Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Нереверсивный магнитный пускательСодержание книги Поиск на нашем сайте Основные сведения Магнитный пускатель – это комплектный аппарат, предназначенный для дистанци- онного управления электродвигателями и их защиты. Нереверсивный магнитный пускатель Конструктивно нереверсивный магнитный пускатель представляет собой металли- ческую коробку, внутри которой располагаются следующие аппараты и устройства: 1. контактор; 2. два тепловых реле; 3. кнопочный пост управления с двумя кнопками «Пуск» и «Стоп». Схема пускателя (рис.129) предусматривает выполнение таких действий: 1. пуск и остановку электродвигателя; 2. защиту электродвигателя.
Рис. 129. Принципиальная электрическая схема нереверсивного магнитного пускателя Элементы схемы На рис. 129 приняты такие обозначения: в силовой части: 1. Л1, Л2, Л3 – линейные провода питающей сети; 2. КМ1…КМ3 – главные контакты линейного контактора КМ; 3. КК1, КК2 – нагревательные элементы тепловых реле; 4. М – обмотка статора асинхронного двигателя; в схеме управления: 1. FU – предохранители, для защиты цепи катушки КМ от токов к.з.; 2. КК1, КК2 – размыкающие контакты тепловых реле; 3. КМ – катушка линейного контактора; 4. SB1 – кнопка «Пуск»; 5. SB2 – кнопка «Стоп»
5. Прочитать и объяснить работу принципиальной электрической схемы реверсивного магнитного пускателя;
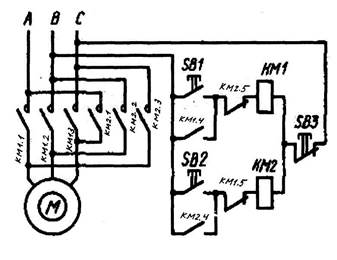
Основные сведения Магнитный пускатель – это комплектный аппарат, предназначенный для дистанци- онного управления электродвигателями и их защиты. Реверсивный магнитный пускатель Схема пускателя (рис.130) предусматривает выполнение таких действий: 1. пуск и остановку электродвигателя; 2. реверс; 2. защиту электродвигателя. Поэтому он имеет два реверсивных контактора: КМ1 «Вперёд», КМ2 «Назад» и три кнопки: SB1 «Вперёд», SB2 «Назад» и SB3 «Стоп».
Рис. 130. Принципиальная электрическая схема реверсивного магнитного пускателя
6. Прочитать и объяснить работу контроллерной схемы управления 3-скоростным якорно-швартовным электроприводом;
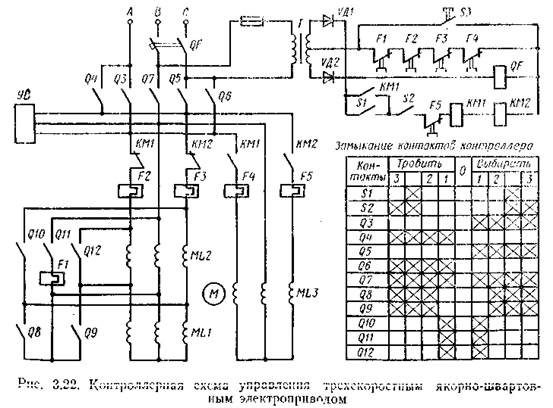
Схема предназначена для управления электроприводом якорно-швартовного устройства с 3-скоростным асинхронным двигателем. Основные сведения. Якорно-швартовные устройства предназначены для перемещения якоря и швартовных канатов. Число скоростей ЯШУ – 3 или 6. Для получения 3-х скоростей применяют асинхронный двигатель с короткозамкнутым ротором, 6-ти скоростей – асинхронный двигатель с фазным ротором. В данной схеме применяется асинхронный двигатель с короткозамкнутым ротором и тремя обмотками на статоре. Способ регулирования скорости – изменением числа пар полюсов. Мощность электродвигателя – 20...25 кВт. При подъёме (спуске) якоря используются только 1-я и 2-я скорости, при швартовных операциях – все 3. Контроллерная схема управления 3-скоростным якорно-швартовным электроприводом изображена на рис. 12.6.
