или шкалой). В индикаторной системе сельсин-приемник самостоятельно отрабатывает угол, задаваемый сельсином-датчиком. Трансформаторная система синхронного поворота применяется там, где на ведомой оси имеется значительный момент сопротивления. В трансформаторной системе принимающий сельсин (сельсин-приемник) отрабатывает задаваемый сельсином-датчиком угол не самостоятельно, а с помощью механически и электрически связанного с ним исполнительного двигателя. Сельсины выпускаются как на промышленную частоту 50 Гц, так и на повышенные частоты 400, 500 Гц.
|
||
|
|
Последнее изменение этой страницы: 2016-06-26; просмотров: 707; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.01 с.) |