Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Магнитные усилители с самонасыщениемСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Лучшими динамическими характеристиками, т. е. меньшей инерционностью при данном kР, обладают магнитные усилители с самонасыщением. Простейшая схема магнитного усилителя с самонасыщением, на базе которой строятся более сложные схемы, дана на рис. 10.2. Идеализированная петля гистерезиса ферромагнитного сердечника магнитного усилителя представлена на рис. 10.3. Наличие выпрямителя В (см. рис. 10.2) в цепи рабочей обмотки (обмотка wр усилителя, последовательно с которой включена нагрузка RH) приводит к тому, что напряжение питания U приложено к этой обмотке и нагрузке лишь в течение проводящего для выпрямителя полупериода, называемого рабочим.
В соответствии с законом электромагнитной индукции изменение индукции в рабочем сердечнике усилителя в этот полупериод происходит только под действием напряжения питания U:
где S — поперечное сечение сердечника. В следующий полупериод изменение индукции в сердечнике происходит только под действием управляющего напряжения Uy, приложенного к обмотке управления wy. Этот полупериод называется управляющим. Для того чтобы воспрепятствовать трансформации напряжения из рабочей цепи в цепь управления, в последнюю включают либо дроссель Др, либо вентиль. Изменение индукции в рабочем и управляющем полупериодах происходит во взаимообратных направлениях. Обычно напряжение питания магнитных усилителей U выбирают таким, чтобы за время T /2, равное полупериоду питающего напряжения, оно было бы способно изменить индукцию в сердечнике на величину Δ В = 2BS, от точки -Bs до Bs, где Bs — индукция насыщения материала сердечника. Это изменение пропорционально входному сигналу. Если к началу рабочего полупериода исходная рабочая точка, характеризующая магнитное состояние сердечника, окажется не в точке -Bs, а выше на петле гистерезиса, то в рабочем полупериоде сердечник по закону электромагнитной индукции насытится не в конце периода, а несколько раньше. После этого напряжение питания окажется полностью приложенным к сопротивлению нагрузки, а ток в нагрузке скачком возрастет до I = U maxsin wt/R. Чем больше управляющее напряжение, тем ниже по петле гистерезиса опустится рабочая точка в управляющий полупериод. В результате в рабочий полупериод сердечник насытится позднее, и к нагрузке будет приложено меньшее напряжение. При максимальном управляющем напряжении по нагрузке в течение всего рабочего полупериода протекает только намагничивающий ток.
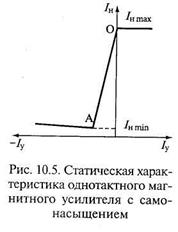
Если управляющее напряжение равно нулю, то в управляющий полупериод индукция не изменяется и исходной точкой тока будет точка Bs. Следовательно, в течение всего рабочего полупериода ток в нагрузке будет следовать за изменением напряжения. Диаграммы изменения индукции В в сердечнике, тока нагрузки I н, тока в обмотке управления I у во времени t даны на рис. 10.4. Зависимость тока I н нагрузки от тока I у в обмотке управления для магнитных усилителей с самонасыщением приведена на рис. 10.5.
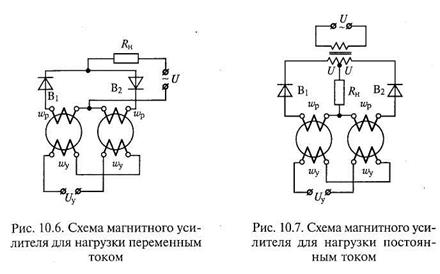
Характеристики подобного типа называются статическими характеристиками, а участок АО — рабочим участком. Магнитный усилитель, обладающий статической характеристикой, показанной на рис. 10.5, называют однотактным (нереверсивным). Основная особенность такого усилителя в том, что при изменении полярности управляющего сигнала ток в нагрузке, изменяясь по значению, остается все время однополярным. Схема, приведенная на рис. 10.2, является основой — типовым элементом при создании большинства современных магнитных усилителей. Рабочие полупериоды двух сердечников в схемах на рис. 10.6, 10.7 сдвинуты друг относительно друга на половину периода питающего напряжения. Обмотки управления двух сердечников соединены между собой так, чтобы в цепи управления не наводилось питающее напряжение. Если в однотактном магнитном усилителе (см. рис. 10.2) ток на выходе появляется лишь в течение одного из полупериодов питающего напряжения, то в усилителях, представленных на рис. 10.6 и 10.7, он появляется в течение каждого полупериода питающего напряжения.
В то время как один из сердечников находится в рабочем полупериоде и ток от источника может протекать через его рабочую обмотку wp и нагрузку, один из диодов блокирует рабочую обмотку другого сердечника, для которого наступает управляющий полупериод, т.е. его индукция изменяется под действием входного сигнала. В следующем полупериоде сердечники меняются ролями. В схеме на рис. 10.6 через нагрузку протекает переменный ток той же частоты, что и питающее напряжение, а в схеме на рис. 10.7 — выпрямленный двухполупериодный ток.
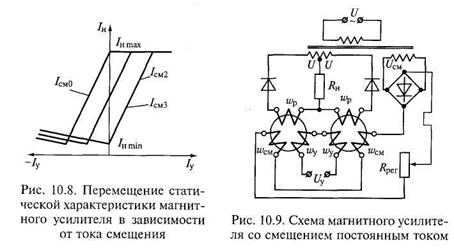
В магнитных усилителях с самонасыщением при отсутствии управляющего сигнала среднее значение тока нагрузки равно максимальному I нmах. Однако иногда бывает необходимо при отсутствии сигнала на входе усилителя получить минимальный ток в нагрузке. Поэтому в магнитных усилителях часто предусматривается так называемое смещение или начальное подмагничивание, что равноценно включению дополнительного управляющего напряжения. Под действием напряжения смещения изменение индукции в управляющем полупериоде происходит даже при отсутствии сигнала управления. Чем больше напряжение смещения, тем ниже по петле гистерезиса переместится рабочая точка.
В том случае, когда на вход усилителя подается также сигнал управления, перемещение рабочей точки в управляющий полупериод определяется суммой напряженностей, создаваемых сигналами смещения и управления (если эти сигналы вызывают изменение намагниченности сердечника в одном направлении), или их разностью (если действие сигналов противоположно). Введение начального подмагничивания позволяет как бы перемещать статическую характеристику усилителя вдоль оси абсцисс в зависимости от значения тока смещения (рис. 10.8). Очевидно, что при изменении тока смещения I см ток на выходе усилителя при отсутствии управляющего сигнала I у может принимать любые значения от I Hmax до I Hmin. Принципиально смещение в магнитных усилителях может осуществляться тремя способами: постоянным или выпрямленным током, переменным током, шунтированием выпрямителей в рабочей цепи сопротивлением. Наиболее широко применяется смещение постоянным током (рис. 10.9). Обмотки смещения обычно выполняются так же, как и обмотки управления. Последовательно с обмотками смещения для регулирования тока в них включают дополнительное сопротивление.
|
||||||
|
|
Последнее изменение этой страницы: 2016-06-26; просмотров: 698; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.147.13.83 (0.011 с.) |