
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Підсилювачі постійного струму з перетворенням сигналу.Содержание книги
Поиск на нашем сайте
Розглянута вище схема диференційного підсилювача забезпечує дрейф нуля на рівні десятків-сотень мікровольт на градус Цельсія. В ряді випадків вказана величина дрейфу є неприпустимо великою. Так, наприклад, у схемах прецизійного регулювання температури, у високоточних цифрових вимірювальних приладах виникає потреба забезпечити дрейф нуля на рівні десятих і навіть сотих долей мкВ. Підсилювачі постійного струму з такою величиною дрейфу можуть бути реалізовані лише за схемою модулятор–демодулятор (МДМ). На структурному рівні схема матиме вигляд:
Рис. 95
Вхідний постійний або повільнозмінний сигнал U1 (рис. 96) за допомогою модулятора (М) перетворюється на сигнал меандрової форми U2. У принципі модуляція може бути синусоїдної форми, проте схемотехнічно простіше реалізувати модуляцію меандрової форми. Вхідний сигнал характеризується певною амплітудою та миттєвим значенням полярності сигналу (фазою коливань). Амплітуда модульованих коливань буде відповідати амплітуді вхідного сигналу, а фаза коливань буде містити інформацію про миттєве значення полярності вхідного сигналу.
Рис. 96
Модульовані коливання підсилюються “бездрейфовим” підсилювачем перемінного струму U3. Після підсилення сигнали в блоці ДМ демодулюються, формуючи тим самим U4. Частота модулюючих коливань повинна бути, принаймні, на порядок вищою від частоти підсилюваного сигналу. В противному разі форми вхідного та вихідного сигналів можуть не збігатися. Схема найбільш простого модулятора (рис. 97) містить механічний контакт, який перемикається з частотою сигналу опорного генератора.
Рис. 97
Дана схема має той недолік, що містить механічний контакт, проте наявність трансформатора дозволяє (шляхом добору коефіцієнта трансформації) отримувати напругу, більшу від вхідної. Оскільки вхідний сигнал, як правило, має малу величину, то необхідно ефективно екранувати весь блок модулятора від зовнішніх електричних та магнітних полів. У сучасних МДМ підсилювачах використовується принцип заряду-розряду конденсатора. Ключами служать польові транзистори. Принцип роботи модуляторів такого типу проілюстровано за допомогою схем, наведених на рис. 98.
Коли ключ S (рис. 98, а) знаходиться в положенні І, то відбувається заряд конденсатора. Протікання зарядного струму конденсатора І1 через резистор R зумовить виникнення на ньому спаду напруги додатної полярності відносно спільного провідника. Перехід ключа в положення ІІ зумовить розряд конденсатора. Внаслідок протікання розрядного струму ІІІ через резистор R виникне напруга, але вже протилежної полярності.
Якщо полярність вхідного сигналу зміниться на протилежну, то фаза коливань на резисторі R відносно фази положення ключа зміниться на протилежну. Таким чином, фаза модульованих коливань, при незмінній фазі коливань опорного генератора, залежить від миттєвого значення полярності вхідного сигналу. У реальному МДМ-підсилювачі (рис. 98, б) принцип заряду-розряду залишається в силі, але самі ключі на польових транзисторах частіше ввімкнені за мостовою схемою, що збільшує ефективність модулятора. Для демодуляції підсиленого бездрейфовим підсилювачем сигналу можна було б використати звичайний випрямляч. Проте в цьому випадку втрачаємо інформацію про полярність вхідного сигналу, оскільки полярність напруги на виході буде незмінною і визначатиметься полярністю ввімкнення діода. Для відтворення інформації про полярність вхідного сигналу необхідно використовувати демодулятори, чутливі до фази модульованих коливань, тобто використати схему синхронного детектора. Принцип роботи такого пристрою можна пояснити схемою, зображеною на рис. 99, а:
Рис. 99
Низькому рівню опору ключа RS (рис. 99, б) відповідає замкнений стан. Отже, в інтервалі 0 – t1 конденсатор СФ швидко заряджається до амплітудного значення вхідної напруги. В інтервалі t1– t2 полярність вхідного сигналу змінюється на протилежну, а ключ переходить у розімкнений стан (високий рівень RS). Отже, полярність напруги на RН залишиться незмінною, спостерігатиметься лише зменшення амплітуди
Рис. 100
Відмінний від нульового зсув фази виникає в МДМ- підсилювачі внаслідок затримки сигналу на час t3 при проходженні його через підсилювач. Компенсація виникаючого при цьому зсуву фази досягається введенням блока зсуву фази Dj коливань опорного генератора (рис. 101).
Рис. 101
Схема синхронного детектора на операційному підсилювачі (ОП) приведена на рис. 102. Шляхом добору номіналів резисторів даної схеми вдається реалізувати ситуацію, коли зміна положення ключа S переводить дану схему з інвертуючого режиму підсилення до неінвертуючого і навпаки. При замкненому ключі схема буде інвертуючою, при розімкненому – неінвертуючою. Характерною особливістю даної схеми є те, що модуль коефіцієнта передачі за напругою схеми зберігається незмінним при зміні режиму підсилення.
Рис. 102 Наведена схема, в залежності від виду вхідного сигналу, може виконувати функцію модулятора або синхронного детектора. На рис. 103 зображені осцилограми основних сигналів при використанні схеми як модулятора (випадок а) або синхронного детектора (випадок б).
Рис. 103
|
||||||
|
|
Последнее изменение этой страницы: 2016-06-22; просмотров: 550; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.216.161.178 (0.012 с.) |

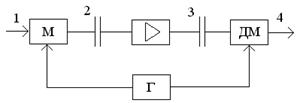


 Рис. 98
Рис. 98
 з постійною часу t = RН×СФ. В інтервалах часу t2 – t3 та t3 – t4 процеси повторюються. Неважко бачити, що зміна фази стану S чи фази вхідного сигналу на протилежну приведе до зміни полярності вихідного сигналу. Якщо ж різниця фаз
з постійною часу t = RН×СФ. В інтервалах часу t2 – t3 та t3 – t4 процеси повторюються. Неважко бачити, що зміна фази стану S чи фази вхідного сигналу на протилежну приведе до зміни полярності вихідного сигналу. Якщо ж різниця фаз  відмінна від n×p (де n – натуральний ряд чисел), то на виході синхронного детектора ми отримаємо середнє значення напруги, значно менше від амплітудного значення вхідного сигналу. На рис. 100 наведені осцилограми напруги
відмінна від n×p (де n – натуральний ряд чисел), то на виході синхронного детектора ми отримаємо середнє значення напруги, значно менше від амплітудного значення вхідного сигналу. На рис. 100 наведені осцилограми напруги  при
при  і Сф = 0.
і Сф = 0.






