Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Устройство и принцип действия асинхронного тахогенератораСодержание книги
Поиск на нашем сайте
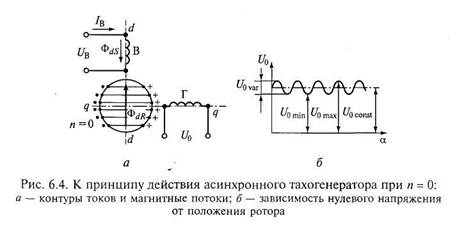
Асинхронные тахогенераторы по своей конструкции не отличаются от двухфазных асинхронных исполнительных двигателей с полым немагнитным ротором. Так же как и двигатели, они имеют на статоре две фазные обмотки, оси которых смещены в пространстве относительно друг друга на угол 90°. Одна из них B (рис. 6.4, а) подключается к сети и называется обмоткой возбуждения. С другой обмотки Г снимается выходное напряжение тахогенератора. Эта обмотка называется выходной, или генераторной. В зависимости от места расположения обмоток различают три конструктивные формы асинхронных тахогенераторов: с обмотками только на внешнем статоре; с обмотками только на внутреннем статоре; с одной обмоткой на внешнем статоре и одной — обычно обмоткой возбуждения — на внутреннем. Полый ротор асинхронного тахогенератора в отличие от ротора исполнительного двигателя с целью обеспечения большого активного сопротивления, мало меняющегося при изменении температуры, выполняется (в точных тахогенераторах) из константана, специального манганина, фосфористой или марганцовистой бронзы и т. п. Рассмотрим сначала физические процессы, протекающие в асинхронном тахогенераторе при n = 0. При неподвижном роторе (n = 0) ток обмотки возбуждения создает пульсирующий по продольной оси d магнитный поток Ф dS, который, пронизывая ротор, наводит в нем ЭДС трансформации (см. рис. 6.4, а). Контуры токов ротора от ЭДС трансформации располагаются в плоскостях, перпендикулярных продольной оси d — оси потока возбуждения Ф dS. Эти токи создают магнитный поток ротора Ф dR, направленный навстречу потоку возбуждения Ф ds и, который, как в любом трансформаторе, компенсируется возрастающим током первичной обмотки — обмотки возбуждения.
Теоретически при неподвижном роторе (n = 0) в тахогенерато-ре магнитный поток имеется только по продольной оси — оси обмотки возбуждения, поэтому в генераторной обмотке, ось которой смещена на 90° к обмотке возбуждения, никаких ЭДС наводиться не должно. Однако у всех тахогенераторов и при n = 0 на зажимах генераторной обмотки имеется некоторое незначительное напряжение, которое называется нулевым или остаточным. Нулевое напряжение U0 — напряжение при n = 0 — явление весьма нежелательное. Причины его возникновения весьма разнообразны: а) неточный сдвиг обмоток; б) несимметрия магнитной цепи из-за разной проводимости стали вдоль и поперек проката, наличия короткозамкнутых контуров, неравномерности воздушного зазора; в) наличие потоков рассеяния; г) наличие емкостных связей между обмотками, особенно заметных в тахогенераторах с повышенной частотой питающего напряжения; д) несимметрия полого ротора и т.п. Большинство указанных причин приводят к тому, что в тахогенераторе при n = 0 появляется поперечная составляющая магнитного потока, которая наводит ЭДС E0 в генераторной обмотке. Значение нулевого напряжения U0 не остается постоянным при повороте ротора (рис. 6.4, б). Его можно разделить на постоянную U0 const и переменную U 0var составляющие. Постоянная составляющая U0 const, обусловленная причинами, указанными ранее в пунктах «а...г», у большинства тахогенераторов находится в пределах от 25 до 100 мВ. Переменная составляющая U0var = U0max – U0min (см. рис. 6.4, б) зависит в основном от толщины, т.е. неодинаковой электрической проводимости полого ротора в различных направлениях (от его несимметрии). Она обычно составляет 3...7 мВ. Для борьбы с постоянной составляющий нулевого напряжения очень часто обмотки возбуждения и генераторную размещают на разных статорах: одну — на внутреннем, другую — на внешнем. При сборке тахогенератора внутренний статор поворачивают относительного внешнего, находят положение, соответствующее U0min, и в этом положении фиксируют. В целях борьбы с переменной составляющей нежелательного нулевого напряжения тщательно обрабатывают и калибруют ротор, добиваясь его максимальной симметрии в электрическом отношении. К уменьшению переменной составляющей остаточного напряжения ведет увеличение числа p пар полюсов обмоток статора. Как уже говорилось ранее, обычно 2 p > 4.
