Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Поляризованные электромагнитыСодержание книги
Поиск на нашем сайте
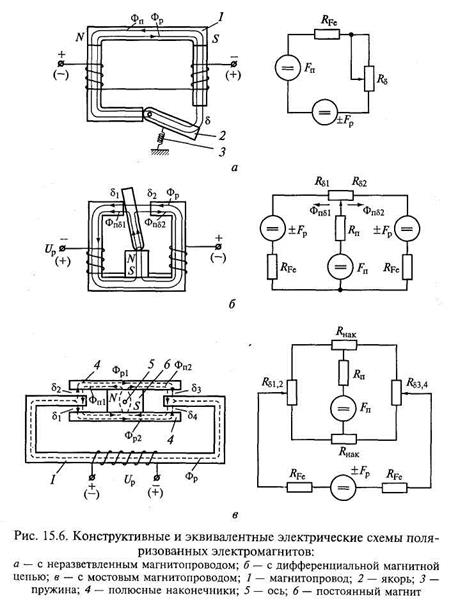
Принципиальное отличие поляризованных электромагнитов (ПЭМ) от нейтральных состоит в существовании зависимости между направлением перемещения якоря и полярностью управляющего напряжения Up, прикладываемого к рабочей обмотке. Эта зависимость достигается с помощью двух магнитных потоков: рабочего Фр, создаваемого постоянным напряжением, полярность которого может изменяться, и поляризующего Фп, образуемого постоянным магнитом или электромагнитом постоянного тока с неизменной полярностью питающего напряжения (рис. 15.6). Повышенное быстродействие ПЭМ (несколько миллисекунд) по сравнению с нейтральными ЭМ достигается не только конструктивными приемами (шихтованным магнитопроводом, небольшими ходом и массой якоря, малой постоянной времени обмотки), но и связано непосредственно с его принципом действия: при срабатывании и отпускании поток в магнитопроводе не возникает и не исчезает, а перераспределяется или изменяет свое значение. Еще одна особенность ПЭМ, обусловленная наличием постоянного магнита, заключается в возможности принятия якорем различных фиксированных положений при обесточенной рабочей обмотке. Различают три основные конструктивные схемы магнитопро-водов ПЭМ: последовательную, параллельную (дифференциальную) и мостовую. Схема ПЭМ с последовательной магнитной цепью, в которой рабочий поток Фр, создаваемый током рабочей обмотки, и поляризующий поток Фп постоянного магнита замыкаются в общем простом неразветвленном магнитопроводе 1, показана на рис. 15.6, а вместе с его схемой замещения (в схеме замещения предполагается, что магнитная цепь не насыщена). При встречном действии потоков Фр и Фп якорь 2 оттянут пружиной 3. Изменение полярности рабочего напряжения вызывает притяжение якоря к сердечнику.
На рис. 15.6, 6 представлена одна из принципиальных схем ПЭМ с дифференциальной (параллельной) магнитной цепью и соответствующей схемой замещения. Здесь поляризующий поток Фп разветвляется на два потока Фпδ1 и Фпδ2, проходящих по сердечникам. Один из них при данной полярности рабочего напряжения действует с потоком Фр согласно, а другой — встречно. Якорь притягивается к левому или правому полюсу в зависимости от того, в каком из зазоров δ1 или δ2 рабочий и поляризующий потоки суммируются. Тяговое усилие определяется разностью сил притяжения в зазорах δ1 и δ2 (откуда и название дифференциальный ПЭМ). При изменении полярности рабочего напряжения Up якорь перебрасывается к противоположному полюсу. Одна из конструктивных схем ПЭМ с мостовым магнитопроводом и соответствующая схема замещения изображены на рис. 15.9, в. Рабочий поток Фр, проходящий по С-образному магнитопрово-ду 1, разветвляется на два потока Фр1 и Фр2, а поляризующий поток Фп постоянного магнита 6 — на два потока Фп1 и Фп2. При данной полярности рабочего напряжения Up потоки Фп1 и Фр2 в зазоре δ1 и Фр1 и Фп2 в зазоре δ3 суммируются, а Фп1 и Фр1 в зазоре δ2 и Фп2 и Фр2 в δ4 вычитаются, вследствие чего постоянный магнит 6 с полюсными наконечниками 4 поворачивается на некоторый угол против хода часовой стрелки вокруг оси 5. Изменение полярности рабочего напряжения вызывает поворот магнита с полюсными наконечниками в обратном направлении. Основные недостатки ПЭМ с последовательной магнитной цепью — это, во-первых, малая магнитная проницаемость магнито-твердого материала постоянного магнита, из-за чего снижается чувствительность ПЭМ и требуется повышенная МДС рабочей обмотки, а во-вторых, воздействие размагничивающей рабочей МДС на постоянный магнит, что неблагоприятно сказывается на стабильности намагниченности последнего и увеличивает размеры ПЭМ.
