Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Основные типы двигателей Асинхронные микродвигателиСодержание книги
Поиск на нашем сайте
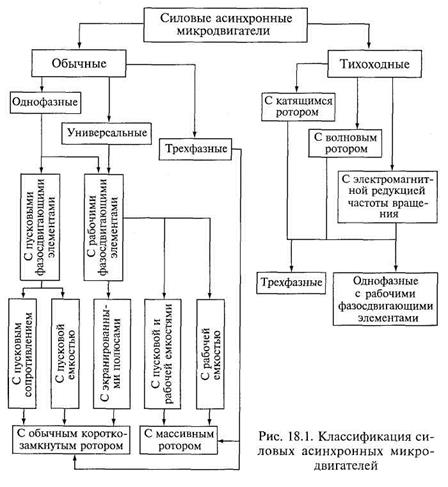
Самыми распространенными силовыми микродвигателями автоматики в настоящее время являются асинхронные двигатели. По своему устройству это двигатели с короткозамкнутым ротором, который чаще всего имеет обмотку, изготовленную в виде беличьей клетки. Реже ротор изготовляется массивным и полым из чугуна или стали, что делается либо для получения мягких механических характеристик, либо ради достижения особой механической прочности ротора, необходимой при высоких частотах вращения, либо с целью уменьшения акустического шума при работе двигателя. Асинхронные двигатели с фазовым ротором не выпускаются. Классификация силовых асинхронных микродвигателей представлена на рис. 18.1. В качестве силовых двигателей в схемах автоматики очень часто применяются трехфазные и однофазные асинхронные микродвигатели широкого применения, рассчитанные на работу от сети с частотой 50 Гц. Так как механическая мощность асинхронного двигателя практически (при прочих равных условиях) прямо пропорциональна частоте питающего напряжения (Р ~ Мп ~ Мпс ~ M60f/p ~ f), а габаритные размеры определяются значением вращающего момента М, то в схемах автоматики очень часто применяют асинхронные двигатели, рассчитанные на работу от напряжений повышенной частоты f.
Применение асинхронных двигателей повышенной частоты в целом ряде случаев диктуется не только стремлением уменьшить габариты машины, но и рядом других соображений: необходимостью иметь более высокие угловые скорости вращения, работой автоматических систем от сетей повышенной частоты и др. В ряде схем автоматики возникает обратная задача — необходимость получения малых частот вращения п. У асинхронных и синхронных двигателей переменного тока средних и больших мощностей этого можно легко достичь за счет увеличения числа пар полюсов p, так от этого зависит как синхронная частота вращения пс:
Для двигателей малых мощности и габаритных размеров этот способ практически неприемлем, особенно если они рассчитаны на работу от сетей повышенной частоты. При малых габаритах увеличение числа пар полюсов p, а следовательно, и числа пазов двигателя весьма затруднительно, а иногда и невозможно. С целью получения низких частот вращения приходится применять специальные тихоходные двигатели либо с электромагнитной редукцией частоты вращения, либо с катящимся или волновым роторами. В большинстве схем автоматики силовые двигатели питаются не от трехфазных, а однофазных сетей переменного тока. Именно поэтому в качестве силовых в основном используются однофазные двигатели. Трехфазные двигатели в схемах автоматики используются значительно реже. Однофазные асинхронные двигатели по своему устройству в подавляющем большинстве случаев являются двухфазными. Они, как правило, имеют на статоре две обмотки, сдвинутые в пространстве на 90°. Одна обмотка называется рабочей, или главной. Она подключается непосредственно к однофазной сети. Другая обмотка называется пусковой, или вспомогательной. Она подключается к однофазной сети через фазосдвигающий элемент либо только на время пуска, либо постоянно. В некоторых двигателях вспомогательная обмотка вообще не подключается к сети, а ЭДС в ней наводится потоком главной обмотки. В зависимости от типа фазосдвигающего элемента, а также от способа использования вспомогательной (пусковой) обмотки силовые однофазные асинхронные (и синхронные) микродвигатели можно разделить на пять групп: с пусковым сопротивлением; пусковым конденсатором; пусковым и рабочим конденсатором; рабочим конденсатором; экранированными полюсами. Кроме однофазных микродвигателей в системах автоматики в качестве силовых используются также универсальные асинхронные микродвигатели, которые, являясь по своему назначению трехфазными, при изменении схемы соединения обмоток — фаз и включении фазосдвигающих элементов могут работать и от однофазных сетей переменного тока.
Синхронные микродвигатели
Основной особенностью синхронных микродвигателей, определяющей области их применения, является постоянство частоты вращения при неизменной частоте f питающей сети. Частота вращения ротора двигателя в синхронном режиме (при M сопр < М mах) не зависит от колебаний напряжения питания и момента сопротивления. Она равна частоте вращения магнитного поля, т.е. синхронной частоте вращения:
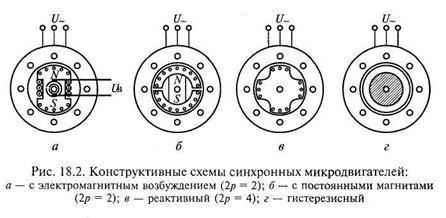
В настоящее время в схемах автоматики синхронные микродвигатели применяются очень широко. По конструктивному исполнению они весьма разнообразны, особенно однофазные микродвигатели малых мощностей (от долей ватт до нескольких ватт). Двигатели с номинальной мощностью от десятков до сотен ватт имеют обычное классическое исполнение. Они состоят из неподвижной части — статора, в пазах которого размещается трехфазная или двухфазная обмотка переменного тока, и вращающейся части — ротора, который у большинства двигателей имеет явно выраженные полюсы. В зависимости от конструкции ротора различают синхронные микродвигатели с электромагнитным возбуждением, постоянными магнитами, реактивные и гистерезисные. На рис. 18.2 представлены основные конструктивные схемы синхронных микродвигателей. Кроме двигателей обычного исполнения в схемах автоматики иногда встречаются обращенные синхронные микродвигатели, обмотка переменного тока которых размещается в пазах ротора. Микродвигатели с электромагнитным возбуждением (с обмоткой возбуждения постоянного тока на полюсах) вследствие сложности их конструкций и пуска, а также необходимости наличия источника постоянного тока для питания обмотки возбуждения в схемах автоматики применяются очень редко. Синхронные микродвигатели выпускаются как на промышленную частоту 50 Гц, так и на повышенные частоты 400, 500, 1000 Гц. Кроме обычных двигателей в схемах автоматики широко применяются тихоходные двигатели с электромагнитной редукцией частоты вращения, работающие на зубцовых гармониках поля, и двигатели с катающимся или волновым роторами. Иногда для получения низких частот вращения используются обычные двигатели со встроенными редукторами. Выпускаются несколько серий синхронных микродвигателей, которые широко применяются в приборах звуко- и видеозаписи, кино- и фотоаппаратуре, системах связи, всевозможных лентопротяжных устройствах и т. п.
К синхронным микродвигателям предъявляются как общие для всех электрических машин требования — высокие энергетические показатели (n и cosφ), малые габариты, масса и т.п., так и специфические для синхронных двигателей требования, которые зависят от схемы, в которой применяется двигатель. В одних схемах от двигателя требуется постоянство средней частоты вращения, в других — постоянство мгновенной частоты вращения в пределах одного оборота ротора и т. п. Кроме синхронных микродвигателей непрерывного вращения нашли применение импульсные шаговые двигатели.
|
||||
|
|
Последнее изменение этой страницы: 2016-06-26; просмотров: 534; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.147 (0.006 с.) |