Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Схемы защиты от токов короткого замыканияСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
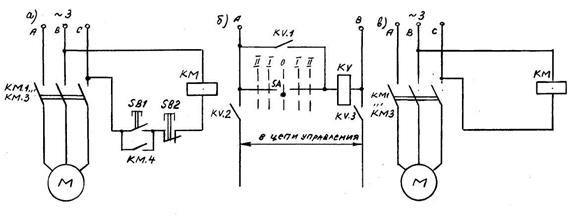
На судах в качестве защитных устройств от токов короткого замыкания применяют: 1. предохранители; 2. автоматические выключатели; 3. реле максимального тока.
Все эти устройства действуют мгновенно. Например, собственное время срабатывания автоматических выключателей в сред- нем 0,03 с, реле максимального тока - 0,015 с, предохранителей - сотые доли секунды, причем время сгорания плавкой вставки тем меньше, чем больше ток короткого замыкания.
Рис. 111. Схемы защитных устройств от токов короткого замыкания: а - с предохра нителями; б - с автоматическим выключателем; в - с реле максимального тока
15. Прочитать и объяснить работу схем защит по снижению напряжения: а, б – нулевая; в – минимальная;
Схемы защит по снижению напряжения
Минимальная защита Вначале, как более простую, рассмотрим минимальную защиту, которая применяет ся только в рулевых электропривода (рис. 109, в).
Рис. 109. Защиты по снижению напряжения: а, б – нулевая; в – минимальная.
Катушка контактора КМ питается от линейных проводов В и С. При номинальном напряжении сети контактор включен, через его главные контакты КМ1…КМ3 подается питание на обмотку статора двигателя М. При снижении напряжения до недопустимого (обычно до 60% номинального) якорь контактора отпадает, контакты КМ1…КМ3 размыкаются, двигатель отключается от сети. При восстановлении напряжения до номинального ток в катушке КМ становится номинальным, контактор включается, происходит повторный пуск двигателя. Таким образом, данная схема обеспечивает автоматическое повторное включе- ние электродвигателя после восстановления напряжения.
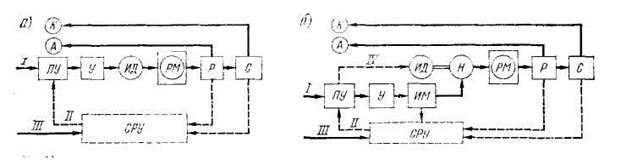
16. Прочитать и объяснить работу структурных схем управления судном: а – с использованием РЭМ-привода; б - с использованием РЭГ-привода; Угловое перемещение руля, необходимое для поворота судна, осуществляет- ся с помощью силового электропривода. Электроприводом производится перекладка руля, его остановка, реверсирование, регулирование скорости и т. д. В состав рулевого электропривода входит исполнительный электродвигатель ИД, передаточный механизм (рулевая машина) РМ, система управления рулем, система контроля (10.2).
Рис. 10.2. Структурные схемы управления судном: а – с использованием РЭМ-привода; б - с использованием РЭГ-привода; I – ручное управление; II – автоматическое управление; III – управляющая программа; IV – изготовка; С – судно; Р – руль; ПУ – пост управления рулем; У - усилитель; ИД – исполнительный двигатель; ИМ – исполнительный механизм (насоса в электрогидравлических рулевых машинах); Н – насос переменной или постоянной производительности (в электрогидравлических рулевых машинах); РМ – рулевая машина; СРУ – счетно-решающее устройство (навигационный комплекс); А – аксиометр (рулевой указатель); К – репитер гирокомпаса (сельсин-приемник гирокомпаса) На рис. 10.2 показана общая структурная схема управления судном, где выходными звеньями являются руль Р и судно С.
17. Прочитать и объяснить работу схем управления 3-фазного асинхронного двигателя с одного (а) и двух (б) постов управления;
Схема управления 3-фазного асинхронного двигателя с одного и двух постов управ ления приведена на рис. 103.