Рис. 12.6. Контроллерная схема управления 3-скоростным якорно-швартовным электроприводом
Основные элементы схемы К основным элементам схемы относятся (рис. 12.6): 1. QF – автоматический выключатель электродвигателя; 2. YB – тормозной электромагнит; 3. F1…F5 – нагревательные элементы тепловых реле; 4. ML1, ML2, ML3 – обмотки статора 1-й, 2-й и 3-й скоростей; 5. Т – понижающий трансформатор для питания цепей управления; 6. VD1, VD2 – диоды схемы выпрямления; 7. S3 – аварийная кнопка блокировки тепловой защиты обмоток 1-й и 2-й скоростей; 8. QF – катушка минимального расцепителя автоматического выключателя QF; 9. КМ1, КМ2 - контакторы 3-й скорости. Особенность силовой части схемы состоит в том, что обмотки 1-й и 2-й скорости соединены последовательно, но при работе включаются поочерёдно. Такое соединение обеспечивает без обрывное переключение этих обмоток и защиту контактов Q10, Q11 и Q12 от обгорания. Таблица переключения контактов контроллера – в нижнем правом углу рис. 1. Как видно из таблицы, контроллер имеет 3 фиксированных положения в каждую сторону («травить» и «выбирать»). В промежуточном состоянии между положениями 2 и 3 рукоятка контроллера не фиксируется. Контроллер имеет 10 главных контактов - Q3…Q12 и 2 вспомогательных - S1 и S2.
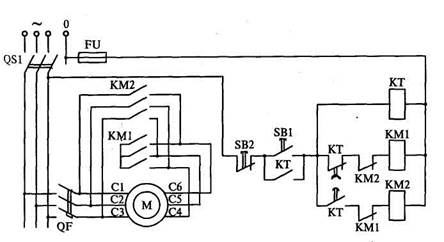
7. Прочитать и объяснить работу схемы пуска асинхронного двигателя переключением со звезды на треугольник; Основные сведения Пуск двигателя переключением со звезды на треугольник уменьшает пусковой ток в 3 раза. Поэтому этот способ пуска применяют для крупных асинхронных двигателей, прямое включение которых вызывают большие провалы напряжения судовой сети. Недостатком способа является уменьшение пускового момента в 3 раза, поэтому его применяют в электроприводах, допускающих при пуске уменьшение рабочих парамет- ров (у компрессора – давления, у насоса – подачи и т. п.)
Схема пуска Схема пуска асинхронного двигателя переключением со звезды на треугольник приведена на рис. 120.
Рис. 120. Схема пуска асинхронного двигателя переключением со звезды на треугольник Основные элементы схемы: 1. QS – рубильник; 2. QF - автоматический выключатель; 3. М - асинхронный электродвигатель; 4. FU – предохранитель цепей управления; 5. SB1 – кнопка «Пуск»; 6. SВ2 - кнопка «Стоп»; 6. KТ - реле времени электромеханическое;
7. КМ1 – контактор нулевой точки «звезды»; 8. КМ2 – контактор «треугольника». Выдержка времени электромеханического реле КТ начинается с момента подачи питания на катушку реле.
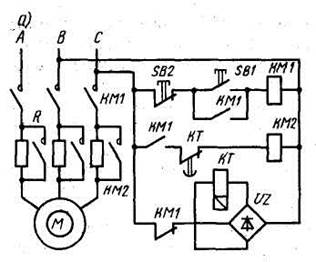
8. Прочитать и объяснить работу схемы автоматического пуска асинхронного электродвигателя в функции времени через пусковые резисторы в цепи обмотки статора; Основные сведения Пуск асинхронного двигателя через пусковые резисторы в цепи обмотки статора предназначен для уменьшения пусковых токов. При прямом пуске (без резисторов) пу- сковой ток превышает номинальный в 4…7 раз, что вызывает большие провалы напряже- ния судовой сети, а при частых пусках - перегревает обмотки статора и ротора. Недостатком способа является уменьшение пускового момента вследствие умень- шения напряжения на обмотке статора, поэтому его применяют в электроприводах, допу- скающих при пуске уменьшение рабочих параметров (у компрессора – давления, у насоса – подачи и т. п.)
Схема пуска Схема автоматического пуска асинхронного электродвигателя в функции времени через пусковые резисторы приведена на рис. 121.
Рис. 121. Схема автоматического пуска асинхронного электродвигателя в функции времени через пусковые резисторы в цепи обмотки статора На рис. 121 приняты такие обозначения: 1. А, В, С – линейные провода; 2. КМ1.1…КМ1.3 – главные контакты линейного контактора КМ1; 3. R 4. SB1, SB2 – кнопки соответственно «Пуск» и «Стоп»; 5. КМ1 – линейный контактор; 6. КМ2 – контактор ускорения; 7. КТ – электромагнитное реле времени (с демпфером); 8. UZ – выпрямительный мостик (мостик Греца).
