Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Автоматика и автоматизация технологических процессовСодержание книги
Поиск на нашем сайте
Автоматика и автоматизация технологических процессов
МЕТОДИЧЕСКИЕ УКАЗАНИЯ К лабораторным работам для студентов специальности Машины и аппараты легкой, текстильной Промышленности и бытового обслуживания»
ВИТЕБСК УДК 681.5 ББК 32.965 А-22
Автоматика и автоматизация технологических процессов: методические указания к выполнению лабораторных работ для студентов 1-36 08 01 «Машины и аппараты легкой, текстильной промышленности и бытового обслуживания».
Составители: ст. преподаватель Клименкова С.А., ст. преподаватель Ринейский К.Н., ст. преподаватель Давыдько А.П.
Методические указания составлены в соответствии с программами курса «Автоматика и автоматизация технологических процессов» и содержат лабораторные работы по указанному курсу и перечень используемой литературы.
Методические указания составлены в соответствии с требованиями, предъявляемыми к выполнению лабораторных работ.
Одобрено кафедрой «Автоматизации технологических процессов и производств» УО «ВГТУ»
«_ 15 ___»декабря 2006г, протокол №__ 6 __
Рецензент: доцент Смелков Д.В. Редактор: доцент Сычев И.Ю.
Рекомендовано к опубликованию редакционно-издательским Советом УО «ВГТУ» “___” _________ 2006 г, протокол № ____
Ответственный за выпуск: Букин Ю.А.
Подписано к печати_________ Формат_________ Учетно-изд. лист._____
Печать ризографическая. Тираж___ экз. Заказ №________ Цена___ руб.
Отпечатано на ризографе Учреждения образования «Витебский государственный технологический университет». Лицензия № 02330/0133005 от 01.04.2004 210035. Витебск, Московский пр., 72.
Содержание
Лабораторная работа №1 Градуирование электровлагомера............................... 4 1.1. Общие положения. 4 1.2. Порядок выполнения работы.. 5 1.3. Контрольные вопросы.. 6 Лабораторная работа № 2 Исследование параметров электромагнитных реле 7 2.1. Общие положения. 7 2.2. Порядок выполнения работы.. 11 2.3. Контрольные вопросы.. 14 Лабораторная работа №3 Экспериментальное определение математической модели объекта регулирования 14 3.1. Общие положения. 14 3.2. Порядок выполнения работы.. 18 3.3. Контрольные вопросы.. 18 Лабораторная работа № 4 Исследование автоматической системы позиционного регулирования температуры теплового объекта. 19 4.1. Общие положения. 19 4.2. Порядок выполнения работы.. 22 4.3. Контрольные вопросы.. 26 Лабораторная работа № 5 Определение качественных показателей линейной системы регулирования. 26 5.1. Общие положения. 26 5.2. Порядок выполнения работы.. 32 5.3. Контрольные вопросы.. 32 Лабораторная работа № 6 Изучение схем автоматического связывания нескольких асинхронных двигателей. 32 6.1. Общие положения. 32 6.2. Порядок выполнения работы.. 36 6.3. Контрольные вопросы.. 37 Лабораторная работа № 7 Синтез циклических систем управления. 38 7.1. Общие положения. 38 7.2. Порядок выполнения работы.. 41 7.3. Контрольные вопросы.. 42 Лабораторная работа № 8 Исследование работы сельсинных схем 43 8.1. Общие положения. 43 8.2. Порядок выполнения работы.. 43 8.3. Контрольные вопросы.. 46 Лабораторная работа №9 Исследование магнитного усилителя……… ………46 9.1. Общие положения. 46 9.2. Порядок выполнения работы.. 48 9.3. Контрольные вопросы.. 51
Литература 52
Градуирование электровлагомера Цель работы: Ознакомиться с методами и приборами, применяемыми для измерения влажности. Научиться торировать электровлагомер (снимать градуировочную кривую). Общие положения Электрические методы оценки влажности материалов вследствие их простоты, малых затрат времени в процессе измерений нашли применение во многих отраслях легкой промышленности. По принципу действия и в зависимости от измеряемого электрического параметра материала электрические влагомеры делят на две группы. В приборах первой группы оценка влажности материала производится по результатам измерения электрической проводимости или сопротивления. Приборы этой группы называются электровлагомерами сопротивления или кондуктометрическими электровлагомерами. Электровлагомер сопротивления представляет собой сочетание датчика и измерителя больших сопротивлений. От датчика требуется точное воспроизведение условий измерений в каждом опыте, для чего необходимо обеспечить надежное соприкосновение электродов датчика с материалом. В приборах второй группы оценка влажности материала производится по результатам измерения диэлектрической проницаемости. Приборы этой группы называют емкостными электровлагомерами. Принцип действия емкостного электровлагомера основан на различии величин диэлектрической проницаемости сухого материала и влаги. При использовании такого метода измерения проводятся на переменном токе высокой частоты, в результате измерения определяется емкостное сопротивление датчика. Измерительное устройство емкостного влагомера сложнее влагомера сопротивления. Конструктивное оформление датчика тесно увязывается со свойствами контролируемого материала. Так, для тканей нашли применение датчики в форме роликов, между которыми располагается материал рис.1.1 a, для кож - игольчатые датчики, вкалываемые в материал рис.1.1 б.