Рис. 103. Схема управления 3-фазного асинхронного двигателя с одного (а) и двух (б) постов управления
Схема управления 3-фазным асинхронным двигателем с одного поста управления Схема (рис. 103, а) предусматривает пуск и остановку двигателя при помощи кно Почного поста, состоящего из кнопок «Пуск» и «Стоп». Эта схема применяется для управления наиболее простых судовых электроприводов – насосов, вентиляторов, шлюпочных и траповых лебедок и т.п.
Элементы схемы Силовая часть: 1. А, В, С – линейные провода; 2. КМ1…КМ3 – главные контакты линейного контактора КМ; 3. М – обмотка статора 3-фазного асинхронного двигателя Схема управления: 1. SB1 – контакты кнопки «Пуск»; 2. SB2 – контакты кнопки «Стоп»; 3. КМ4 – вспомогательный контакт контактора КМ.
18. Прочитать и объяснить работу структурной схемы авторулевого;
Отклонение судна от заданного курса воспринимается гирокомпасом ГК (рис. 10.32), который через датчик повернет ротор сельсина-приемника курса СП. Последний через необратимую передачу НП поворачивает вал механического дифференциала МД. На второй вал механического дифференциала от штурвала подает- ся заданное значение курса α нения отзаданного курса α.
Рис. 10.32. Структурная схема авторулевого
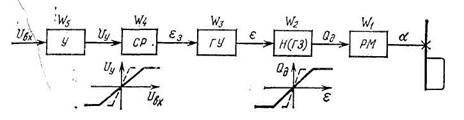
19. Прочитать и объяснить работу обобщенной разомкнутой системы ручного управления РЭГ-приводом; Изменение направления подачи масла от насоса на рулевую машину, необходимое для перекладки руля, производится специальным управляющим устройством – сервомеханизмом. В РЭГ-приводах с насосами постоянной подачи оконечный каскад сервомеханизма представляет собой дросселирующий золотник, посредством которого насос связывается с рулевой машиной. Управление золотником осуществляется магнитным (соленоид) или машинным серводвигателем, который воздействует на золотник непосредственно или через промежуточный гидроусилитель. В приводах с насосами переменной подачи сервомеханизм включает в себя электрический двигатель - серводвигатель, связанный через кинематическую передачу с манипулятором насоса. Весьма часто в состав управляющей кинематики включают гидроусилитель, что существенно снижает мощность электрического серводвигателя.
Напомним, что при простом управления в качестве органов управления используют кнопки «Лево руля», «право руля» или рычаг управления («джостик»). Руль перекладывается все то время, пока нажата одна из кнопок или рычаг вы веден из нейтрального положения. Перекладка прекращается, если отпустить кнопку или вернуть рукоятку поста в исходное - нулевое положение. Об угловом состоянии руля в каждый момент времени судят по рулевому указателю - аксиометру. Обобщенная разомкнутая схема ручного управления рулем по времени показана на рис. 10.17. Здесь представлены: РМ - рулевая машина; Н - насос переменной подачи (ГЗ - гидрозолотник в системе управления с насосом нерегулируемой подачи); ГУ – гидроусили тель; СР - серводвигатель; У - электрический усилитель.