9. Прочитать и объяснить работу схемы автоматического пуска асинхронного электродвигателя в функции времени через пусковые резисторы в цепи обмотки ротора; Пуск асинхронного двигателя через пусковые резисторы в цепи обмотки ротора предназначен для уменьшения пусковых токов. При прямом пуске (без резисторов) пу- сковой ток превышает номинальный в 4…7 раз, что вызывает большие провалы напряже- ния судовой сети, а при частых пусках - перегревает обмотки статора и ротора. Поскольку при пуске в ротор вводятся резисторы с большим активным сопротивлетием, ток ротора получается практически активным, что увеличивает пусковой момент двигателя до необходимого значения. На судах асинхронные двигатели с фазным ротором нашли ограниченное примене ние, в основном, в электроприводах грузовых кранов и якорно-швартовных устройст (бра шпилей). Схема автоматического пуска асинхронного электродвигателя в функции времени через пусковые резисторы приведена на рис. 122.
Рис. 122. Схема автоматического пуска асинхронного электродвигателя в функции времени через пусковые резисторы в цепи обмотки ротора На рис. 122 приняты такие обозначения: 1. QF – автоматический выулючатель; 2. КМ – линейный контактор; 3. КМ1, КМ» и КМ3 – контакторы ускорения; 4. SB1 – кнопка «Пуск»; 5. SB2 – кнопка «Стоп»; 6. R Особенность схемы состоит в том, что для обеспечения выдержки времени к контакторам пристроены маятниковые реле времени. 10. Прочитать и объяснить работу схемы пуска асинхронного двигателя с фазным ротором;
Асинхронные двигатели с фазным ротором пускают в ход с помощью резисторов, включаемых в цепь ротора, что позволяет уменьшить пусковой ток и увеличить пусковой момент двигателя (рис. 9.17)..
Рис. 9.17. Схема пуска асинхронного двигателя с фазным ротором
11. Прочитать и объяснить работу схемы электропривода брашпиля по системе Г – Д; Системой генератор-двигатель (Г-Д) называют систему, в которой исполнитель- ный двигатель, приводящий в движение механизм, питается от отдельного генератора, а не от судовой сети. Сам генератор приводится в движение дизелем (на электроходах) или асинхрон- ным электродвигателем ПД (в данной схеме). Система Г-Д имеет низкий коэффициент полезного действия – 30 - 40%, что объяс- няется трёхкратным преобразование энергии. В данной схеме такое преобразование проис ходит:
емая от генератора Г, преобразуется в механическую на их валах. Однако система Г-Д позволяет плавно и в широких пределах регулировать скорость исполнительного двигателя, чего нельзя достигнуть иными способами регулирования скорости. Поэтому она до сих пор широко применяется на судах. В этой системе обмотки якорей генератора Г и исполнительных двигателей 1ИД и 2ИД соединены последовательно (они обтекаются одинаковым током), что позволило создать простую и эффективную защиту от токов перегрузки при помощи последователь ной противокомпаундной обмотки (ПКО) генератора (см. ниже). Рис. 103. Схема управления 3-фазного асинхронного двигателя с одного (а) и двух (б) постов управления
Элементы схемы Силовая часть: 1. А, В, С – линейные провода; 2. КМ1…КМ3 – главные контакты линейного контактора КМ; 3. М – обмотка статора 3-фазного асинхронного двигателя Схема управления: 1. SB1 – контакты кнопки «Пуск»; 2. SB2 – контакты кнопки «Стоп»; 3. КМ4 – вспомогательный контакт контактора КМ.
18. Прочитать и объяснить работу структурной схемы авторулевого;
Отклонение судна от заданного курса воспринимается гирокомпасом ГК (рис. 10.32), который через датчик повернет ротор сельсина-приемника курса СП. Последний через необратимую передачу НП поворачивает вал механического дифференциала МД. На второй вал механического дифференциала от штурвала подает- ся заданное значение курса α нения отзаданного курса α.
Рис. 10.32. Структурная схема авторулевого
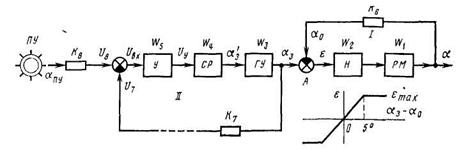
19. Прочитать и объяснить работу обобщенной разомкнутой системы ручного управления РЭГ-приводом; Изменение направления подачи масла от насоса на рулевую машину, необходимое для перекладки руля, производится специальным управляющим устройством – сервомеханизмом. В РЭГ-приводах с насосами постоянной подачи оконечный каскад сервомеханизма представляет собой дросселирующий золотник, посредством которого насос связывается с рулевой машиной. Управление золотником осуществляется магнитным (соленоид) или машинным серводвигателем, который воздействует на золотник непосредственно или через промежуточный гидроусилитель. В приводах с насосами переменной подачи сервомеханизм включает в себя электрический двигатель - серводвигатель, связанный через кинематическую передачу с манипулятором насоса. Весьма часто в состав управляющей кинематики включают гидроусилитель, что существенно снижает мощность электрического серводвигателя.
