Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Измерение ускорения свободного падения с помощью машины атвудаСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Цель работы – изучение динамики поступательного движения связанной системы тел с учетом сил трения. Приборы и принадлежности: машина Атвуда, смонтированная на лабораторном модуле ЛКМ–3, набор грузов и перегрузов, нить с крючками длиной 60 см (зеленая), измерительная система ИСМ–1 (секундомер). Введение
Рассмотрим движение механической системы, состоящей из вращающегося легкого блока, через который перекинута нить с привязанными грузами массами m 1и т 2(т 1 < т 2) (рис. 1).
Если нить нерастяжимая, то ускорения грузов
(3)
Разность сил натяжения (T 2 – Т 1 ) зависит от меры инертности блока (момента инерции) и трения в подшипниках блока. В предельном случае отсутствия сил трения и нулевой массы блока и нити Т 2 = Т 1 , Поэтому а ускорение свободного падения
Учтем влияние сил трения в подшипниках оси блока (пренебрегая массой блока). Введем в уравнение (3) вместо разности Т 2– Т 1«эффективную» силу сопротивления F.
При сухом трении в подшипниках и незначительном изменении массы грузов m 1и m 2 в первом приближении можно считать, что отношение
Кинематическая связь ускорения а грузов с угловым ускорением β блока при отсутствии проскальзывания нити а = β R, (7) где R – радиус блока. При равноускоренном движении угол поворота блока φ при начальной угловой скорости ωо = 0
j. (8)
Из формул (7) и (8) следует
Описание установки
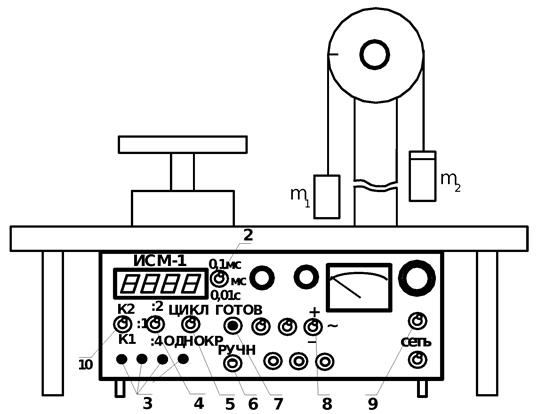
Машина Атвуда представляет собой блок, закрепленный на стойке 1, через который перекинута нить. К концам нити подвешены грузы m 1и т 2(рис.2). Вращение блока регистрируется фотодатчиком, который фиксирует поворот блока на один и более оборотов.
Рмс. 2. Машина Атвуда на модуле ЛКМ-3
Задание I. Измерение ускорения свободного падения
1. Подключите датчик угла поворота блока к разъему № 2 на задней стенке модуля ИСМ – 1. Переключатель 10 переведите в положение К2. Переключатель 4 – в положение «:1», переключатель 5 - в положение «однокр», переключатель 8 - в положение «+» или «–», переключатель 9 – в среднее положение. Включите переключателем «сеть» питание модуля. Перекиньте нить через большой блок, радиус которого R = 25 мм, и закрепите на концах нити грузы примерно одинаковой массы m 1и т 2(m 1≈ т 2≈100 г, точное значение массы грузов выгравировано на каждом грузе), убедитесь, что грузы в свободном состоянии находятся в равновесии. Массу т 2 увеличьте на 10 г с помощью перегрузка. Значение массы грузов m 1и т 2с точностью до десятых долей грамма занесите в таблицу. Переведите груз m 1в нижнее положение и остановите качание второго груза. Вращая блок, добейтесь срабатывания датчика угла поворота, о чем свидетельствует загорание индикатора 3, при этом прорезь на блоке будет находиться вблизи нулевой отметки шкалы блока. Нажмите кнопку 7 «готов» и отпустите груз m 1. Система грузов придет в движение и таймер модуля ИСМ–1 зафиксирует время одного оборота блока в секундах или в миллисекундах в зависимости от положения переключателя 2. Результат измерения занесите в таблицу.
