Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Раздел I классификация и общие характеристики элементов автоматикиСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте Глава 1 КЛАССИФИКАЦИЯ ЭЛЕМЕНТОВ АВТОМАТИКИ
Основные понятия
Любое автоматическое устройство представляет собой комплекс отдельных конструктивных или схемных элементов, каждый из которых выполняет задачу по преобразованию энергии, полученной от предыдущего элемента, и передаче ее последующему элементу. Элементами автоматики называются конструктивно законченные устройства, выполняющие определенные самостоятельные функции преобразования сигнала (информации) в системах автоматического управления и контроля. На рис. 1.1, а схематически изображен элемент Э. На его вход подается энергия х, после преобразования ее по значению на выходе возникает энергия у. Иногда необходимо, чтобы энергия у на выходе была больше, чем энергия х на входе; в этом случае в элемент вводится дополнительная энергия вида z (рис. 1.1, б). Очевидно, при наличии дополнительной энергии возможно усиление небольшой входной энергии х до большой выходной энергии у. Величины х и у могут быть электрическими (например, напряжение, ток, сопротивление) и неэлектрическими (например, давление, перемещение, температура, скорость). Чаще всего применяют электрические элементы, т. е. те, у которых величины х или у являются электрическими. Находят также применение и неэлектрические элементы: гидравлические, пневматические, механические и др. Характеристики элементов оказывают влияние на свойства систем автоматики, которые из них состоят. Изучение свойств этих элементов необходимо для анализа работы устройств и схем, основными показателями которых (характеризующими работу) являются точность, чувствительность, инерционность и др.
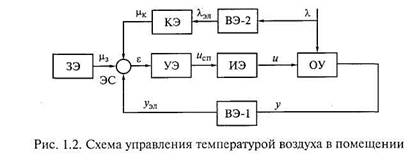
В настоящей главе рассматриваются функции, выполняемые различными элементами, классифицируются физические принципы, лежащие в основе их действия, и приводятся общие характеристики, применяемые для различных элементов автоматики. Рассмотрим схемы автоматики и телемеханики, а также основные правила их выполнения. Комплексы различных технических устройств и элементов, входящих в состав системы управления и соединенных электрическими, механическими и другими связями, на чертежах изображают в виде различных схем: электрических, гидравлических, пневматических и кинематических. Схема служит для получения концентрированного и достаточно полного представления о составе и связях любого устройства или системы. Согласно Единой системе конструкторской документации (ЕСКД) и ГОСТ 2.701 электрические схемы подразделяют на структурные, функциональные, принципиальные (полные), схемы соединений (монтажные), подключения, общие, расположения и объединенные. Структурная схема служит для определения функциональных частей, их назначения и взаимосвязей. Функциональная схема предназначена для определения характера процессов, протекающих в отдельных функциональных цепях или установке в целом. Принципиальная схема, показывающая полный состав элементов установки в целом и все связи между ними, дает основное представление о принципах работы соответствующей установки. Монтажная схема иллюстрирует соединение составных частей установки с помощью проводив, кабелей, трубопроводов. Схема подключения показывает внешние подключения установки или изделия. Общая схема служит для определения составных частей комплекса и способов их соединения на месте эксплуатации. Объединенная схема включает в себя несколько схем разных видов в целях более ясного раскрытия содержания и связей элементов установки. Чертежи и схемы выполняют по определенным правилам, которые изложены в действующих стандартах ЕСКД. Каждый функциональный элемент выполняет элементарную функцию, которая заключается в получении, преобразовании и передаче информации в виде сигналов определенной физической природы. Эти элементы в системах автоматики и телемеханики служат звеньями однонаправленного действия, т. е. звеньями, передающими сигнал в одном направлении — с входа на выход. Назначения основных функциональных элементов автоматики можно рассмотреть на примере построения одномерной системы комбинированного управления температурой воздуха в помещении (рис. 1.2).