а) б) Рис 1.1 Датчики а) – роликовые, б) - игольчатые
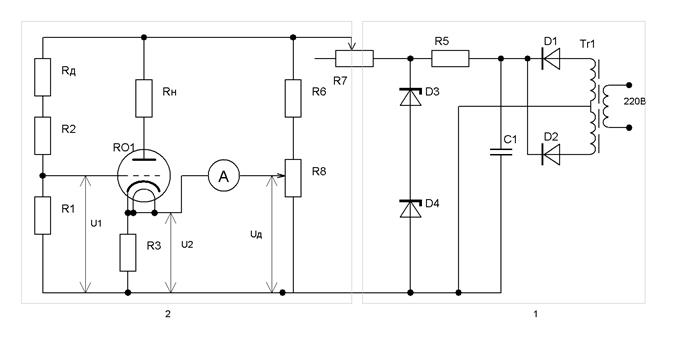
Рассмотрим устройство и работу измерительной схемы влагомера сопротивления типа ЭВ- 2К. Прибор рис.1.2 состоит из стабилизированного блока питания (1) измерительного устройства (2). Стабилизированный блок питания включает понижающий трансформатор Тr1, выпрямитель на диодах D1 и D2, сглаживающий конденсатор и параметрический стабилизатор напряжения, образованный резистором R5 и стабилитронами D3 и D4. На выходе блока питания включен переменный резистор R7, служащий для регулировки напряжения питания.
Рис 1.2 Измерительная схема влагомера сопротивления типа ЭВ- 2К
Измерительное устройство содержит основной делитель напряжения на резисторах RД; R1; R2, усилитель постоянного тока, выполненный на лампе R01, и вспомогательный делитель напряжения на резисторах R6; R8. Между катодом лампы и движком переменного резистора R8 включен измерительный прибор А. Вспомогательный делитель напряжения служит для установки стрелки измерительного прибора на НШ при настройке прибора, перемещением подвижного контакта резистора R8. При изменении влажности исследуемого материала, изменяется сопротивление датчика RД. Т.к. датчик включен в цепь основного делителя напряжения, то изменение величины RД приведет к изменению выходного напряжения U1, подводимого к управляющей сетке лампе R01. Изменение U1 приводит к изменению анодного тока IА и, соответственно, напряжения U2 на катодном сопротивлении R3. Неравенство напряжения U2 и UД приводит к появлению разности напряжений ∆U= U2-UД на зажимах А. Через измерительный прибор при этом течет ток Iил=∆U/Rип, что вызывает отклонение стрелки на величину α= к Iип. Поскольку изменение тока Iип пропорционально сопротивлению датчика, то шкалу прибора можно отградуировать в единицах влажности исследуемого материала, т.е. каждому значению тока поставить в соответствие определенное значение влажности. Порядок выполнения работы 1. Включить электровлагомер в электрическую сеть и подготовить его к работе. Перед измерениями выверить края шкалы прибора: рукояткой ”Установка НШ” при свободном датчике установить стрелку прибора на отметку “Н” (только на первом диапазоне 0+22). Рукояткой “Установка КШ” при нажатой кнопке установить стрелку прибора на отметку “КШ”. 2. Произвести градуировку электровлагомера, для чего: образец взвесить на аналитических весах; снять показания электровлагомера (образец прокалывается датчиком последовательно в трех местах и определяется среднее показание); поместить исследуемый образец в сушильный шкаф и выдержать в течение 25+30 сек. Измерения по пункту 2 последовательно повторить 4-5 раз до полного высушивания образца. Влажность определяется выражением: W= m-m0/m, где m- масса влажного материла, m0- масса сухого материала. Данные градуировки занести в протокол градуировки и, взяв среднеарифметическое результатов измерения влажности образцов, построить градуировочную кривую влагомера (табл. 1.1). Таблица 1.1 Протокол градуировки Электровлагомер типа _________________ для материала_____________ при температуре окружающей среды ____________
Содержание отчета Цель работы. Схема и краткое описание принципа действия электровлагомера. Протокол градуировки. Градуировочная кривая W= f(n). Выводы по результатам исследований 1.3. Контрольные вопросы 1. Методы измерения влажности. 2. Кондуктометрический метод измерения влажности. 3. Емкостные электровлагомеры и принцип их действия. 4. Пояснить схему и принцип действия электровлагомера ЭВ-2К.