Рис. 10.17. Обобщенная разомкнутая система ручного управления РЭГ-приводом
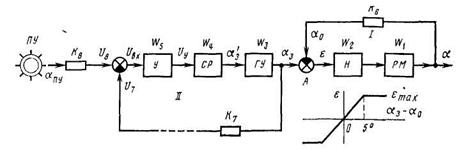
20. Прочитать и объяснить работу структурной схемы следящего управления РЭГ-приводом с механической обратной связью; Изменение направления подачи масла от насоса на рулевую машину, необходимое для перекладки руля, производится специальным управляющим устройством – сервомеханизмом. В РЭГ-приводах с насосами постоянной подачи оконечный каскад сервомеханизма представляет собой дросселирующий золотник, посредством которого насос связывается с рулевой машиной. Управление золотником осуществляется магнитным (соленоид) или машинным серводвигателем, который воздействует на золотник непосредственно или через промежуточный гидроусилитель. В приводах с насосами переменной подачи сервомеханизм включает в себя электрический двигатель - серводвигатель, связанный через кинематическую передачу с манипулятором насоса. Весьма часто в состав управляющей кинематики включают гидроусилитель, что существенно снижает мощность электрического серводвигателя. Напомним, что при следящем управления в качестве органа управления используют штурвал поста управления в рулевой рубке. При повороте штурвала на определенный угол в необходимую сторону (влево или вправо относительно нулевого положения) перо руля повернется на такой же (или пропорциональный) угол и автоматически остановится. Иначе говоря, перо руля повторяет поворот штурвала, как бы следит за движением штурвала, отсюда название – следящее управление. При этом угол поворота пера руля тем больше, чем больше угловое расстояние (угловой путь), описанное штурвалом, отсюда второе название – управление по пути. Из сказанного следует, что у каждому положению штурвала после отработки соответствует определенное положение руля. Таким образом, следящее управление является полуавтоматическим – на первом этапе управления участвует человек (поворачивает вручную штурвал), на втором этапе используются элементы автоматики (сельсин-датчик руля в румпельном отделении), обеспечивающие автоматическую (без участия человека) остановку руля. Аксиометр является средством дополнительного контроля положения руля. Система следящего управления может быть создана путем замыкания входа и выхода разомкнутой системы (рис. 10.16) через соответствующие преобразующие устройства. Внутри следящего контура оказываются последовательно включенными два интегрирующих звена СР и РМ. Такие системы являются структурно неустойчивыми. Для придания устойчивости одно из интегрирующих звеньев должно быть охвачено жесткой обратной связью. Широко распространены схемы (рис. 10.18), где обратной связью охвачены два звена: рулевая машина РМ и насос регулируемой подачи.
Рис. 10.18. Структурная схема следящего управления РЭГ-приводом с механической обратной связью
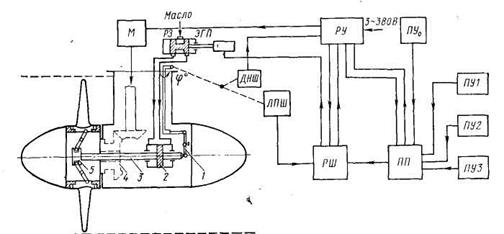
21. Прочитать и объяснить работу функциональной схемы электропривода подруливающего устройства с ВРШ;
К основным деталям устройства относятся (рис. 10.34):
Рис. 10.34. Функциональная схема электропривода подруливающего устрой- ства с ВРШ
ЛПШ – линейный преобразователь шага, для преобразования угла поворота лопастей винта в пропорциональное напряжение; ДНШ – датчик нулевого шага, представляет собой конечный выключатель, контакты которого замкнуты только при нулевом шаге лопастей винта; М – приводной электродвигатель винта, для вращения винта; ПП – переключатель постов управления; ПУ1- пост управления на крыле левого борта; ПУ2 – то же, в рулевой рубке; ПУ3- то же, на крыле левого борта; ПУ0 – то же, в ЦПУ; РУ – распределительное устройство (щит электропитания); РШ – регулятор шага винта, для выработки напряжения,; ЭГП – электрогидравлический преобразователь; РЗ – распределительный золотник; 1 – рычаг, для передачи информации о положении лопастей в ЛПШ и ДНШ; 2 – сервомотор, для создания усилия, поворачивающего лопасти винта; 3 – шток сервомотора, для передачи усилия от поршня сервомотора 2 к кондуктору 5; 4 – коническая зубчатая передача, для передачи вращающего момента электродвигателя на ступицу винта (т.е. для вращения винта); 5 – кондуктор, устройство для непосредственного разворота лопастей винта.