Глава 16 ЭЛЕКТРОМАГНИТНЫЕ МУФТЫ
Классификация муфт
Передачу вращающего момента с ведущего входного вала (чаще всего вала приводного двигателя) на соосный ведомый входной вал (вал приводимого механизма, механической нагрузки) осуществляют с помощью муфт. Их классификация представлена на рис. 16.1. Первым классификационным признаком служит управляемость муфт, затем — род управляющей энергии, далее — характер связи входного и выходного валов и, наконец, — принцип управления. Для быстрого включения, выключения и реверса приводимых механизмов, а также для регулирования их скорости и ограничения передаваемого момента применяют различные управляемые сцепные муфты. К ним относится большая группа электромеханических муфт, т.е. муфт, в которых для передачи механического момента исполнительному механизму используют электрический сигнал. Так как мощность этого сигнала меньше развиваемой на ведомом валу, то электромеханическую муфту можно рассматривать как усилитель с коэффициентом усиления по мощности.
Коэффициент усиления по мощности
где М — электромагнитный момент муфты; Ω — установившаяся угловая частота вращения; U — напряжение питающей сети; I — установившееся значение тока в катушке. В муфте-усилителе электрический сигнал управляет мощностью, передаваемой от ведущего вала ведомому. Управляемые муфты по виду статической характеристики — зависимости скорости вращения ведомого вала от сигнала управления подразделяются на релейные и аналоговые. Первые после подачи сигнала управления осуществляют жесткое сцепление валов, а вторые — гибкое, при котором скорость ведомого вала связана плавной зависимостью с управляющим сигналом. Гибко сцепление позволяет в некоторых системах управления обойтись без управляемых исполнительных двигателей. Приводы с управляемыми муфтами обладают большим быстродействием из-за меньшего момента инерции муфт по сравнению с исполнительными двигателями. Управляемые электромеханические муфты применяют в регулируемых приводах в диапазоне мощностей от нескольких ватт и до десятков мегаватт. Рассмотрим несколько типов электромеханических муфт с электрическим управлением.
Фрикционные муфты
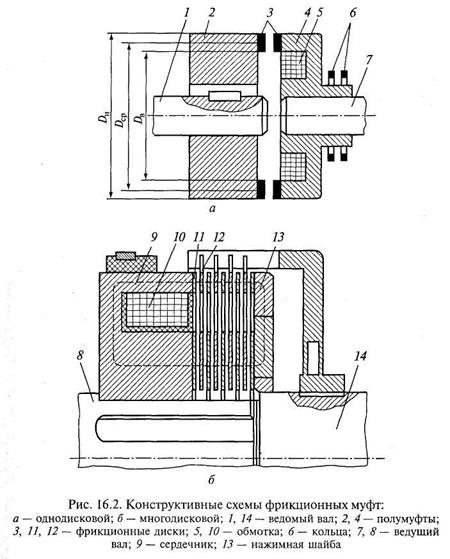
Фрикционные муфты (ФМ) предназначены в основном для жесткого сцепления валов. Гибкое соединение с их помощью возможно только путем импульсного управления, при котором частота вращения вала представляет собой функцию скважности импульсов напряжения, подаваемых на зажимы обмотки. Фрикционные муфты, или электромеханические муфты сухого трения, с механической связью (рис. 16.2) характеризуются большим разнообразием конструкций и схем управления. На рис. 16.2, а показана однодисковая нереверсивная ФМ, состоящая из двух цилиндрических полумуфт. На ведущем валу 7 жестко посажена полумуфта 4, являющаяся сердечником и ярмом электромагнита. Его якорем служит полумуфта 2, которая соединена с ведомым валом 1 скользящей посадкой и, следовательно, может перемещаться в осевом направлении. С помощью колец 6 и щеток на обмотку 5 подается управляющее напряжение. Возникающее тяговое усилие вызывает притяжение якоря (полумуфты 2) к сердечнику (полумуфте 4) и плотное сцепление фрикционных дисков 5из материалов с высоким коэффициентом трения (сталь — сталь, чугун — чугун, бронза — бронза, чугун — бронза, сталь — ферродо и др.), благодаря чему обеспечивается сцепление валов.