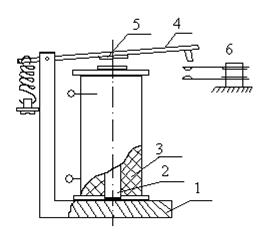
Лабораторная работа № 2 Общие положения Электромагнитные реле предназначены для коммутации электрических цепей устройств электроавтоматики. Различают реле постоянного тока и переменного тока. На рис.2.1 показано устройство реле постоянного тока, где отмечены – корпус 1, сердечник 2, обмотка 3, якорь 4, штифт отлипания 5, контактные пружины 6, возвратная пружина 7.
Рис. 2.1 Реле постоянного тока
При прохождении по обмотке тока возбуждается магнитный поток, который, проходя по магнитопроводу, замыкается через воздушный зазор. В этом случае якорь притягивается к сердечнику, что приводит к замыканию или размыканию соответствующих контактов.
Рис. 2.2. График переходного процесса работы реле постоянного тока
Наиболее важными параметрами электромагнитных реле являются: токи срабатывания Iср и отпускания Iотп, коэффициент запаса Kз= Порядок выполнения работы. 1. Собрать схему (рис. 2.10). Определить напряжение и ток срабатывания реле. Определить напряжение и ток отпускания реле. Примечание: Uном принято равным 24 В, а Iном = 1,35 мА. 2. По данным п.1. определить Кв = 3. Собрать схему, представленную на (рис. 2.10). Определить tср реле для указанных в табл. 1 напряжений. Таблица 2.1.
4. Собрать схему, представленную на (рис. 2.11). Определить реле для указанных в табл. 2.2 напряжений. Подключить в соответствии с рис. 8 диод и для U = Uном определить время отпускания реле. 5. Собрать схему (рис. 2.12) и определить зависимость времени срабатывания реле от величины Rд. При изменении Rд устанавливать ток в обмотке реле. Таблица 2.2
Iр = Iном = 1,35 мА изменением напряжения источника питания. Данные занести в табл.2.3. Таблица 2.3
6. Собрать схему (рис. 2.13) и определить зависимость времени срабатывания реле от величины Rд и Сд. При изменении Rд устанавливать ток в обмотке реле Iр = Iном = 1,35 мА изменением напряжения источника питания. Данные занести в табл.2.4. Таблица 2.4
7. Собрать схему (рис. 2.14) и определить зависимость времени срабатывания реле от величины Rд и Сш при Iр = Iном = 1,35 мА. Данные занести в табл. 2.5. Таблица 2.5
8. Собрать схему (рис. 2.15) и определить зависимость времени отпускания реле от Сш при Iр = Iном = 1,35 мА. Установить Rд = 16,0 кОм для всех значениий Сш. Данные занести в табл. 2.6. Таблица 2.6
9. Собрать схему (рис. 2.16) и определить зависимость времени срабатывания реле от величин Rд и Rш при Iр = Iном = 1,35 мА. Данные занести в табл. 2.7. Таблица 2.7
10. Собрать схему (рис. 2.17) и определить зависимость времени отпускания реле от величины Rш Rд = 16,0 кОм и Iр = Iном = 1,35 мА. Данные занести в табл. 2.8. Таблица 2.8
Рис 2.10 Схема для определения Рис. 2.11 Схема для определения времени срабатывания реле времени размыкания реле
Рис. 2.12 Схема с добавочным Рис. 2.13 Схема с форсирующей сопротивлением (срабатывания) цепью (срабатывания)
Рис. 2.14 Схема с интегрирующей Рис. 2.15 Схема с интегрирующей цепью (срабатывания) цепью (размыкание)
Рис. 2.16 Схема с делителем Рис. 2.17 Схема с делителем напряжения (срабатывания) напряжения(размыкание) Содержание отчета Цель работы. Принципиальные схемы включения реле. Таблицы экспериментальных данных. Графики зависимостей, полученных экспериментально. Выводы по результатам исследований. 2.3. Контрольные вопросы 1. Объяснить принцип действия и назначения элементов конструкции реле. 2. Дать определения времени срабатывания и времени отпускания реле. 3. Привести схемы и объяснить методы ускорения срабатывания реле. 4. Привести схемы и объяснить методы замедления срабатывания реле. 5. Привести схемы и методы замедления отпускания реле. 6. Привести блок-схему и объяснить принцип действия электросекундомера.
