
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Індустріальні джерела завад.Содержание книги
Поиск на нашем сайте
Джерелами індустріальних завад можуть бути електростанції, які експлуатуються на підприємствах та в житлових будинках, електричний транспорт, автомобіль, промислові, наукові, медичні і побутові ВЧ-пристрої Для електричних пристроїв побутового, комунального і медичного призначення, які експлуатуються в житлових будинках встановлені допустимі величини радіозвязку в діапазоні частот 150 кГц – 300 МГц. При цьому ………………. радіозавад не повинна перевищувати зазначених на графіку(рис.1):
Рис.1 Крива 1- допустимі рівні радіозавад для всіх типів електричних пристроїв, крім електро-інструментів, пересувних пристроїв. Крива 2- допустимі рівні радіозавад для ручного електро-інструмента, пересувних медичних пристроїв і ліфтів. В діапазоні від 150 кГц до 300 МГц електричні пристрої, які підключені до електричної мережі загального призначення та електричні пристрої з автономним живленням можуть створювати радіозавади напруженість яких не повинна перевищувати значень, які вказані на графіку(рис.2):
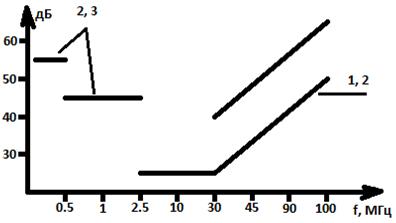
Рис.2 Крива 1 – радіозавади, які створюються пристроями увімкненими у 3-фазну мережу. Крива 2 – радіозавади від пристроїв увімкнених відносно…………………………….. Крива 3 – радіозавади від пристроїв з автономним живленням. Допустима напруженість поля, які створюються міським та залізничним електротранспортом також лімітується, відповідними значеннями в діапазоні частот від 150 кГц до 300 МГц(рис.3):
Рис.3 Напруженість поля радіозавад від двигунів внутрішнього згорання, мотоциклів, мопедів, газонокосарок, бензопил, електростанцій не повинно перевищувати 42 дБ в зазначеному діапазоні частот. Напруженість радіозавад від світильників з люмінесцентними не повинна перевищувати 60 дБ в діапазоні частот від 150 кГц – 500 кГц і 52 дБ в діапазоні від 500 кГц – 300 МГц.
№ 46 Побічне випромінювання.Електромагнітне екранування Побiчне випромiнюва ння - випромiнювання на частотi або частотах, розташованих за межами необхiдної ширини смуги, рiвень якого може бути знижений без шкоди для вiдповiдної передачi повiдомлень. До побiчних випромiнювань належать гармонiйнi випромiнювання, паразитнi випромiнювання, продукти iнтермодуляцiї i частотного перетворення, але до них не належать позасмуговi випромiнювання.
ЕМ-екранами називають конструкції призначені для послаблення електромагнітних полів, що створюються будь якими джерелами в деякій області простору.В більшості випадків ЕМ-екрани виготовляють з міді,сталі,алюмінію.Під дією первинного поля на поверхні екрану індукують ся завади, а в його товщині створюються струми і магнітна поляризація створюют вторинне поле. При складанні вторинного поля з первинним створюється результуюче поле, яке набагато менше первинного поля в захищеній області простору. Таким чином уважають, що ЕМ - екран відбиває і перенаправляє потік електромагнітної енергії і відводить його від захищеної області. Ем- екран являє собою лінійну систему для якої справджується принцип взаємності переміщення. Це означає, що ефективність екрана зберігається незалежно від того де знаходиться джерело випромінювання,тобто всередині або за межами екрану. Кількісну оцінку ефективності ЕМ-екрану можна охарактеризувати відношенням напруженості поля в захищеній області простору при відсутності екрану та при його наявності. Розрізняють ефективність екранування по електричній та магнітній складовій, які визначаються по формулам:
де Е- при наявності екрану і