При обесточенной обмотке якорь оттягивается от сердечника пружиной (на рисунке не показана). Основное достоинство однодисковой ФМ — простота, однако с ростом передаваемого вращающего момента значительно увеличиваются ее размеры. Действительно, передаваемый муфтой момент, создаваемый силами трения фрикционных дисков, определяется по формуле
где m — число дисков; dN — сила прижатия дисков в элементарном слое 2π RdR; kTP — коэффициент трения; σдоп — допустимое удельное давление (kTP и σдоп для каждой пары материалов имеют свои значения); kR = RB/RH; RH, RB — соответственно наружный и внутренний радиусы дисков; DH — наружный диаметр диска ФМ. Следовательно, больший передаваемый момент связан с необходимостью увеличивать наружный диаметр диска DH. Если же в ФМ предусмотреть несколько фрикционных дисков (m > 2), то при прочих равных условиях DH существенно уменьшается с ростом m:
Одна из конструкций многодисковых ФМ показана на рис. 16.2, б, где фрикционные диски 11 соединены шлицами внутренней окружности с ведущим валом 8, а диски 12 с помощью шлицев на наружной окружности — с ведомым валом 14. При отключенной обмотке 10 чередующиеся диски 11 и 12 проскальзывают друг относительно друга. Подача управляющего напряжения обеспечивает прижимание дисков друг к другу вследствие притяжения к сердечнику 9 нажимной шайбы 13, являющейся якорем электромагнита. В результате возникает сцепление между дисками, необходимое для передачи заданного момента М. При заданном наружном диаметре DH фрикционной муфты можно найти число фрикционных дисков m для передачи требуемого вращающего момента М ведомому валу. Их немного (m = 6... 10), а значит, надежное и быстрое включение ФМ достигается при достаточно высоких значениях удельного давления на фрикционных поверхностях — 7,8...9,8 Па. Из рис. 16.2, б, где штрихами условно показана средняя силовая линия верхней половины ФМ, видно, что по отношению к нажимной шайбе 14 фрикционные диски представляют собой магнитные шунты, по которым замыкаются потоки рассеяния, ослабляющие силу притяжения. Чтобы магнитное сопротивление в радиальном направлении стало значительно больше, чем в осевом, в дисках сделаны вырезы, приводящие к образованию узких легко насыщающихся перемычек. Таким приемом удается ограничить поток рассеяния через каждый диск в среднем до 2...4 %. Обмотку ФМ обычно подключают к постоянному напряжению (или переменному через встроенный выпрямитель), чтобы использовать преимущества электромагнитов постоянного тока. Тяговое усилие, которое должен развивать электромагнит, можно найти из выражения
Для его создания в рабочем зазоре необходима магнитная индукция Bδ, значение которой можно определить из формулы Максвелла:
где Sδ — площадь поперечного сечения рабочего зазора. Чтобы провести рабочий поток через рабочий зазор, в соответствии со вторым законом Кирхгофа для магнитных цепей требуется МДС
где Нδ — напряженность магнитного поля в зазоре δ; I δ = 28Р — длина рабочего зазора. Для учета магнитного сопротивления магнитопровода и нерабочих зазоров найденное значение МДС увеличивают на 20... 30 %:
Площадь окна SOK для размещения обмотки электромагнита находят из соотношения