На схеме этой системы объект управления (ОУ) — помещение, оборудованное калорифером. Для управления объектом предусмотрен исполнительный элемент (ИЭ), содержащий исполнительный механизм (сервопривод) и регулирующий орган (клапан). От положения и золотника клапана, перемещаемого сервоприводом, зависит расход теплоносителя через калорифер и, как следствие, температура воздуха в помещении у. Сигнал управления сервоприводом исп формируется управляющим элементом (УЭ) согласно заложенному в нем алгоритму по выходному сигналу элемента сравнения (ЭС): ε = ε 1 + ε2, причем
где μ3 - формируемый задающим элементом (ЗЭ) электрический сигнал, соответствующий требуемому значению температуры воздуха в помещении; уэл — формируемый первым воспринимающим элементом (ВЭ-1) электрический сигнал, соответствующий реальной температуре у воздуха в помещении; μк — выходной сигнал корректирующего элемента (КЭ); θД — положительная величина, представляющая собой постоянную времени дифференциатора, т.е. корректирующего элемента; λ эл — формируемый вторым воспринимающим элементом (ВЭ-2) электрический сигнал, соответствующий температуре λ. наружного воздуха. В рассматриваемой системе КЭ — реальное дифференцирующее звено (приближенно выполняющее операцию дифференцирования электрического сигнала λ эл по времени t), т.е. выходные сигналы μк корректирующего элемента пропадают с исчезновением изменений температуры наружного воздуха X. В противном случае сигналы КЭ могут содержать постоянные составляющие, определяемые установившимися значениями температуры X и воспринимаемые ЭС как сигналы ЗЭ. Другими словами, недопустимо наличие постоянных составляющих в выходных сигналах КЭ, так как эти составляющие формируют алгебраическое слагаемое сигнала задания системе управления. Однако сигнал задания ц3 системе управления должен формироваться оператором только с помощью ЗЭ. Наличие постоянных составляющих в выходных сигналах КЭ допустимо, если эти сигналы поступают непосредственно на вход ИЭ. В этом случае КЭ должен содержать необходимый усилитель мощности, приводящий ИЭ в действие, т. е. являться управляющим элементом. Аналогично строятся схемы для других систем управления. Как видно из рассмотренного примера, каждый элемент в системе управления выполняет вполне определенную функцию. По выполняемым функциям основные элементы автоматики делятся на датчики, усилители, стабилизаторы, реле, распределители, двигатели и другие узлы (генераторы импульсов, логические элементы, выпрямители и т.д.). По роду физических процессов, используемых в основе устройств, элементы автоматики делятся на электрические, ферромагнитные, электротепловые, электромашинные, радиоактивные, электронные, ионные и др. Рассмотрим некоторые основные элементы, наиболее часто применяемые в автоматике, разделяя их по выполняемым функциям. Датчик (измерительный преобразователь, чувствительный элемент) — устройство, предназначенное для того, чтобы информацию, поступающую на его вход в виде некоторой физической величины, функционально преобразовать в другую физическую величину на выходе, более удобную для воздействия на последующие элементы (блоки). Большинство датчиков преобразуют неэлектрическую контролируемую величину х в электрическую (например, температура преобразуется при помощи термопары в электродвижущую силу (ЭДС); механическое перемещение, связанное с изменением положения якоря электромагнита, изменяет индуктивность его обмотки и т.д.). Основной характеристикой датчика является зависимость его выходной величины у от входной х, т.е. у =f(x). На рис. 1.3 изображены некоторые распространенные виды зависимости выход-вход датчиков. Как видно из рисунка, функциональная связь может подчиняться любой закономерности, но желательно, чтобы характеристика датчика была линейной.
Различают два вида датчиков в зависимости от принципа производимого ими преобразования: параметрические (или пассивные), в которых изменение контролируемой величины х сопровождается соответствующими изменениями активного, индуктивного и емкостного сопротивлений датчика. Наличие постороннего источника энергии вида z (см. рис. 1.1, б) является обязательным условием работы параметрического датчика; генераторные (или активные), в которых изменение контролируемой величины х сопровождается соответствующими изменениями ЭДС на выходе датчика (например, возникновение ЭДС может происходить вследствие термо-, пьезо-, фотоэффекта и других явлений, вызывающих появление электрических зарядов). Эти датчики выполняются по схеме, приведенной на рис. 1.1, а, т.е. они не требуют дополнительного источника энергии вида г, так как энергия на выходе элемента полностью берется с его входа (вследствие чего мощность выходного сигнала всегда меньше мощности входного сигнала). В зависимости от вида контролируемой неэлектрической величины различают датчики механические, тепловые, оптические и др. Часто применяются электрические датчики с промежуточным преобразованием, т.е. механический датчик объединяют с электрическим. Преобразование контролируемой величины в таких датчиках происходит по схеме: измеряемая величина — механическое перемещение — электрическая величина. Элемент, преобразующий измеряемую величину в перемещение, называется первичным преобразователем или первичным измерителем (ПИ). Например, давление преобразуется в перемещение стрелки манометра ПИ, которое затем преобразуется в изменение активного сопротивления (проволочный, резистивный (или реостатный) датчики и др.). Усилитель — элемент автоматики, осуществляющий количественное преобразование (чаще всего усиление) поступающей на его вход физической величины (тока, мощности, напряжения, давления и т.п.). Усилитель обязательно должен иметь дополнительный источник энергии z (см. рис. 1.1, б). Основной характеристикой усилителя является зависимость y = f (x); при этом обычно стремятся к получению линейной или близкой к ней характеристики на рабочем участке. Величины на входе и выходе усилителя имеют одинаковую физическую природу. На рис. 1.4 изображены различные виды характеристики усилителей.