Таблица
2. Рассчитайте ускорение грузов по формуле (9). 3. Рассчитайте ускорение свободного падения g по формуле (5). 4. Повторите измерения и расчеты по пп.2–4 не менее 5 раз и рассчитайте среднее ускорение грузов а и среднее ускорение свободного падения g. 5.Замените перегрузок 10 г на другой, массой 20 г. Повторите измерения по пунктам 2-5. 6. Проведите те же опыты по п. 2 – 6 с перегрузками в 10 г и 20 г, изменив массу наборных грузов вдвое (m 1≈ т 2≈ 200 г). 7. Найдите среднее значение ускорения свободного падения g по всем измерениям. 8. Оцените абсолютную и относительную погрешность нахождения ускорения свободного падения g по методу Стьюдента. Результат запишите в стандартном виде: g = (< g > ± Δ g) (м/с2), ε =... % при а = 0,95. Задание II. Определение ускорения свободного падения с учетом трения в подшипниках оси блока Разность масс грузов в нашем эксперименте составляет всего 2 – 10 % от их суммарной массы (при большей разности масс движение грузов становится слишком быстрым, что приводит к выходу из строя установки). При этом на результаты эксперимента заметно влияет трение в подшипниках оси блока. Введя в уравнение движения грузов некоторую «эффективную» силу сопротивления F, получим уравнение движения грузов с учетом силы трения в подшипниках оси блока a (m 1 + m 2) = (m 2 – m 1) g - F, (10)
Отношение Построив график зависимости ускорения а от величины k и убедившись в том, что эта зависимость линейная, найдите g как угловой коэффициент графика. Ускорение свободного падения можно найти так же как
где Δ a – разность между ускорениями системы при разных массах, а разность Δ k = k2 – k1 вычисляется для соответствующих значений масс. Сравните результаты, полученные в первом и втором заданиях. Отношение Контрольные вопросы 1. Дайте определение кинематическим характеристикам материальной точки, движущейся прямолинейно: траектории, перемещению, пути, скорости, ускорению. 2. Дайте определение кинематическим характеристикам материальной точки, движущейся по окружности: углу поворота, угловой скорости, угловому ускорению. Какова связь между линейными и угловыми кинематическими характеристиками? 3. Что изучает динамика поступательного движения? Как вводится понятие силы, действующей на частицу, и массы частицы в динамике? Записать уравнение движения материальной частицы. 4. Как изменяется закон сухого трения в зависимости от внешнего воздействия на тело, находящегося на поверхности другого тела? От каких факторов зависит коэффициент трения? Другие виды трения. Анализ движения тела по наклонной плоскости при разных углах наклона. 5. Выведите основную рабочую формулу (5). Задания для отчета по лабораторной работе
1. Ускорение свободного падения у поверхности Луны в 6 раз меньше ускорения свободного падения у поверхности Земли. Во сколько раз выше может прыгнуть человек на Луне, чем на Земле? 2. Радиус Луны R л примерно в 3,7 раза меньше радиуса Земли R з,,,а масса Луны m л в 81 раз меньше массы Земли m з . Найти ускорение свободного падения g л у поверхности Луны. 3. На какой высоте над полюсом Земли ускорение свободного падения на убывает в 2 раза? 4. Радиус Солнца R с примерно в 110 раз больше радиуса Земли R з, а средняя плотность Солнца относится к средней плотности Земли как 1:4. Найти ускорение свободного падения у поверхности Солнца. 5. Радиус R малой планеты равен 250 км, средняя плотность 3 г/см3. Определить ускорение свободного падения g на поверхности планеты. 6. Через неподвижный блок перекинута нить, к концам которой привязаны грузы массами m 1= 2 кг и m 2 = 3 кг (см. рис.1). Найти ускорение грузов. Массой блока пренебречь, нить считать невесомой и нерастяжимой. 7. Через блок перекинута нить, на концах которой висят два груза с одинаковыми массами М. Одновременно, на каждый из грузов кладут по перегрузку: справа – массой 3 m, слева – m (рис 3.). Определить ускорение системы. 8. Через неподвижный блок перекинута нить, к которой подвешены три одинаковых груза массой m = 5 кг каждый (рис.4). Найти ускорение системы и силу натяжения нити между грузами 1 и 2.
