Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Схеми Голомбо проти схеми модуляСодержание книги
Поиск на нашем сайте
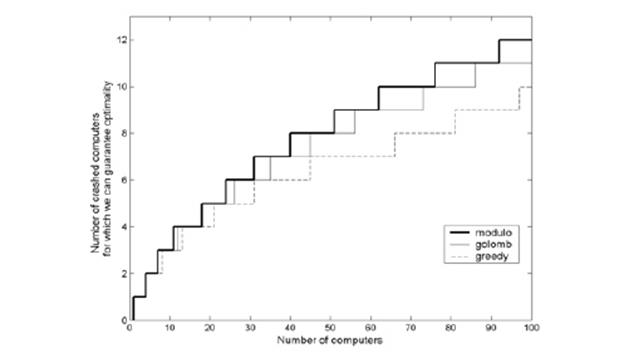
Послідовність модуля може бути визначена як окремий випадок лінійки Голомбо з l позначками d 1 d 2 … dl, з властивістю, що усі У Таблиці 2 модульні послідовності і послідовності Голомбо порівняні. Послідовності рівні для маленьких кластерів. Ми можемо гарантувати оптимальний навантаження, що балансує для більшого номера комп'ютерів з пошкодженнями, якщо ми користуємося послідовностями модуля, ніж послідовності Голомбо, які означає, що схеми Голомбо послідовно більші, ніж схеми модуля, і що залишається близько до вектору BV. Наприклад, в цьому випадку 76
Таб. 1 Порівняння модульної схеми та схеми Голомбо m = к−ть комп’терів в кластері при яких можна гарантувати опримальність використовуючи модульну схему n = к−ть комп’терів в кластері при яких можна гарантувати опримальність використовуючи схему Голомбо;
Висновки У багатьох кластерних і розподілених системах, проектувальник повинен забезпечити схему відновлення. Такі схеми визначають, як робоче навантаження треба перерозподілити, коли один або більше комп'ютерів вимикається. Мета − тримати навантаження, для якомога рівномірного поширення, навіть, коли самі несприятливі комбінації комп'ютерів вимикаюється, тобто ми хочемо оптимізувати поведінку найгіршого випадку. Ми розглядаємо n ідентичні комп'ютери, які за нормальних умов виконують один процес. Усі процеси виконують ту ж кількість роботи. Схеми відновлення, що гарантують оптимальне поширення навантаження в найгіршому випадку, коли x комп'ютерів вимкнулися є так звано оптимальні схеми відновлення для значення n і x. Вкладення в цій статті, показують, що задача виявлення оптимальних схем відновлення системи з n комп'ютерами відповідає математичній задачі виявлення щонайдовшої послідовності додатніх цілих чисел таких, що сума иенша, ніж n і суми Кинник алгоритму, який знаходить щонайдовшу послідовність з цими властивостями, не відомий. Ми заздалегідь отримали схеми відновлення, які оптимальні, коли більша кількість з комп'ютерів вимикаються, але вони не покривають навантаження, що балансує, коли із запахом відбувається [6]. З послідовностями модуля ми мінімізуємо максимальний навантаження також у випадку «обгортки по колу». Послідовності модуля дають оптимальнішу поведінку більшого ряду пошкодженого комп'ютери, ніж Голомбо і ощадливі послідовності. Наприклад, в цьому випадку 92−107 комп'ютери в кластері, послідовності модульного-м гарантують оптимальну поведінку в цьому випадку Мал 4 Представлення різниці між системою OGRs та ощадливою версією систем відновлення 12 вимкнень, поки лінійка Голомбо тільки гарантує оптимальність для 11 вимкнень, і ощадлива схема для 10 вимкнень. Перевага з ощадливим алгоритмом, порівнянним з іншими схемами, є, що ми можемо легко вичислити послідовність з чіткими частковими сумами також для великого n, де немає послідовності Голомбо а послідовності модуля відомі. Лінійка Голомбо відома довжинами до 41912 (з 211 маркою) [11,12,13]. З них перший 373 (з 23 позначками), відомо, є оптимальний, поки лінійка модуля відомі тільки 13 позначками. Послідовності модуля є відома тільки до 92 комп'ютерів в кластері. Наші схеми відновлення можуть бути негайно використані в комерційних кластерних системах, наприклад визначаючи список в Сонячному Кластері, користуючись scconf командою. Результати можуть також будьте використані, коли ряд зовнішніх систем, наприклад telecommunication центри, що переключають відправте дані різним вузлам в розподіленій системі (або кластері, де вузли мають individual мережеві адреси). У такому разі, списки відновлень також здійснюються як альтернативні місця призначення в зовнішніх системах або в протоколі комунікації рівень, наприклад переворот [IP 8]. Список літератури 1. Golomb, S. W., and Taylor, H., Cyclic Projective Planes, Perfect Circular Rulers, and Good Spanning Rulers, Sequences And Their Applications – SETA’01, Proceedings of Seta01, Bergen, Norway, May 2001, pp. 166−180 2. Hewlett−Packard Company, TruCluster Server − Cluster Highly Available Applications, Hewlett−Packard Company, September 2002 3. Hewlett−Packard, Managing MC / ServiceGuard, Hewlett−Packard, March 2002 4. IBM, HACMP, Concepts and Facilities Guide, IBM, July 2002 5. Klonowska, K., Lundberg, L. and Lennerstad, H., Using Golomb Rulers for Optimal Recovery Schemes in Fault Tolerant Distributed Computing, in Proceedings of the 17th International Parallel & Distributed Processing Symposium IPDPS 2003, Nice, France, April 2003, pp. 213 6. Lundberg, L., and Svahnberg, C., Optimal Recovery Schemes for High−Availability Cluster and Distributed Computing, Journal of Parallel and Distributed Computing 61(11), 2001, pp. 1680−1691 7. Microsoft Corporation, Server Clusters: Architecture Overview for Windows Server 2003, Microsoft Corporation, March 2003 8. G.F. Pfister, In Search of Clusters, Prentice−Hall, 1998 9. Sun Microsystems, Sun Cluster 3.0 Data Services Installation and Configuration Guide, Sun Microsystems, 2000 10. TruCluster, Systems Administration Guide, Digital Equipment Corporation, http:// www.unix.digital.com/faqs/publications/cluster_doc 11. http://www.cuug.ab.ca:8001/~millerl/g3−records.html 12. http://www.distributed.net/ogr/index.html 13. http://www.research.ibm.com/people/s/shearer/grtab.html
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-06-22; просмотров: 285; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.200.223 (0.008 с.) |

 різниці (dj − di) mod n чіткі, для i < j, і що усі (dj − di) mod n не нульові. Відколи є
різниці (dj − di) mod n чіткі, для i < j, і що усі (dj − di) mod n не нульові. Відколи є