Лабораторная работа №3 Общие положения При математическом описании (идентификации) любого объекта управления его поведение можно рассматривать в условиях статики (установившиеся режимы работы) и динамики (переходные режимы). Для условий статики все возмущающие воздействия “f” и все управляющие “u” считаются постоянными величинами, не зависящими от времени. Статические режимы описываются алгебраическими уравнениями, связывающими регулируемые (выходные) параметры “y” с входными воздействиями “f” и “u”.
где j - некоторая векторная функция не зависящих от времени “f” и “u”. Графическое представление зависимости Динамические режимы описываются обычно дифференциальными или интегрально-дифференциальными уравнениями, определяющими зависимость y(t) от изменения воздействий f(t) и u(t).
Различают объекты с самовыравниванием (устойчивые), без самовыравнивания (нейтральные) и неустойчивые. Объект устойчив, если после кратковременного внешнего воздействия он с течением времени стремится к исходному состоянию. Нейтральными называются такие объекты, которые по окончании воздействия стремятся к новому состоянию равновесия, зависящему от величины воздействия. Если управляемая координата y(t) после прекращения воздействия продолжает изменяться, то объект называют неустойчивым. Для составления математической модели объекта используют аналитические и экспериментальные методы. При аналитическом методе составляются уравнения динамики объекта на основе физических законов, определяющих процессы, происходящие в объекте (например, закон сохранения вещества или энергии, закон Кирхгофа и т. п.). Математические выражения соответствующих физических законов, характеризующих поведение объекта, и являются дифференциальными уравнениями, описывающими динамику объекта управления. При аналитическом методе идентификации приходится прибегать в большинстве случаев к идеализации сложных реальных процессов и считать, что объекты обладают детектирующими (однонаправленными) свойствами. Поэтому аналитические методы позволяют лишь приближенно оценить динамические свойства реального объекта. Экспериментальных методов идентификации много, рассмотрим простейшие из них. Для экспериментального определения модели объекта можно использовать временные или частотные динамические характеристики. Временные динамические характеристики представляют собой графики изменения во времени регулируемого (выходного) параметра объекта в зависимости от вида входного воздействия (испытательного воздействия). При подаче в качестве испытательного воздействия дельта-функции d(t) (единичного импульса) получаем импульсную переходную характеристику; уравнение, описывающее эту кривую, называют функцией веса w(t). При подаче на вход объекта единичного ступенчатого воздействия I(t) (единичного скачка), получаем переходную характеристику, ее уравнение - переходная функция h(t). Или иначе: реакция объекта на единичный импульс называется функцией веса w(t), а на единичный скачок - переходной функцией h(t). Достоинство временных характеристик - простота постановки эксперимента. С помощью временных характеристик наиболее просто определяются передаточные функции первого и второго порядка. Идентификация объекта по частотным характеристикам предпочтительнее, т.к. позволяет найти модель и нелинейного объекта, однако требуется более сложный эксперимент. Частотные характеристики показывают изменение модуля и фазы комплексного коэффициента передачи объекта при изменении частоты 0<w<¥. Математическую модель объекта по экспериментально снятым динамическим характеристикам определяют достаточно просто: - по виду графика динамической характеристики, сравнивая его с графиком соответствующей динамической характеристики типовых звеньев, определяют уравнение динамической характеристики, тип дифференциального уравнения динамики объекта; - по динамической характеристике определяют коэффициенты дифференциального уравнения и передаточную функцию объекта. Затем определяют адекватность модели. Математическая модель считается адекватной, если значение параметра на выходе объекта совпадает со значениями, рассчитанными по модели. Постановка эксперимента по снятию временных динамических характерстик. Если экспериментальные исследования проводятся на действующем промышленном объекте, то целесообразно снять импульсную переходную характеристику, т.