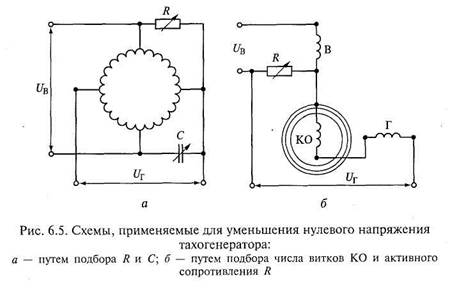
В целом ряде тахогенераторов для борьбы с нулевым напряжением применяются специальные схемы. Они весьма разнообразны. На рис. 6.5 в качестве примера показаны две наиболее простые из них. В первой схеме (см. рис. 6.5, а) нулевое напряжение уменьшается путем подбора R и С, во второй (см. рис. 6.5, б) — путем подбора числа витков компенсационной обмотки (КО), расположенной на внутреннем статоре, и значения активного сопротивления R. Недостатки этих схем: во-первых, неполное устранение U0; во-вторых, наличие электрической связи между обмотками возбуждения и генераторной. При вращении ротора (n ≠0) его «волокна» — элементарные проводники пересекают магнитный поток возбуждения Ф dS, и в них, кроме ЭДС трансформации, наводится еще ЭДС вращения (резания). Под действием ЭДС вращения по ротору протекают токи, контуры которых при большом активном сопротивлении ротора практически совпадают с осью потока возбуждения Ф dS (рис. 6.6). Эти токи создают свой магнитный поток ротора Ф dR, который направлен по поперечной оси q тахогенератора. Поток Ф dR, сцепляясь с витками генераторной обмотки Г, наводит в них ЭДС ЕГ — выходную ЭДС тахогенератора. Частота этой ЭДС равна частоте сети. Действительно, так как ЕГ = ωг × (d Ф qR / dt), то ее частота равна частоте изменения потока Ф qR, вызываемого токами от ЭДС вращения. Частота ЭДС вращения при n = const равна частоте изменения во времени потока Ф dS, которым она наводится: Евр ~ Ф dSn; таким образом, частота изменения ЕГ во времени равна частоте питающей сети — напряжения U B.
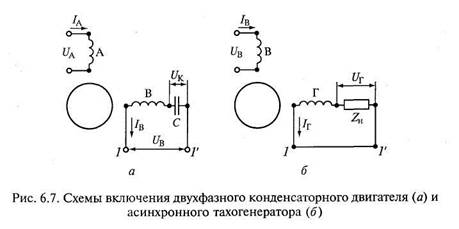
ЭДС вращения ротора ЕqR, поток ротора Ф qR поперечной оси и выходная ЭДС ЕГ тахогенератора по значению (амплитуде) пропорциональны частоте вращения ротора n, т.е. ЕГ ~ Ф qR ~ n. Выходное напряжение тахогенератора UГ меньше ЭДС ЕГ на значение падения напряжения на сопротивлении ZГ генераторной обмотки, т. е. UГ = ЕГ - IГZГ. На рис. 6.7, а представлена схема включения двухфазного несимметричного асинхронного двигателя с конденсатором C в цепи обмотки В. На рис. 6.7, б представлена схема включения асинхронного тахогенератора. Сравнивая эти схемы, нетрудно заметить, что они весьма похожи друг на друга, только в схеме тахогенератора зажимы 1 —Г, на которые у двигателя подается напряжение UB, замкнуты накоротко; следовательно, у тахогенератора UB = 0. Также в схеме тахогенератора вместо конденсатора С включено сопротивление нагрузки Z H. Выходное напряжение тахогенератора UГ может быть найдено как падение напряжения на сопротивлении Z H нагрузки:
К положительным качествам асинхронных тахогенераторов, которые способствуют их весьма широкому распространению, следует отнести: бесконтактность — отсутствие скользящих контактов; малоинерционность, обусловленную малым моментом инерции ротора;
наличие малого момента сопротивления (трения в подшипниках и тормозящего электромагнитного) вследствие отсутствия радиальных и аксиальных сил, действующих на ротор; большую надежность; неплохую стабильность характеристик. Недостатками асинхронных тахогенераторов, ограничивающих области их применения, являются: теоретическая и практическая нелинейность выходной характеристики; наличие фазовой погрешности; наличие нулевого (остаточного) напряжения; малая выходная мощность, что приводит к необходимости увеличения габаритных размеров (асинхронный тахогенератор в 2...4 раза больше тахогенератора постоянного тока с такой же выходной мощностью); низкий cosφ; большие габаритные размеры и масса. Однако несмотря на наличие ряда существенных недостатков, асинхронные тахогенераторы с полым ротором как у нас, так и за рубежом выпускаются в больших количествах.
Синхронные тахогенераторы
Большое распространение в настоящее время получили синхронные тахогенераторы, конструктивно представляющие собой однофазные (а иногда и трехфазные) синхронные генераторы малой мощности с ротором, имеющим явно выраженные полюсы и выполненным в виде постоянного магнита — звездочки. Благодаря выполнению возбуждения достоянным магнитом в синхронном тахогенераторе отсутствуют скользящие контакты, что значительно повышает его надежность. При вращении ротора тахогенератора в обмотке его статора наводится ЭДС, амплитуда которой прямо пропорциональна частоте вращения n:
где f = pn /60 — частота генерируемой ЭДС; wГ — эффективное число витков обмотки статора; Ф — магнитный поток; k = 4,44(рwГ /60)Ф — постоянный (при Ф = const) коэффициент, равный крутизне выходной характеристики; p — число пар полюсов. Применение синхронных тахогенераторов в ряде схем затруднительно вследствие того, что у них одновременно с амплитудой при изменении частоты вращения n изменяется и частота f выходного напряжения. Изменение частоты приводит к изменению значения реактивных сопротивлений XL = 2π fL и Xс = 1/(2π fC) как самого тахогенератора, так и нагрузки, на которую он работает. Это ведет к искажению выходной характеристики и к появлению погрешностей. При определенных условиях вследствие возникновения резонансных явлений работа синхронного тахогенератора не удовлетворяет требованиям схем автоматики. В схемах автоматики, работающих на частотном принципе, непостоянство частоты/ (пропорциональность ее частоте вращения n), наоборот, считается весьма положительным качеством синхронного тахогенератора. Положительным качеством всех без исключения синхронных тахогенераторов является то, что они при малых габаритных размерах имеют большую выходную мощность.
|
||
|
|
Последнее изменение этой страницы: 2016-06-26; просмотров: 969; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.220 (0.011 с.) |