Для практичних розрахунків ефективність екранування часто визначають у дБ. Ефективність екрану суттєво залежить від характеру джерела поля.Будь яким джерелом ЕМ-поля можна представити сокупність електричних та магнітних диполів, тому поведінка екрану по відношенню до різних реальних джерел випромінювання розглядаеться у співвідношенні до електричного і магнітного диполів. Також на ефективність екранування впливає середовище в якому розповсюджуються ЕМ-хвилі. У загальному випадку екран не тільки послаблює поле, але й спотворює його структуру в області захисту, тому ефективність екранування буде різною для електричних і магнітних складових. Це суттєво ускладнює кількісну оцінку ефективності екранування. Тільки в найпростіших випадках ефективність екрану визначається однозначно, до таких випадків належить екранування простору від плоскої ЕМ-хвилі нескінченним однорідним екраном.У цьому випадку використовують спрощену формулу:
де d- товщина екрану, х- координата точки спостереження по відношенню до безкінечного простору,
№47 Структура та принцип роботи АСКД Структура АСКД Рис. 1
високошвидкісна Внутрішня шина шина
Пост № n
 Наявність несправного елемента в ДП при установці в готовий вибір може привести до виходу з ладу елементів, розташованих на інших ДП, це є розповсюдження дефекту. На кожному наступному етапі процесу виявити несправність коштує в 10 раз дорожче. Наявність несправного елемента в ДП при установці в готовий вибір може привести до виходу з ладу елементів, розташованих на інших ДП, це є розповсюдження дефекту. На кожному наступному етапі процесу виявити несправність коштує в 10 раз дорожче.
При сучасному виробництві контроль та діагностування дефектів ДВ виконують автоматизовані системи контролю та діагностування (АСКД). Системи для схемного та функціонального контролю вимагають різних способів програмування. Функціональний тестер – виявляє дефектний ДВ. схемні АСКД випробовують компоненти паралельно і виявляють всі дефекти за один прохід. Недоліки схемних систем: 1) неможливість виявити помилки, які виникають при розробці ДВ; 2) робота в режимах, відмінних від номінальних режимів функціонування ДВ; 3) неможливість виявлення помилок логічної синхронізації. Недоліки функціональних систем; 1) висока вартість та часові затрати підготовки робочих програм; 2) тривалий час для виявлення та діагностування дефектів. Сучасні програми об’єднують функціональні та схемні методи перевірки в єдині АСКД. Коло задач мікропроцесорних пристроїв (МП) в АСКД; 1) керування програмованими джерелами тестуючих впливів; 2) керування комутаторами; 3) керування процесом врівноваженням вимірювальних кіл і підвищення їх швидкодії; 4) формування тестових впливів та підвищення точності вимірювальних перетворювачів; 5) обробка результатів при сукупних вимірюваннях; 6) формування в цифровому вигляді номінальних значень та допусків і порівняння їх з результатами вимірювань; 7) логічна обробка інформації при діагностуванні дефектів; 8) керування обміном та виводом інформації; 9) визначення статистичних характеристик. Структура АСКД (див. Рис 1) мультишинна, перевагами якої є можливість автономної роботи кожного поста. Центральна ЕОМ виконує інші функції і ефективність всієї системи зростає.
Випробування великих інтегральних схем (В і С) привело до розвитку засобів «канальної електроніки». Кожен вивід, зв’язаний з об’єктом контролю, керується, тестується та аналізується автономно. Така архітектура можлива тільки на основі застосування для кожного каналу спеціалізованих В і С, які реалізують функції керування, генерації, прийому та обробки результатів тестування (частота тестуючих імпульсів ~ 5 МГц). №48 Структурна схема та принцип роботи АВТ(апаратура високошвидкісного тестування)