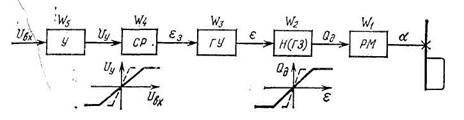
Напомним, что при простом управления в качестве органов управления используют кнопки «Лево руля», «право руля» или рычаг управления («джостик»). Руль перекладывается все то время, пока нажата одна из кнопок или рычаг вы веден из нейтрального положения. Перекладка прекращается, если отпустить кнопку или вернуть рукоятку поста в исходное - нулевое положение. Об угловом состоянии руля в каждый момент времени судят по рулевому указателю - аксиометру. Обобщенная разомкнутая схема ручного управления рулем по времени показана на рис. 10.17. Здесь представлены: РМ - рулевая машина; Н - насос переменной подачи (ГЗ - гидрозолотник в системе управления с насосом нерегулируемой подачи); ГУ – гидроусили тель; СР - серводвигатель; У - электрический усилитель.
Рис. 10.17. Обобщенная разомкнутая система ручного управления РЭГ-приводом
20. Прочитать и объяснить работу структурной схемы следящего управления РЭГ-приводом с механической обратной связью; Изменение направления подачи масла от насоса на рулевую машину, необходимое для перекладки руля, производится специальным управляющим устройством – сервомеханизмом. В РЭГ-приводах с насосами постоянной подачи оконечный каскад сервомеханизма представляет собой дросселирующий золотник, посредством которого насос связывается с рулевой машиной. Управление золотником осуществляется магнитным (соленоид) или машинным серводвигателем, который воздействует на золотник непосредственно или через промежуточный гидроусилитель. В приводах с насосами переменной подачи сервомеханизм включает в себя электрический двигатель - серводвигатель, связанный через кинематическую передачу с манипулятором насоса. Весьма часто в состав управляющей кинематики включают гидроусилитель, что существенно снижает мощность электрического серводвигателя. Напомним, что при следящем управления в качестве органа управления используют штурвал поста управления в рулевой рубке. При повороте штурвала на определенный угол в необходимую сторону (влево или вправо относительно нулевого положения) перо руля повернется на такой же (или пропорциональный) угол и автоматически остановится. Иначе говоря, перо руля повторяет поворот штурвала, как бы следит за движением штурвала, отсюда название – следящее управление. При этом угол поворота пера руля тем больше, чем больше угловое расстояние (угловой путь), описанное штурвалом, отсюда второе название – управление по пути. Из сказанного следует, что у каждому положению штурвала после отработки соответствует определенное положение руля. Таким образом, следящее управление является полуавтоматическим – на первом этапе управления участвует человек (поворачивает вручную штурвал), на втором этапе используются элементы автоматики (сельсин-датчик руля в румпельном отделении), обеспечивающие автоматическую (без участия человека) остановку руля. Аксиометр является средством дополнительного контроля положения руля. Система следящего управления может быть создана путем замыкания входа и выхода разомкнутой системы (рис. 10.16) через соответствующие преобразующие устройства. Внутри следящего контура оказываются последовательно включенными два интегрирующих звена СР и РМ. Такие системы являются структурно неустойчивыми. Для придания устойчивости одно из интегрирующих звеньев должно быть охвачено жесткой обратной связью. Широко распространены схемы (рис. 10.18), где обратной связью охвачены два звена: рулевая машина РМ и насос регулируемой подачи.