где k3 — коэффициент заполнения окна медью; j — допустимая плотность тока в обмотке. Окно выполняют прямоугольной формы с соотношением размеров в осевом и радиальном направлениях h/b = 2,5. После такого ориентировочного расчета уточняют размеры магнитопровода, параметры электромагнита и данные обмотки. Установившийся режим в приводах с электромагнитными муфтами наступает после окончания переходных процессов не только в муфте, но и в двигателе, и приводимом механизме. Поэтому переходные процессы рассматривают не собственно в муфте, а в системе двигатель—муфта—приводимый механизм. При анализе переходных процессов во время пуска привода с ФМ можно выделить три временных интервала. Время tB.JI выборки люфта δΔ = δ0 – δk, где δ0, δk — длина воздушного зазора соответственно в оттянутом состоянии якоря при I = 0 и притянутом состоянии, когда якорь переместился до начала соприкосновения фрикционных поверхностей. Другими словами, этот период охватывает время t тр + t дв1где t тр — время трогания якоря от подачи напряжения U на зажимы катушки до начала осевого движения якоря; t дв1— время осевого движения якоря до соприкосновения фрикционных поверхностей. Время t в.л определяется только параметрами ФМ. В этот период ведомый вал неподвижен, так как сцепления полумуфт еще нет. Время сцепления tcц = t дв2 — от момента соприкосновения до момента полного сцепления поверхностей трения. В это время диски проскальзывают друг относительно друга, пока еще не закончилось осевое движение якоря, а магнитный поток и электромагнитный момент продолжают расти. После начала вращения ведомого вала при М > Мс (Мс — момент сопротивления, создаваемый нагрузкой) частота вращения двигателя уменьшается, а частота вращения приводимого механизма увеличивается. Они становятся одинаковыми, когда наступает полное сцепление. Время t сц определяется параметрами не только ФМ, но и двигателя и приводимого механизма. Время жесткого разгона t ж р — от момента установления полного сцепления полумуфт до момента достижения установившегося значения частоты вращения. На этом этапе процесс протекает так же, как и при жестком соединении валов, и время t ж.р определяется только параметрами двигателя и приводимого механизма.
Ферропорошковые муфты
Ферропорошковые муфты (ФПМ) предназначены в основном для гибкого сцепления валов, хотя могут применяться и для жесткого сцепления. Конструктивное отличие ферропорошковых муфт с сухим или жидким наполнителем и электромагнитным управлением от рассмотренных ранее фрикционных муфт (ФМ) с таким же управлением заключается в том, что, во-первых, полумуфта на ведомом валу посажена жестко и, во-вторых, неизменный поэтому воздушный рабочий зазор заполнен магнитодиэлектриком. Последний представляет собой или смесь ферромагнитного порошка (стали, легированной хромом или никелем; карбонильного железа; пермаллоя и др.) с сухим диэлектриком (коллоидным графитом, тальком, тонкодисперсным стеклом и т.д.), называемым разделителем и служащим для предотвращения комкования и существенного уменьшения изнашивания муфты при высоких температурах, или взвесь ферромагнитного порошка (чаще всего карбонильного железа) в жидком диэлектрике (обычно кремнийорганическом или минеральном масле), предохраняющем порошок от окисления и комкования. Такие наполнители-магнитодиэлектрики обладают свойством тиксотропии, т.е. способностью становиться студенистыми, все более загустевая вплоть до затвердевания по мере усиления магнитного поля, а при снятии его возвращаться в исходное состояние. Ориентируясь по силовым линиям поля, ферромагнитные частицы образуют цепочки — связи, сцепляющие ведущую и ведомую поверхности. Ведущая поверхность, увлекая ведомую, приводит ее в движение. На рис. 16.3, а показана схема цилиндрической ФПМ с двумя концентрическими поверхностями 10 и 9. Кольцевое пространство между ними заполнено порошковой смесью 8. На внутренней — ведущей полумуфте расположена обмотка возбуждения 7, выведенная на контактные кольца 2, к которым прижимаются щетки 4. Крышки 5 и 14, изготовленные из немагнитного материала, позволяют направить большую часть магнитного потока через порошковый слой, уменьшив поток рассеяния, и снизить массу ведомой полумуфты. Линейность зависимости М(1) при малых и больших значениях тока нарушается (рис. 16.3, б) из-за изменения плотности сцепляющего слоя и насыщения магнитопровода. При отсутствии тока в обмотке с ведущего вала 3 на ведомый вал 12 передается небольшой вращающий момент М0, обусловленный силами трения в рабочем слое и уплотнениях муфты и остаточным магнитным потоком. Характеристика М(1) имеет магнитный и механический гистерезис (нисходящая ветвь показана штриховой линией). Отношение Δ М/Мmax колеблется в пределах 7... 