к. это не вызовет существенного изменения технологических переменных. В остальных случаях можно снимать переходную характеристику. Для записи изменения выходного параметра во времени необходим записывающий вторичный прибор, к которому подключается датчик (первичный преобразователь). Если снимается временная динамическая характеристика теплового объекта, то выходным параметром является температура. Возмущающее воздействие для теплового объекта с электрообогревом можно создать изменением напряжения, подаваемого на нагревательный элемент. Для снятия импульсной переходной характеристики необходимо резко увеличить напряжение на некоторую величину и через некоторое время (выбирается в зависимости от свойств объекта) снова снизить его до первоначального уровня. Реакция на импульс для инерционного объекта будет иметь следующий вид (рис. 3.1):
Рис. 3.1 График импульсной переходной характеристики
где К- коэффициент передачи; Т - постоянная времени, оценивает инерционные свойства объекта и показывает, за какое время закончился бы переходный процесс, если бы он шел с постоянной скоростью. Практически же переходный процесс заканчивается за время, равное t=(3¸4)Т. Для снятия переходной характеристики теплового объекта необходимо резко изменить (увеличить) напряжение, подаваемое на нагревательный элемент, т.е. изменять входной сигнал в виде ступеньки. Реакция на единичное ступенчатое воздействие и есть переходная характеристика для инерционного объекта. (рис. 3.2). Коэффициент передачи К определяется следующим образом:
Рис. 3.2 График переходной характеристики для инерционного объекта
Постоянная времени Т может быть определена: а) по реакции подкасательной на линию установившихся значений (касательная может проводиться в любой точке) - если кривая – экспонента (рис.3.2); б) по проекции подсекущей на линию установившегося значения (рис. 3.3).
Рис. 3.3 Получение Т методом подсекущей
Если y(t) не имеет точек перегиба и представляет собой экспоненту, то исследуемый объект управления является инерционным первого порядка и уравнение имеет вид: При t=T:
Согласно уравнению переходной характеристики, за время, равное T, переходный процесс заканчивается на 0,63 своего установившегося значения (рис. 3.4). После завершения переходного процесса на выходе объекта управления установившееся значение: Кхвх.=h(¥)=Y(¥). Следовательно, если нет запаздывания, то постоянную времени можно определить и таким образом:
Рис 3.4
Порядок выполнения работы 1. Собрать схему лабораторной установки, изображенной на рис.3.5. 2. Снять переходную характеристику, для чего на объект подать напряжение 36В (подключить нагревательный элемент к сети). 3. Определить математическую модель объекта регулирования, сравнивая полученную переходную характеристику с характеристиками типовых звеньев. 4. Определить коэффициенты модели T и K и передаточную функцию W(p).
Рис. 3.5 Схема лабораторной установки
Содержание отчета Цель работы. Схема лабораторной установки. График переходной характеристики. Математическая модель и коэффициенты. Выводы по результатам исследований.
3.3. Контрольные вопросы 1. Что такое математическая модель и как она может быть экспериментально получена? 2. Определение математической модели теплового объекта и ее коэффициентов. 3. Что такое Т, как определяется и что означает? 4. Что такое К, как определяется и что означает? Лабораторная работа № 4 Общие положения Позиционные регуляторы приборного типа являются самыми простыми и широко распространенными. К числу важнейших преимуществ позиционных регуляторов относится возможность получения высокого качества регулирования при применении достаточно простых и надежных технических средств. Они широко применяются при автоматизации тепловых объектов с электрообогревом; насосных и компрессорных установок, в которых требуется ограничение изменения уровня перекачиваемой в резервуар жидкости; стабилизации давления в паропроводах, трубопроводах - подачи сжатого газа; при регулировании частоты вращения двигателей постоянного тока и напряжения генераторов.