Стандартна діагностична апаратура забезпечує внутрісхемну перевірку і функціональне тестування, що виявляють 90—95 % усіх дефектів. Інші 5 % дефектів можна визначити лише з використанням апаратури високошвидкісного тестування (АВТ), що забезпечує всі основні види тестування ДВ, що містять ВІС. Крім того, вона дозволяє на великій швидкості (з частотою тестуючих сигналів 2 МГц) перевіряти такі параметри, як затримки, фронти сигналів, виявляти дефекти, викликані взаємним впливом мікросхем.
Розглянемо основні принципи організації і структуру АВТ. Вона включає 4 основних вузли (мал. 1): плату інтерфейсу системного процесора; плату програмного керування; плату канального процесора; плату високошвидкісної оперативної пам'яті, що складає з 5 секцій по 1024 біт. Апаратура виконана в модульному виконанні, що забезпечує можливість її автономного використання в інших системах. Інтерфейс процесора високошвидкісного тестування забезпечує прямий зв'язок між центральним процесором і АВТ. Ця плата не тільки виконує звичайні функції передачі даних, але і забезпечує керування прямим доступом у пам'яті АВТ. Можливість керувати прямим доступом до пам'яті дозволяє передавати дані безпосередньо як у центральний і канальний процесори, так і в оперативну пам'ять АВТ. Швидкодіюча оперативна пам'ять забезпечує характеристики, необхідні при записі і витягу тестових впливів, записи і витяги результатів тестування в реальному масштабі часу. Плата інтерфейсу містить наступні основні елементи: лічильник адреси; лічильник слів даних; буфер шини даних; пристрій керування прямим доступом до пам'яті; пристрій контролю і керування станом системи. Плата високошвидкісного програмного керування виконує різні функції. Головні з них: установка режимів тестування; передача даних на канальний процесор і канальну пам'ять; комутування даних канального процесора і пам'яті; забезпечення самоконтролю каналів швидкого тестування; забезпечення прийому і передачі з елементів, що мають різні рівні логічних сигналів. Плата високошвидкісного програмного керування забезпечує ефективний обмін між центральним і канальним процесорами за рахунок прямого доступу до пам'яті і 16-розрядної структури шин даних. Ця комбінація забезпечує швидку зміну і зчитування даних з оперативної пам'яті. Можливість комплексної самоперевірки завжди важлива для АСКД як перед початком роботи, так і в процесі її експлуатації. Звичайно через недостачу часу в системах проводиться лише часткова перевірка. Унаслідок високої швидкості роботи АВТ забезпечує повну перевірку устаткування за час, що раніш витрачалося на часткову перевірку. Основні функції комплексної самоперевірки включені в плату високошвидкісного програмного керування і забезпечують можливість швидкої і надійної перевірки технічного стану апаратурних засобів. Плата програмного керування включає наступні елементи: регістри стану і керування; генератор логічних рівнів; буфер шин даних; тригер адреси; буфер адреси; лічильник адреси; селектор функцій керування; буфер шини керування; тригер функціонального керування; пристрою самоперевірки.
Плата канального процесора забезпечує можливість використання мікропроцесора для керування високошвидкісною пам'яттю. У пристрої використовується схема включення процесора, що забезпечує широкі можливості прийому і передачі даних при керуванні пам'яттю. Канальний процесор організує також стиск даних при їхньому записі в пам'ять, що при обмеженому обсязі пам'яті дозволяє одержати інформацію для досить детального тестування БІС. Стиск даних здійснюється завдяки використанню оперативної пам'яті з можливістю побітової зміни даних (CBRO — Chang Bit RAM Operation). Канальний процесор забезпечує можливості умовного