Рис. 10.18. Структурная схема следящего управления РЭГ-приводом с механической обратной связью
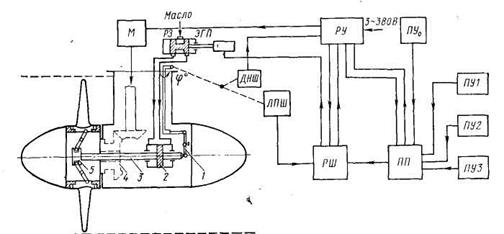
21. Прочитать и объяснить работу функциональной схемы электропривода подруливающего устройства с ВРШ;
К основным деталям устройства относятся (рис. 10.34):
Рис. 10.34. Функциональная схема электропривода подруливающего устрой- ства с ВРШ
ЛПШ – линейный преобразователь шага, для преобразования угла поворота лопастей винта в пропорциональное напряжение; ДНШ – датчик нулевого шага, представляет собой конечный выключатель, контакты которого замкнуты только при нулевом шаге лопастей винта; М – приводной электродвигатель винта, для вращения винта; ПП – переключатель постов управления; ПУ1- пост управления на крыле левого борта; ПУ2 – то же, в рулевой рубке; ПУ3- то же, на крыле левого борта; ПУ0 – то же, в ЦПУ; РУ – распределительное устройство (щит электропитания); РШ – регулятор шага винта, для выработки напряжения,; ЭГП – электрогидравлический преобразователь; РЗ – распределительный золотник; 1 – рычаг, для передачи информации о положении лопастей в ЛПШ и ДНШ; 2 – сервомотор, для создания усилия, поворачивающего лопасти винта; 3 – шток сервомотора, для передачи усилия от поршня сервомотора 2 к кондуктору 5; 4 – коническая зубчатая передача, для передачи вращающего момента электродвигателя на ступицу винта (т.е. для вращения винта); 5 – кондуктор, устройство для непосредственного разворота лопастей винта.
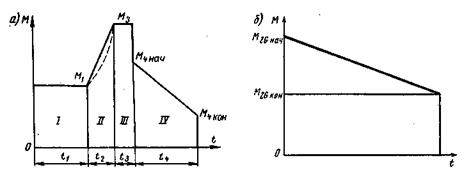
22. Прочитать и объяснить нагрузочные диаграммы электропривода брашпиля при подъеме одного (а) и двух (б) якорей; Нагрузочной диаграммой электропривода называют зависимость мощности, тока или момента электродвигателя от времени. Нагрузочная диаграмма электропривода брашпиля – это зависимость момента на валу электродвигателя от времени (рис. 12.4). Рассмотрим нагрузочные диаграммы электропривода брашпиля при подъеме 1-го якоря с полной расчётной глубины стоянки (рис. 12.5,а) и 2-х якорей с половинной расчётной глубины (рис. 12.5, б). Режим подъёма одного якоря. При стоянке судна на якоре один конец якорной цепи с якорем лежит на грунте, а второй проходит через клюз и якорную звёздочку в цепной ящик. Провисающая в воде часть цепи “а” находится под действием внешних сил, действующих на судно: силы ветра F Увеличение натяжения цепи вызывает подъём части цепи с грунта, при этом увеличивается длина её провисающей части. Процесс снятия судна с якоря делится на 4 стадии (рис. 12.4).
Рис.12.4. Процесс снятия судна с якоря В стадии 1 брашпиль выбирает цепь, втягивая её звенья в клюз. При этом судно под действием усилия в цепи, созданного работой электродвигателя брашпиля, движется с небольшой скоростью к месту залегания якоря. Количество звеньев, втягиваемых в клюз, равно количеству звеньев, поднятых с грунта, поэтому форма провисающей части цепи «б» не изменяется. Значит, сила натяжения цепи у входа в клюз и момент М Стадия 1 заканчивается, когда с грунта будет поднято последнее свободно лежащее звено цепи. На этой стадии скорость выбирания якоря увеличивается, как правило, от 9 до 12 м / мин.