Рис. 4.1 Функциональная схема двухпозиционного регулирования
Позиционное регулирование легко организуется на основе переключающих устройств, устанавливаемых на показывающих стрелочных приборах, в автоматических измерительных компенсаторах. Такие важные особенности этих систем, как простота технического решения задачи управления подачей электрической энергии путем включения и выключения источника питания (рис.4.2), особенно в случае объектов, имеющих небольшие габаритные размеры (нагревательные плиты, валы прессового оборудования, электрические калориферы, двигатели с вентиляторами для систем кондиционирования), удобство сочетания позиционного (релейного) элемента с двигателями постоянной скорости в исполнительном устройстве управления расходом жидкости (газа) с помощью клапана, заслонки и других элементов запорной арматуры технологического оборудования и определяют широкое применение этих систем (рис.4.3).
Рис.4.2 Схема управления АСР путем вкл. и выкл. источника питания
Рис 4.3 Cхема управления АСР с использованием сочетания позиционного элемента с ДПТ
На рис 4.1 и 4.2 показаны функциональная и принципиальная схемы двухпозиционного регулирования температуры в объекте с электронагревателем. На рис.4.3 принципиальная схема двухпозиционного регулирования напряжения генератора постоянного тока. В двухпозиционных АСР регулирующий орган может последовательно занимать два положения (позиции), чему соответствует минимальное или максимальное регулирующее воздействие на объект регулирования. Если в качестве выходного элемента двухпозиционного регулятора используется электромагнитное реле, то это реле, в зависимости от текущего значения регулируемой величины будет находиться в процессе регулирования только в 2-х состояниях - включенном и выключенном. В результате возникает характерный для рассматриваемого класса АСР периодический процесс изменения регулируемой величины относительно заданного значения - автоколебания. На рис.4.4 приведена структурная схема двухпозиционной АСР и установившиеся автоколебания регулируемой величины. На этом рисунке Х3 - заданное значение регулируемой величины (сигнал, поступающий в регулятор от задатчика); Х - истинное значение регулируемой величины (сигнал, поступающий в регулятор с датчика), D=Х3-Х - сигнал рассогласования, ДР - двухпозиционный регулятор, Z - команда управления (регулирующее воздействие);
Рис.4.4 Двухпозиционная АСР а) – структурная схема, б) – график переходного процесса
Пример статических характеристик двухпозиционного регулятора приведен на рис. 4.5. На рис. 4.5 а показана статическая характеристика без зоны неоднозначности (идеальная статическая характеристика), на рис. 4.5 б - с зоной неоднозначности (реальная статическая характеристика). Для приближенного анализа автоколебаний в системе двухпозиционного регулирования с регулятором, имеющим зону неоднозначности 2Σ и объектом с запаздыванием, у которого
Рис.4.5 Статические характеристики двухпозиционного регулятора а) – без зоны неоднозначности, б) – с зоной неоднозначности С.М.Смирновым получены формулы, позволяющие рассчитать размах автоколебаний и их период. Относительный (безразмерный) размах автоколебаний
где 2σ - относительная (безразмерная) зона неоднозначности регулятора; Т - постоянная времени объекта регулирования; τ - время запаздывания. Относительная зона неоднозначности где 2Σ - зона неоднозначности регулятора; А=Хmax-Хmin - зона регулирования, оцениваемая по разности установившихся значений регулируемой величины при максимальном и минимальном значениях регулирующего воздействия Umax и Umin. Размах автоколебаний регулируемой величины
Период автоколебаний регулируемой величины
где
При правильной настройке двухпозиционной АСР установившиеся автоколебания происходят в средней части зоны регулирования. Величина периода автоколебаний в значительной мере сказывается на сроке службы элементов двухпозиционной АСР. При настройке системы на период автоколебаний можно воздействовать только изменением относительной (безразмерной) зоны неоднозначности, точнее А - зоной регулирования.
Весьма важным фактором, обуславливающим качество двухпозиционного регулирования является время запаздывания τ. При наличии запаздывания размах автоколебаний будет тем больше, чем больше 2σ и отношение Порядок выполнения работы Ознакомиться со схемой лабораторной установки, регулятором МР-64-02 и работой двухпозиционной АСР.