15%, а М0/Мmax — в пределах 3... 10 %. На рис. 16.3, в дан эскиз магнитной системы ФПМ с неподвижной обмоткой. Такие муфты называют еще бесконтактными из-за отсутствия скользящих контактов кольцо—щетка. ФПМ обладают важным преимуществом по сравнению ФМ, так как в них осуществляется гибкое сцепление валов: образовавшиеся при данном токе магнитные связки выдерживают определенный предельный момент сопротивления Мс; при М < Мс эти связки разрушаются, муфта начинает проскальзывать, затем связки опять восстанавливаются и рвутся и т.д. Из-за такого импульсного воздействия частоты вращения и ведущего n 1 и ведомого п2 валов неравны, и последний вращается со скольжением
отличным от нуля. Таким образом, при гибком сцеплении валов n2 < n1. Проскальзывание ограничивает передаваемый момент М вплоть до остановки ведомого вала (s = l) при значительном превышении M c над М.
Рис. 16.3, г иллюстрирует одно из важнейших свойств ФПМ — независимость момента М на ведомом валу (передаваемого момента) от его частоты вращения при неизменном токе возбуждения (управления) обмотки. На рис. 16.3, д показана зависимость п2(М) для одной из ФПМ при I = 100 мА = const и n 1 = 500 об/мин = const. При М = Мск скольжение начинается, а при М = М т оно становится равным единице. Для этой же муфты на рис. 16.3, е приведена зависимость п2(I) при постоянном нагрузочном моменте Мн = 393 • 103 Нм = const и п1 = 500 об/мин = const. Кривую п2(I) можно построить по зависимостям М(I) и п2(М). Из рисунка видно, что при достаточно большом токе валы сцеплены жестко (п2 = п1, s = 0). Уменьшение тока до значения I ск вызывает проскальзывание муфты, вследствие чего п2 становится меньше п1. Чем меньше I, тем больше s. Когда I достигает значения I 0, ведомый вал останавливается (п2 = 0, s = 1). Таким образом, ФПМ позволяет регулировать частоту вращения. Выделяемая при этом теплота рассеивается либо посредством специальной системы охлаждения, либо за счет увеличения размеров муфты и связанного с этим недоиспользования ее по М. Кроме того, на почти вертикальном участке характеристики п2(I) поддерживать требуемую частоту вращения можно только с помощью достаточно сложной системы автоматического регулирования. Следовательно, возможности ФПМ по регулированию частоты вращения в широком диапазоне ограничены. На рис. 16.3, ж представлена зависимость Р/Ртах =f [ Iw/(Iw)max ]передаваемой мощности от МДС обмотки муфты. Так как наполнитель практически безынерционен, каждому мгновенному значению тока соответствуют определенные поток Ф и передаваемый момент М. Поскольку наполнитель увеличивает магнитную проницаемость рабочего зазора в 4...8 раз, мощность управления снижается примерно вдвое по сравнению с ФМ. К преимуществу ФПМ относится также их быстродействие (в 10... 15 раз больше, чем у ФМ), обусловленное неподвижностью обеих полумуфт в осевом направлении и практической безынерционностью наполнителя. Основной недостаток ФПМ — большие размеры и маееа'по сравнению с ФМ. Часто ФПМ применяют в качестве сцепных, предохранительных, динамометрических и тормозных, а благодаря линейной зависимости М(I) — ив качестве усилителей мощности для сервоприводов и следящих систем.