і безумовного діагностування завдяки використанню підпрограм і системи переривань із глибиною, рівною 5; використанню циклів; використанню умовного і безумовного звертання до чи підпрограм групам різних даних. Процесор передбачає індикацію даних. На додаток до широких можливостей керування комутацією канальний процесор забезпечує також програмувальні високошвидкісні сигнали часової синхронізації, необхідні для керування тестуванням і виміром відповідних сигналів у реальному масштабі часу. Одночасно тут же генеруються додаткові сигнали, необхідні при налагодженні програми. Ці сигнали можуть бути запрограмовані з пульта керування. Програмувальні строби тестування і виміри формуються процесором від генератора 20 мГц із кварцовою стабілізацією частоти. Частота надходження тестуючих стробів програмується в чотирьох діапазонах від 1 кГц до 2 Мгц, з роздільною здатністю 50 нс. Строб виміру програмується з роздільною здатністю 50 нс у діапазоні, що відповідає надходженню тестуючих стробів. Цей строб може виникнути не раніше, ніж за 200 нс після появи тестуючого строба і закінчується не пізніше, ніж за 50 нс до появи наступного тестуючого строба. Плата канального процесора включає наступні елементи: тригер стану; тригер керування; канальна пам'ять; генератор адреси; тригер адреси; комутатор шини адреси; прийомний регістр шини адреси; буфер шини керування; програмувальний генератор тимчасових інтервалів; кварцовий стабілізатор і дешифратор; комутатор керування виходом сигналів часу; реле часу захисту; буфер шини даних. Захисне реле часу служить для запобігання випробуваної плати від перевантажень при комутації апаратури. Воно дозволяє доступ сигналів на контрольовану плату лише через 200 мс після завершення комутації. Високошвидкісні канали, керовані пам'яттю, забезпечують безпосередній інтерфейс між діагностуємим ДВ й АВТ. Через них одночасно подаються тестуючі сигнали і проводяться виміри сигналів у частотному діапазоні до 2 Мгц.
№49 побудова та дослідження експерементально-статистичних моделей РЕА. Хі – реалізація випадкової велечини Х і наз. Результати спостережень, і = t, z, …,n, n – загальна кількість дослідів.
Варіаційний ряд – результати спостережень мають певний порядок, наприклад, в порядку зростання, групуються по інтервалам і т.д. n < 100. Статистичний ряд – (n < 100) будується наступним чином: 1. фіксується найбільше X max та найменше X min значення реалізації Хі випадкової величини Х. 2. Діапазон зміни Х тобто X max – X min, ділиться на L інтервалів 3. Розраховуються частоти попадання Хі в j–й інтервал: 4. Будується ряд: Інтервал Гістограма – графічне зображення статистичного ряду: 1. На осі абсумс діапазон змінних Х ділмться на інтервали групування 2. На кореному інтервалі будується прямокутник з площею f *
f *
X min = X1 X j X j + 1 X max = Xℓ +1
Якщо число інтервалів дуже велике, то в гістограмі виявляються незакономірні, випадкові коливання; якщо число інтервалів надто мале, то властивості розподілу описуються грубо. На практиці діє правило: (X max – X min) ділять на ℓ ≥ 7 так, щоб в кожний інтервал попало не лише 3-4 результатів скорочень Х. 1. Статистияна фі-я розподілу випадкової величини – залежність статистичної частоти події від біжучого значення цієї величини Х: Побудова F* по варіаційному ряду:
Х < X1 Xi < X < Xi+1, i = 1, 2, …, n 1, X ≥ X n полігон накоплених частот.
Побудова F* (X) по статистичному ряду:
1. Над кожним відрізком інтервалу проводимо горизонтальну лінію. На рівні ординати, тобто значення накопленої частоти з (22) 2. Кінці горизонтальних відрізків з’єднують з віссю абсис і кінці відрізків з’єднуємо між собою ламаною лінією або плавною кривою.
F*

