Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Электромашинные преобразователиСодержание книги
Поиск на нашем сайте
Общие сведения
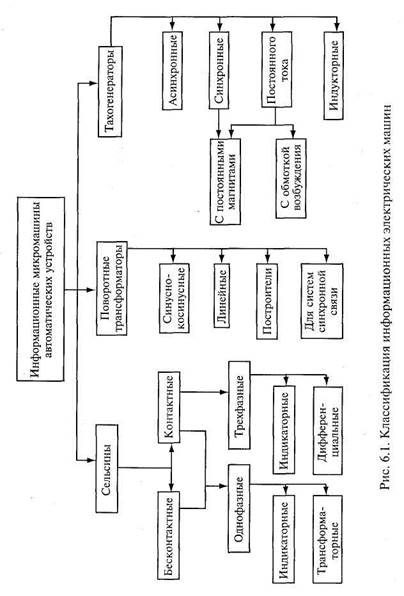
Основное требование, предъявляемое к информационным электрическим машинам автоматических устройств — высокая точность преобразования электрических или механических входных величин (сигналов управления) соответственно в механические или электрические выходные величины, находящиеся в строго постоянной и вполне определенной функциональной зависимости от входной величины. Например, частота вращения n преобразуется в выходное напряжение U ВЫХ, что имеет место в тахогенераторах; величина угла поворота α — в значения выходных напряжений, изменяющихся по вполне определенному закону в зависимости от а, что имеет место во вращающихся трансформаторах, сельсинах, магнесинах и т.п. К информационным электрическим машинам не предъявляется строгих требований в отношении их энергетических показателей (КПД, cos φ), как это имеет место в обычных силовых (энергетических) машинах. Эти требования здесь отступают на второй план, не являясь основными. Информационные машины весьма разнообразны как по устройству, принципу действия, роду тока, так и по функциям, которые они выполняют в схемах автоматики. Укрупненная классификация информационных электрических машин представлена на рис. 6.1.
Тахогенераторы Тахогенераторами называются небольшие электрические машины, предназначенные для преобразования механического перемещения — вращения вала — в электрический сигнал — выходное напряжение. Основное требование, которое предъявляется к большинству тахогенераторов, — линейность выходной характеристики, т.е пропорциональность выходного напряжения UГ частоте вращения n (рис. 6.2):
где k, k1 — постоянные величины; α — угол поворота.
По роду тока можно различать тахогенераторы переменного и постоянного тока. Тахогенераторы переменного тока могут быть асинхронными и синхронными. Тахогенераторы постоянного тока могут быть либо с постоянными магнитами, либо с электромагнитным возбуждением (с обмоткой возбуждения).
Тахогенераторы в схемах автоматики используются для следующих целей: измерения скорости вращения. В этом случае выходное напряжение подается на вольтметр, шкала которого отградуирована в об/мин; осуществления обратной связи по скорости в следящих системах; осуществления электрического дифференцирования: UГ = k1(d α /dt); осуществления электрического интегрирования:
Основные требования, предъявляемые к тахогенераторам: высокая линейность выходной характеристики — минимальное отклонение ее от прямой UГ = kn, являющейся идеальной выходной характеристикой тахогенератора; большая крутизна выходной характеристики k = UГ / n, мВ/(об/мин); симметрия выходного напряжения: UГ(+n) = UГ(-n); минимальное значение нулевого напряжения UГ при n = 0 (у тахогенераторов переменного тока) и минимальная зона нечувствительности (у тахогенераторов постоянного тока); максимальная выходная мощность при минимальной потребляемой мощности; минимальная пульсация выходного напряжения (у тахогенераторов постоянного тока); минимальное изменение фазы выходного напряжения (у тахогенераторов переменного тока); малый момент инерции ротора и малый момент сопротивления; стабильность выходной характеристики при изменении окружающих условий; малые габаритные размеры и масса; высокие показатели надежности (ресурс, интенсивность отказов и др.). К тахогенераторам, предназначенным для разных целей, предъявляются различные требования. Так, к тахогенераторам, обеспечивающим обратную связь по скорости и демпфирование следящих систем, предъявляются повышенные требования по крутизне выходной характеристики и мощности выходного сигнала. Линейность выходной характеристики для них не играет существенной роли.
К тахогенераторам, предназначенным для выполнения операций дифференцирования и интегрирования, наоборот, предъявляются повышенные требования в отношении линейности, точности, стабильности характеристик, в то время как значение мощности выходного сигнала и крутизна выходной характеристики здесь не являются определяющими факторами. Рассмотрим более подробно работу тахогенераторов как дифференцирующих и интегрирующих элементов. Для дифференцирования какой-либо функции необходимо вращать ротор тахогенератора — поворачивать его на углы а, пропорциональные данной функции. Выходное напряжение при этом будет прямо пропорционально производной заданной функции:
В тех случаях, когда производная заданной функции должна быть представлена в виде угловой величины, необходимо использовать специальную схему (рис. 6.3, а), состоящую из асинхронного тахогенератора (AT), элемента сравнения (ЭС), усилителя (У), исполнительного двигателя (ИД), редуктора (Р), линейного поворотного трансформатора (ЛПТ). Частота вращения ЛПТ пропорциональна производной d α /dt. Для интегрирования заданной функции по времени (рис. 6.3,6) нужно преобразовывать ее в электрическое напряжение U(t) и вращать ротор тахогенератора так, чтобы его выходное напряжение UГ(t) в любой момент времени компенсировало напряжение U(t). Тогда угол поворота ротора тахогенератора будет пропорционален интегралу заданной функции по времени:
|
||
|
|
Последнее изменение этой страницы: 2016-06-26; просмотров: 707; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.3 (0.006 с.) |