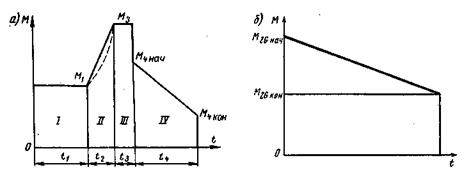
22. Прочитать и объяснить нагрузочные диаграммы электропривода брашпиля при подъеме одного (а) и двух (б) якорей; Нагрузочной диаграммой электропривода называют зависимость мощности, тока или момента электродвигателя от времени. Нагрузочная диаграмма электропривода брашпиля – это зависимость момента на валу электродвигателя от времени (рис. 12.4). Рассмотрим нагрузочные диаграммы электропривода брашпиля при подъеме 1-го якоря с полной расчётной глубины стоянки (рис. 12.5,а) и 2-х якорей с половинной расчётной глубины (рис. 12.5, б). Режим подъёма одного якоря. При стоянке судна на якоре один конец якорной цепи с якорем лежит на грунте, а второй проходит через клюз и якорную звёздочку в цепной ящик. Провисающая в воде часть цепи “а” находится под действием внешних сил, действующих на судно: силы ветра F Увеличение натяжения цепи вызывает подъём части цепи с грунта, при этом увеличивается длина её провисающей части. Процесс снятия судна с якоря делится на 4 стадии (рис. 12.4).
Рис.12.4. Процесс снятия судна с якоря В стадии 1 брашпиль выбирает цепь, втягивая её звенья в клюз. При этом судно под действием усилия в цепи, созданного работой электродвигателя брашпиля, движется с небольшой скоростью к месту залегания якоря. Количество звеньев, втягиваемых в клюз, равно количеству звеньев, поднятых с грунта, поэтому форма провисающей части цепи «б» не изменяется. Значит, сила натяжения цепи у входа в клюз и момент М Стадия 1 заканчивается, когда с грунта будет поднято последнее свободно лежащее звено цепи. На этой стадии скорость выбирания якоря увеличивается, как правило, от 9 до 12 м / мин.
Рис. 12.5. Нагрузочные диаграммы электропривода брашпиля при подъеме одного (а) и двух (б) якорей 23. Прочитать и объяснить нагрузочную диаграмму электропривода при работе одной лебедки; Электроприводы ГПМ работают в повторно-кратковременном режиме, который в соответствии с международной классификацией обозначается S3. Этот режим характеризуется частыми пусками и остановками электродвигателя ГПМ. В общем виде цикл работы грузовой лебедки состоит из следующих 8 операций: 1. подъем груза; 2. перенос груза в горизонтальной плоскости; 3. опускание груза; 4. расстропка груза; 5. подъем холостого гака; 6. обратное перемещение гака в горизонтальной плоскости; 7. опускание холостого гака; 8. застропка груза. Грузовые операции могут осуществляться одной лебедкой, двумя лебедками или грузовым краном. Для обоснованного выбора режима эксплуатации ЭП, а также для выбора ЭД по мощности необходимо прежде всего знать, как изменяется нагрузка на валу ЭД во вре- мени. С этой целью используют нагрузочные диаграммы, представляющие собой зависимость момента на валу двигателя от времени, т.е. М (t).
|
||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 644; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.11 (0.013 с.) |



 . На выходном (третьем) валу МД получается разность между заданным и истинным значениями курса, которая характеризуется углом откло-
. На выходном (третьем) валу МД получается разность между заданным и истинным значениями курса, которая характеризуется углом откло-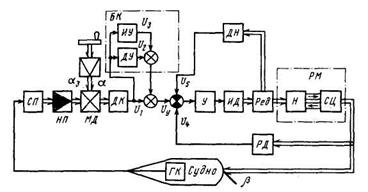
 и силы течения воды Fт. Чем больше эти силы, тем сильнее натянута якорная цепь.
и силы течения воды Fт. Чем больше эти силы, тем сильнее натянута якорная цепь.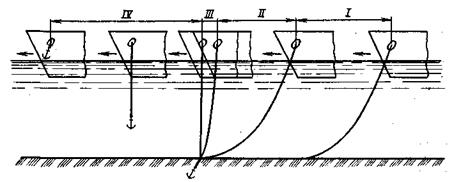
 на валу электродвигателя на этой стадии не изменяются (рис. 12.5, а).
на валу электродвигателя на этой стадии не изменяются (рис. 12.5, а).