По принципу действия усилители разделяются на электронные, полупроводниковые, магнитные, электромашинные, пневматические, гидравлические. Стабилизатор — элемент автоматики, обеспечивающий постоянство выходной величины у при колебаниях входной величины х в определенных пределах. Эффект стабилизации достигается за счет изменения параметров элементов, входящих в схему стабилизатора; при этом вид энергии на его входе и выходе должен быть один и тот же. Характеристики стабилизаторов показаны на рис. 1.5. Здесь характеристика 1 обеспечивает меньшую стабилизацию выходной величины у, чем характеристика 2. В случае, если кривая не имеет в заданном диапазоне горизонтального участка, а имеет максимум (кривая 3) или минимум, то точность стабилизации будет больше, чем в случае, характеризуемом кривой 7. В зависимости от вида стабилизируемой величины различают стабилизаторы напряжения и тока, обеспечивающие постоянство напряжения или тока в нагрузке при колебаниях входного напряжения и сопротивления нагрузки. Реле — элемент автоматики, в котором при достижении входной величины х определенного значения выходная величина у изменяется скачком. Зависимость у = f(x) реле неоднозначна и имеет форму петли (рис. 1.6). При изменении входной величины от 0 до х2 выходная величина у изменяется незначительно (или остается постоянной и равной у 1). При достижении входной величины х значения х2, т.е. х = х2, выходная величина изменяется скачком от значения у1 до у2. Впоследствии при увеличении х выходная величина изменяется незначительно или остается постоянной (имеет установившееся значение). Когда входная величина уменьшается до значения х1 выходная величина сначала остается также неизменной и почти равной у2. В тот момент, когда х = х1 выходная величина скачком уменьшается до значения ух и сохраняется приблизительно неизменной при уменьшении х до нуля.
Скачкообразное изменение выходной величины у в момент, когда х = х2, называется величиной срабатывания (например, ток срабатывания, напряжение срабатывания для электрических реле). Скачкообразное изменение выходной величины у в момент, когда х = х1 называется величиной отпускания (ток отпускания, напряжение отпускания). Отношение величины хх к величине срабатывания х2 называется коэффициентом возврата, т.е. Kв = х1/х2. Так как обычно х 1 < х2, то Kв < 1. Существуют различные типы реле, но основными являются электромеханические реле (электромагнитные, магнитоэлектрические, электродинамические и др.), в которых изменение входной электрической величины вызывает замыкание или размыкание контактов. Бывают бесконтактные магнитные реле и бесконтактные реле электронного типа. Распределитель {шаговый искатель) — элемент автоматики, осуществляющий поочередное подключение одной величины к ряду цепей. При этом подключаемые цепи обычно электрические. Распределители используются при необходимости управления несколькими объектами от одного и того же управляющего органа и по способу передачи импульсов в управляемые цепи делятся на электромеханические (контактные), электронные и ионные (бесконтактные). Исполнительные устройства — электромагниты с втяжным и поворотным якорями, электромагнитные муфты, а также электродвигатели, относящиеся к электромеханическим исполнительным элементам автоматических устройств. Электромагниты преобразуют электрический сигнал в механическое движение; их применяют для перемещения рабочих органов, например клапанов, вентилей, золотников и т. п. Электромагнитные муфты используются в электроприводах и устройствах управления для быстрого включения и выключения приводимого механизма, а также для его реверса, т.е. изменения направления движения управляемого устройства. В некоторых случаях электромагнитные муфты применяют для регулирования скорости и ограничения передаваемого момента. Электродвигатель — это устройство, обеспечивающее преобразование электрической энергии в механическую и преодолевающее при этом значительное механическое сопротивление со стороны перемещаемых устройств. Одним из главных требований, предъявляемых к электродвигателям, является их способность развивать требуемую механическую мощность. Кроме того, электродвигатель должен обеспечивать реверс, а также движение объекта с заданными скоростями и ускорениями. Наиболее широко в качестве электромеханических исполнительных элементов применяют электродвигатели постоянного и переменного тока.
|
||
|
|
Последнее изменение этой страницы: 2016-06-26; просмотров: 1029; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.5 (0.012 с.) |