Рис. 17 Полігон накоплених 1 частот. Після того, як для параметра конструкції
F*
Х
X min = X1 X; (
Після того як для параметра конструкції РЕЗ або технологічного процесу одержано статистичний розподіл потрібно вибрати вид статистичного розподілу та визначити числові значення параметрів цього розподілу. Статистичні значення:
№50 Структура системи контролю РЕА Елементи системи контролю: 1) об’єкт контролю (джерело інформації) – контрольована РЕА; 2) Контрольно-вимірювальна апаратура (КВА) отримання, переробки та аналізу вимірювальної інформації – оператор КВА та інформаційний центр збору та обробки експлуатаційної інформації. 3) Засоби передачі вимірювальної та керуючої інформації (З П І) – кабелі та комутуючі пристрої; 4) Споживач інформації – оператор КВА та інформаційний центр збору та обробки експлуатаційної інформації.
Jo вх

 GPEA JoCT GPEA JoCT
 Jo K Jo K   Joвих Joвих

Рис. 12 Структура локальної інформаційної системи контролю(ЛІСК). Зовнішні потоки інформації в ЛІСК: 1) потік вхідної інформації Jo вих (t) з РЕА в КВА в процесі контролю; 2) потік вихідної інформації Jo вих (t), який забезпечує оператору необхідну інформацію для прийняття рішення про стан РЕА; 3) потік вихідної інформації з КВА в РЕА – стимулюючі сигнали Jo ст. 4) Потік вихідної інформації Jo к. – корекція окремих параметрів РЕА. 5) Потоки вихідної інформації Jo оu1 – керування роботою КВА, Jou2 керування роботою РЕА, Jou3 – прийняття рішення про стан РЕА оператором.
причому
GPEA – алгоритм, у відповідності до якого циркулюють внутрішні потоки інформації в РЕА. GЛІСК = { GPEA U GКВА U GЗПІ U Gоп } – загальний послідовний алгоритм для ЛІСК. GPEA – визначальний алгоритм (всі інші є підпорядкованими). Для виявлення стану РЕА у відповідності до алгоритму треба розв’язати множину М задач контролю: М = {m1,… mi,… ml}, де mi - часткові задачі контролю. З метою спрощення апаратури контролю доцільно вибирати мінімальну множину R режимів її роботи: R = {r1,... rj,... rk}, де rj – частковий режиму роботи КВА. R < M та l > k. ЛІСК – це система обслуговування контрольованої РЕА з чеканням, тобто якість обслуговування залежить від пропускної здатності системи по контролю.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-06-22; просмотров: 400; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.133.106.114 (0.017 с.) |





 - напруженість електричного поля при відсутності екрану,
- напруженість електричного поля при відсутності екрану, - напруженість магнітного поля при відсутності екрану, Н- при наявності.
- напруженість магнітного поля при відсутності екрану, Н- при наявності.
 - питома провідність матеріалу екрану,
- питома провідність матеріалу екрану, - еквівалентна глибина проникнення.
- еквівалентна глибина проникнення.



 де і = 1, 2,... L – номер інтервалу, Хі , Хі +1 – початок і кінець і-го інтервалу, X min = X1, X max = Xℓ+1
де і = 1, 2,... L – номер інтервалу, Хі , Хі +1 – початок і кінець і-го інтервалу, X min = X1, X max = Xℓ+1  , де n – число значень Хі, потрапили в і – й інтервал.
, де n – число значень Хі, потрапили в і – й інтервал. частоти
частоти  одні і тіж вихідні дані можна згрупувати в різні статистичні ряди.
одні і тіж вихідні дані можна згрупувати в різні статистичні ряди. ;
; , тобто
, тобто  . При збільшені кількості реалізацій
. При збільшені кількості реалізацій  Рj* Рис. 9 Гістограма та полігон
Рj* Рис. 9 Гістограма та полігон







 j
j


 X
X




 ) Xj+1 X max = Xℓ+1
) Xj+1 X max = Xℓ+1 - математичне сподівання. (23).
- математичне сподівання. (23). - середнє квадратичне відхилення. (24)
- середнє квадратичне відхилення. (24)
 - початковий момент S-го порядку.
- початковий момент S-го порядку. - центральний момент S – го порядку.
- центральний момент S – го порядку.
 РЕА УА – універсальна автоматична.
РЕА УА – універсальна автоматична.

 Jo BX
Jo BX 




 Jou2 Jou3
Jou2 Jou3 ,
, ,
, 