Муфты скольжения
Муфты скольжения (МС) предназначены в основном для гибкого сцепления валов и регулирования частоты вращения ведомого вала при нерегулируемом приводном двигателе. Их называют также асинхронными индукционными муфтами со связью через поле с электромагнитным управлением. Из всего конструктивного и функционального многообразия МС рассмотрим широко распространенные муфты индукторного типа с массивным якорем как наиболее простые в изготовлении и эксплуатации. Принцип действия таких МС поясним на примерах их конкретных исполнений, представленных на рис. 16.4. На рис. 16.4, а показана схема муфты индукторного типа со скользящими токоподводящими контактами, основными частями которой являются якорь 4 и индуктор 6. Между двумя рядами зубцов 3 муфты размещена кольцевая обмотка 5, питание к которой подводится с помощью колец 2. Такую конструкцию называют одно-именнополюсной, потому что зубцы каждого ряда имеют одинаковую полярность. Индуктор с помощью шлицев соединяется с ведущим валом 1, а якорь посажен на ведомом валу 7. При вращении индуктора вследствие механического перемещения электромагнитов возникает вращающееся магнитное поле. Взаимодействие наводимых при этом в якоре вихревых токов с вращающимся магнитным полем движет якорь в сторону вращения индуктора.
Выделим на внутренней поверхности якоря контуры, соответствующие очертаниям зубцов полюсов N и S. При вращении индуктора потокосцепления с выделенными контурами уменьшаются и в соответствии с законом электромагнитной индукции в якоре наводятся вихревые токи. Согласно принципу Ленца их направления должны быть такими, чтобы создаваемый ими магнитный поток был направлен согласно с магнитным потоком обмотки, а механические силы от взаимодействия последнего с вихревыми токами вызывали движение якоря за индуктором. Можно сказать, что на внутренней поверхности якоря против каждого полюса N индуктора возникает полюс S, а против полюса S индуктора — полюс N на якоре. Взаимное притяжение этих полюсов противоположных полярностей заставляет ведомый вал вращаться в сторону ведущего. На рис. 16.4, б представлена схема магнитной системы бесконтактной МС индукторного типа. В неподвижной части 12 магнитопровода этой муфты размещена кольцевая обмотка 13. Якорь 14 состоит из двух ферромагнитных половин цилиндрической формы, которые соединяются немагнитным кольцом 10, препятствующим замыканию магнитного потока 11 по якорю. Проходя по индуктору 8, этот поток намагничивает зубцы 9. Если на внутренней поверхности якоря при вращении индуктора магнитная индукция по окружности изменяется, наводя вихревые токи в якоре, то на внешней его поверхности магнитное поле близко к однородному, благодаря чему якорь 14 практически не взаимодействует с неподвижной частью 12. Бесконтактное исполнение увеличивает эксплуатационную надежность МС, однако при этом неизбежны повышенный расход меди в обмотке и увеличенные размеры магнитной системы. Это объясняется необходимостью создания большей МДС для преодоления дополнительного, нерабочего зазора между неподвижной частью магнитопровода и внешней поверхностью якоря. Для МС большой мощности, выполняемой с якорем в виде беличьей клетки, на рис. 16.4, в приведены механические характеристики зависимости момента от скольжения M(s) при неизменных токе возбуждения (I В = const) и частоте вращения приводного двигателя (n 1 = const). Каждому значению тока возбуждения соответствует своя механическая характеристика. С ростом I в уменьшается s вследствие большей связи якоря с индуктором через более сильное магнитное поле. Важнейшие достоинства МС — простота конструкции и управления, низкая стоимость, отсутствие изнашивающихся деталей, что обусловливает повышенный эксплуатационный ресурс. Кроме отмеченных ранее гибкого сцепления и плавного регулирования частоты вращения в многообразных конструктивных исполнениях МС обеспечиваются ограничение вращающего момента, регулирование тормозного усилия по любому закону, предохранение электропривода от поломок, пуск приводного двигателя вхолостую и с моментом сопротивления, превышающим пусковой момент. Основными недостатками МС являются значительные размеры, масса и потери энергии при длительной работе с большими скольжениями (мощность потерь пропорциональна s).
Глава 17
|
||||
|
|
Последнее изменение этой страницы: 2016-06-26; просмотров: 649; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.137.200.7 (0.017 с.) |