Рис.4.6 Схема лабораторной установки двух позиционного регулирования
На рис. 4.6 приведена схема лабораторной установки, по которой осуществляется двухпозиционное регулирование объекта с термообогревом. В качестве регулятора в схеме использован регулирующий милливольтметр МР-64-02, работающий в комплекте с термопарой типа ХК. МР-64-02 измеряет эдс термопары. Требуемое значение температуры задается задатчиком (бесконтактный датчик положения стрелки измерительной части прибора). Электрическая схема регулятора приведена на рис.4.7. Регулятор состоит из двух частей - измерительной и регулирующей. Измерительная часть состоит из рамки, помещенной в поле постоянного магнита. Ток, протекающий через рамку, под действием эдс термопары, создает магнитное поле. Взаимодействие этого поля с полем постоянного магнита вызовет поворот рамки на угол, пропорциональный величине эдс. Регулирующая часть представляет собой бесконтактный датчик положения индуктивного типа. Он состоит из высокочастотного автогенератора, собранного на транзисторе VT1 и катушек индуктивности L1 и L2, и усилителя на трех транзисторах VT2 - VT4. На вход усилителя (транзистор VT2) сигнал подается с катушки индуктивности L3. В коллекторную цепь выходного транзистора VT4 включена обмотка управляющего реле Р1, контакты которого используются для управления объектом. Принцип действия регулирующей части основан на срыве и восстановлении генерации при вводе и выводе экрана, жестко укрепленного на измерительной стрелке прибора, в зазор между катушками автогенератора L1 и L2. Для обеспечения заданной температуры в объекте, указатель регулирующего устройства устанавливается на соответствующую отметку. При температуре в объекте ниже заданной указателем, (стрелка с экраном вне катушек) автогенератор генерирует высокочастотные колебания, транзистор VT4 открыт. Ток проходит через обмотку управляющего реле, контакт которого подключает электронагреватель к сети. При температуре, равной заданной, (стрелка с экраном в зазоре между катушками) генерация срывается, транзистор VT4 закрывается, реле обесточивается, контакт размыкается, электронагреватель обесточивается. При понижении температуры процесс повторяется. Контроль и регистрация изменения температуры в объекте производится с помощью электронного автоматического самопишущего потенциометра типа КСП, работающего в комплекте с термопарой ХК, помещенной в объект рядом с датчиком регулятора МР-64-02. 1. Подготовить к работе электронный автоматический потенциометр, после его прогрева подать на электронагреватель напряжение U=30 В для снятия кривой разгона. 2. После достижения установившегося состояния включить регулятор МР-64-02 и установить с помощью задатчика Х3=1500С. 3. Записать 4-6 периодов установившихся автоколебаний и определить 2Σ, которые определяются по включению и выключению сигнальной лампочки. Таблица 4.1
|
|
Последнее изменение этой страницы: 2016-09-13; просмотров: 403; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.148.115.187 (0.019 с.) |


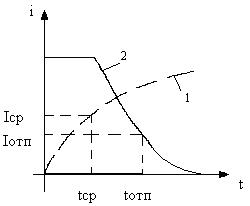
 , коэффициент возврата Кв=
, коэффициент возврата Кв=  , время срабатывания tср и время отпускания tотп. На рис. 2.2 показаны закономерности изменения тока в обмотке реле при его включении (кривая 1) и выключении (кривая 2).
, время срабатывания tср и время отпускания tотп. На рис. 2.2 показаны закономерности изменения тока в обмотке реле при его включении (кривая 1) и выключении (кривая 2). .
.

 ,
, и возмущения
и возмущения  .
. .
.
 .
.
 .
.

 - передаточная функция объекта,
- передаточная функция объекта,  - передаточная функция датчика. При таком объекте автоколебаний может не быть, если τ®0.
- передаточная функция датчика. При таком объекте автоколебаний может не быть, если τ®0.
 .
.
 ,
, ,
, .
. ,
, - коэффициент, характеризующий расположение автоколебаний в зоне регулирования;
- коэффициент, характеризующий расположение автоколебаний в зоне регулирования; - относительное (безразмерное) задаваемое значение регулируемой величины.
- относительное (безразмерное) задаваемое значение регулируемой величины. , поэтому двухпозиционное регулирование рекомендуется применять лишь для регулирования объектов с большими постоянными времени Т и малым временем τ, при этом соотношение
, поэтому двухпозиционное регулирование рекомендуется применять лишь для регулирования объектов с большими постоянными времени Т и малым временем τ, при этом соотношение