Рис. 12.5. Нагрузочные диаграммы электропривода брашпиля при подъеме одного (а) и двух (б) якорей 23. Прочитать и объяснить нагрузочную диаграмму электропривода при работе одной лебедки; Электроприводы ГПМ работают в повторно-кратковременном режиме, который в соответствии с международной классификацией обозначается S3. Этот режим характеризуется частыми пусками и остановками электродвигателя ГПМ. В общем виде цикл работы грузовой лебедки состоит из следующих 8 операций: 1. подъем груза; 2. перенос груза в горизонтальной плоскости; 3. опускание груза; 4. расстропка груза; 5. подъем холостого гака; 6. обратное перемещение гака в горизонтальной плоскости; 7. опускание холостого гака; 8. застропка груза. Грузовые операции могут осуществляться одной лебедкой, двумя лебедками или грузовым краном. Для обоснованного выбора режима эксплуатации ЭП, а также для выбора ЭД по мощности необходимо прежде всего знать, как изменяется нагрузка на валу ЭД во вре- мени. С этой целью используют нагрузочные диаграммы, представляющие собой зависимость момента на валу двигателя от времени, т.е. М (t). Элементы схемы На схеме компрессора показаны: 1. электромагнитный клапан ЭМ1 (YV1), соединяющий нагнетательную по- лость 1(рис. 11.9, а) с атмосферой, при этом воздух стравливается непосредственно в МО. Предназначен для разгрузки компрессора. В ходовом режиме включается редко, только при пуске компрессора, в режиме манёвров включается часто; 2. электромагнитные клапана ЭМ2 (YV2) и ЭМ3 (YV3), соединяющие цилинд- ры низкого и высокого давления 2 и 3 (рис. 11.9, а) с атмосферой. Предназначены для продувки цилиндров. Если клапана включены, продувочные отверстия закрыты, и наобо- рот. В ходовом режиме клапана постоянно закрыты, продувка невозможна. Это являет- ся серьёзным недостатком схемы управления. В режиме манёвров, когда двигатель работает непрерывно, клапана периодически открываются. При этом очищаются цилиндры, а двигатель частично разгружается; 3. электромагнитный клапан ЭМ4 (YV4) для доступа охлаждающей воды к на- гретым частям компрессора; 4. переключатели SA1 и SA2 для выбора необходимого режима работы. Пере- ключатель SA1 расположен рядом с компрессором, переключатель SA2 находится в ЦПУ; 5. аварийный выключатель SA3 для остановки компрессора; находится рядом с компрессором; 6. реле давления воздуха SP1 для управления работой компрессора в ходовом режиме; его контакт замыкается при понижении давления воздуха до 26 at и размыкается при повышении давления до 30 at; 7. реле давления воздуха SP1' для управления работой компрессора в режиме манёвров; его контакт замыкается при повышении давления воздуха до 32 кгс at и размы- кается при понижении давления до 28 at; 8. аварийный датчик температуры охлаждающей воды SК; установлен на выхо де воды из компрессора, При повышении температуры до 60º С переключает свой кон- такт в нижнее положение, при этом отключается двигатель компрессора и включается сигнализация; 9. аварийный датчик давления охлаждающей воды SР2; при понижении давле- ния до 0,8 at переключает свой контакт в верхнее положение, при этом отключается двига тель компрессора и включается сигнализация; 10. аварийный датчик давления масла SР3, при понижении давления масла до 0,6 at переключает свой контакт в верхнее положение, при этом отключается двигатель компрессора и включается сигнализация; 11. промежуточное реле KV1 для управления продувкой цилиндров в режиме манёвров; при повышении давления воздуха до 32 at контакт реле давления SP1' замыкает ся и включает это реле; 12. реле времени КТ1 с выдержкой в 10 с для контроля времени разгрузки ком- прессора в режиме манёвров; при повышении давления воздуха до 32 at контакт реле дав- ления SP1' замыкается и включает это реле; 13. сигнальные реле КV6, KV5 и KV4, включаются при критических значениях соответственно температуры и давления охлаждающей воды, а также давления масла; 14. сигнальное реле KV2 «работа», включается после окончания пуска компресс- сора; 15. реле времени КТ2 с выдержкой времени 6 с, для управления продолжитель- ностью разгрузки компрессора в ходовом режиме; 16. реле времени КТ3, с выдержкой времени 8 с, для блокировки отключения компрессора во время пуска при кратковременном понижении давления воды и масла; 17. разгрузочное реле KV3 для непосредственного управления разгрузочным клапаном YV1; в ходовом режиме включается через контакты реле времени КТ2, в режиме манёвров – через контакты реле времени КТ1.
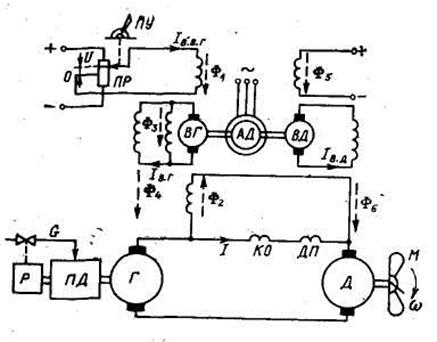
28. Прочитать и объяснить работу принципиальной схемы дизельной электрической установки (ДГЭУ) на постоянном токе; Пример принципиальной схемы дизельной электрической установки (ДГЭУ) на постоянном токе показан на рис. 14.2.
Рис. 14.2. Принципиальная схема дизельной электрической установки на постоянном токе
Подобные. схемы используются на буксирах, судах ледового плавания и ледоко- лах Основные элементы установки: 1. первичный двигатель ПД, частота вращения которого поддерживается постоянной регулятором Р, изменяющим расход топлива; 2. генератор постоянного тока Г с двумя обмотками возбуждения; 3. гребной двигатель Д; 4. возбудительный агрегат, состоящий из асинхронного приводного двигателя АД, возбудителя генератора ВГ и возбудителя двигателя ВД; 5.: пост управления ПУ, расположенный в ходовой рубке или ЦПУ.
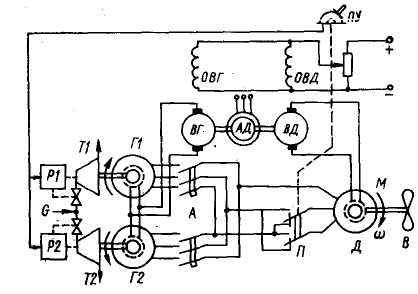
29. Прочитать и объяснить работу принципиальной схемы одновальной ТГЭУ на переменном токе; Принципиальная схема возможного варианта одновальной турбоэлектрической установки на переменном токе, показанная в качестве примера на рис. 14.5, имеет две турбины Т1 и Т2 с регуляторами Р1 и Р2, дистанционно связанными с постом управления ПУ, с которого осуществляет ся плавное изменение частоты вращения гребного синхронного двигателя Д и винта В. Возбудительный агрегат ВГ- АД -ВД с зависимым параллельным включением обмоток возбудителей генераторов ОВГ и двигателя ОВД обеспечивает регулируемое возбуждение этих машин. Автоматы А и переключатель П предназначены со ответственно для включения генераторов Г1 и Г2 и переключения следования фаз(реверса) гребного двигателя Д.
Рис. 14.5. Принципиальная одновальная ТГЭУ на переменном токе
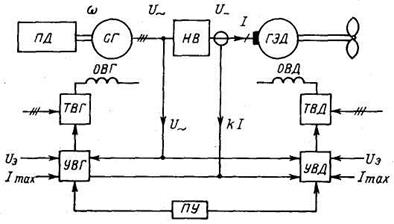
30. Прочитать и объяснить работу структурной схемы ГЭУ двойного рода тока; Структурная схема гребной электроустановки двойного рода тока с неуправляе- мым выпрямителем в виде одного из возможных вариантов представлена на рис. 14.6.
Рис. 14.6. Структурная схема ГЭУ двойного рода тока
Синхронный генератор СГ, питающий гребной электродвигатель постоянного тока ГЭД независимого возбуждения, вращается первичным двигателем ПД с постоянной частотой ω. Гребной электродвигатель ГЭД постоянного тока подключается к синхронному ге нератору через неуправляемый выпрямитель НВ.
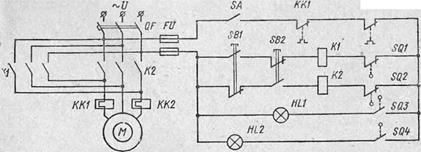
31. Прочитать и объяснить работу с хемы электропривода лебедки поворота грунтоотводного клапана;
В качестве примера на рис. 76 приведена схема электропривода лебедки клапана. Двигатель М реверсируется с помощью контакторов К1 и К2, управляемых кнопками SBI и SB2. Для ограничения угла, поворота клапана установлены конечные выключатели SQ1 и SQ2. Граничные положения клапана сигнализируются лампами ff LI и HL2. Схема электропривода лоткоподъемной лебедки аналогична схеме электропривода лебедки поворота клапана; в нее добавляется только тормозное устройство. КК2
Рис. 76. Схема электропривода лебедки поворота грунтоотводного клапана
32. Прочитать и объяснить способы поиска места неисправности в электрической схеме привода поворота крана;
Рассмотрим пример неисправности электрической схемы привода механизма поворота крана С-981А. Неисправность заключается в том, что механизм поворота не включается в направлении Влево. Все остальные механизмы, в том числе и механизм поворота в направлении Вправо, работают. Если при пробном включении рукоятки командоконтроллера в первое положение Влево не включается магнитный пускатель К2 (рис 1, а), неисправность следует искать в цепи управления, т. е. в цепи катушки этого пускателя (цепь: провод 27, контакт В1-3 пускателя К2 и перемычки между главными контактами пускателя К2 и пускателя К1
Рис. 1. Поиск места неисправности в электрической схеме привода поворота крана С-981А; а — принципиальная электрическая схема привода поворота крана; б — монтажная электрическая схема реверсивного магнитного пускателя; /, //, ///,, IV — последовательность включения вольтметра при проверке цепи Место обрыва можно определить, проверяя цепь с помощью вольтметра или контрольной лампы, которые включают, как показано на рисунке.
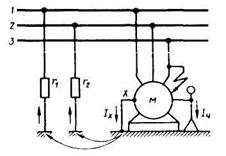
33. Прочитать и объяснить работу схемы защитного заземления корпуса приемника электроэнергии;
Применение защитного заземления, т. е. электрического соединения с корпусом судна корпусов электрических машин, металлических частей кожухов, корпусов пускорегулирующей аппаратуры и распределительных устройств, светильников, измерительных приборов и др., работающих при напряжении свыше 12 В.
Рис. 18. 6. Схема защитного заземления корпуса приемника электроэнергии
Человек, прикоснувшийся к заземленному корпусу электродвигателя М, оказавшеемуся под напряжением, окажется включенным параллельно замыкающей перемычке X.
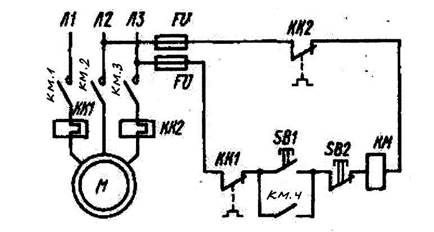
Основные сведения Магнитный пускатель – это комплектный аппарат, предназначенный для дистанци- онного управления электродвигателями и их защиты. Нереверсивный магнитный пускатель Конструктивно нереверсивный магнитный пускатель представляет собой металли- ческую коробку, внутри которой располагаются следующие аппараты и устройства: 1. контактор; 2. два тепловых реле; 3. кнопочный пост управления с двумя кнопками «Пуск» и «Стоп». Схема пускателя (рис.129) предусматривает выполнение таких действий: 1. пуск и остановку электродвигателя; 2. защиту электродвигателя.
Рис. 129. Принципиальная электрическая схема нереверсивного магнитного пускателя Элементы схемы На рис. 129 приняты такие обозначения: в силовой части: 1. Л1, Л2, Л3 – линейные провода питающей сети; 2. КМ1…КМ3 – главные контакты линейного контактора КМ; 3. КК1, КК2 – нагревательные элементы тепловых реле; 4. М – обмотка статора асинхронного двигателя; в схеме управления: 1. FU – предохранители, для защиты цепи катушки КМ от токов к.з.; 2. КК1, КК2 – размыкающие контакты тепловых реле; 3. КМ – катушка линейного контактора; 4. SB1 – кнопка «Пуск»; 5. SB2 – кнопка «Стоп»
5. Прочитать и объяснить работу принципиальной электрической схемы реверсивного магнитного пускателя;
Основные сведения Магнитный пускатель – это комплектный аппарат, предназначенный для дистанци- онного управления электродвигателями и их защиты.
|
||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 4943; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.015 с.) |

 - пусковые резисторы (3 шт., по одному в каждом линейном проводе);
- пусковые резисторы (3 шт., по одному в каждом линейном проводе);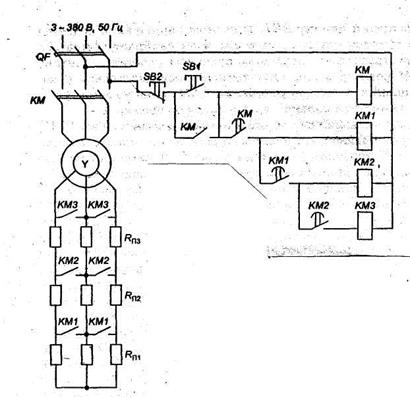
 , R
, R  и R
и R  - пусковые резисторы в цепи ротора.
- пусковые резисторы в цепи ротора.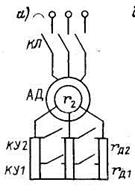
 . На выходном (третьем) валу МД получается разность между заданным и истинным значениями курса, которая характеризуется углом откло-
. На выходном (третьем) валу МД получается разность между заданным и истинным значениями курса, которая характеризуется углом откло-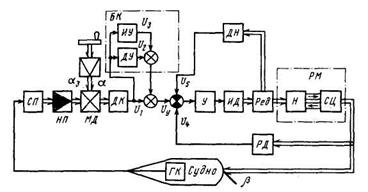
 и силы течения воды Fт. Чем больше эти силы, тем сильнее натянута якорная цепь.
и силы течения воды Fт. Чем больше эти силы, тем сильнее натянута якорная цепь.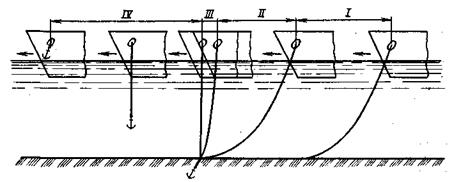
 на валу электродвигателя на этой стадии не изменяются (рис. 12.5, а).
на валу электродвигателя на этой стадии не изменяются (рис. 12.5, а).