Рис. 3 (к задаче 7) Рис. 4 (к задаче 8)
9. На углу гладкого стола укреплен неподвижный блок (рис. 5), через него перекинута нить, к концам которой привязаны грузы. Масса груза, лежащего на столе m 1 = 5 кг, масса второго груза m 2 = 2 кг. С каким ускорением движутся грузы? 10. Два груза массами m 1 и m 2 соединены легкой нерастяжимой нитью (см. рис. 5). Коэффициент трения между грузом и столом μ. Определить условие, при котором грузы будут двигаться. 11. На наклонной плоскости с углом α лежит брусок массой m 1. Груз массой m 2 присоединен к бруску при помощи нити, перекинутой через блок (рис. 6). Определить ускорение тел и силу натяжения нити.
Рис. 5 (к задаче 10) Рис. 6 (к задаче 11)
12. Три груза m, m и 4m, где m = 5 кг, соединены невесомыми нерастяжимыми нитями (рис. 7). Коэффициент трения между грузами и горизонтальной поверхностью µ = 0,3. Определить силы натяжения нитей.
Рис. 7 (к задаче 12) Рис. 8 (к задаче 13)
14. Колесо радиусом R = 10 см вращается с угловым ускорением 3,14 рад/с. Найти для точек обода к концу первой секунды угловую скорость. 15. Вал вращается с частотой 180 об/мин. С некоторого момента вал начал вращаться равнозамедленно с угловым ускорением 3 рад/с2. Через какое время вал остановится?
16. Колесо, вращаясь равноускоренно, достигло угловой скорости 20 рад/с через 10 оборотов после начала вращения. Найти угловое ускорение колеса. 17. Вал вращается с частотой 180 об/мин. С некоторого момента вал начал вращаться равнозамедленно с угловым ускорением 3 рад/с2. Через какое время вал остановится? 18. Точка движется по окружности радиуса R = 20 см с постоянным тангенциальным ускорением 5 см/с2. Через какое время t после начала движения нормальное ускорение будет равно тангенциальному ускорению? 19. Колесо радиусом R = 10 см вращается так, что зависимость угла поворота радиуса колеса от времени дается уравнением 20. На наклонной плоскости с углом при основании α находится доска массой M и на ней брусок массой m (M > m) (рис. 9). Коэффициент трения между доской и плоскостью μ, между доской и бруском –2µ. Определить ускорение этих тел. При каком отношении масс тела будут находиться в равновесии?
α
Рис. 9 (к задаче 20) Лабораторная работа № 4 МАЯТНИК ОБЕРБЕКА Цель работы – изучение основного закона динамики вращательного движения, определение момента инерции системы грузов.
Приборы и принадлежности: лабораторный модуль ЛКМ-3 со стойкой и блоком, стержень с отверстиями, два круглых груза, груз наборный, нить длиной 55 см с крючком (синяя), измерительная система ИСМ-1 (секундомер), пластиковый фиксатор.
Краткая теория Основной закон динамики вращательного движения твердого тела относительно неподвижной оси
связывает кинематическую характеристику движения – угловое ускорение Угловое ускорение характеризует изменение угловой скорости во времени и направлено, как и момент силы, вдоль оси вращения. Рис. 1. Момент M силы F
Угловое ускорение связано с касательной составляющей линейного ускорения а τточки вращающегося тела соотношением
где r –- кратчайшее расстояние от этой точки до оси вращения. Моментом силы в общем случае называют векторную величину
где В уравнении (1) Момент инерции I характеризует распределение массы в твердом теле относительно оси вращения и является мерой инертности вращающегося тела. Момент инерции равен сумме произведений элементарных масс Δ mi, на которые мысленно разбито тело, на квадрат их расстояний до оси вращения I =ΣΔ mi ri . (5) Выражая Δ mi через плотность тела: Δ mi = ρ Δ Vi,где Δ Vi – элементарный объем тела, и переходя к пределу при Δ Vi → 0, получим
Формула (6) позволяет теоретически найти момент инерции любого тела. Например, момент инерции тонкого однородного стержня длиной l и массой т относительно оси, проходящей перпендикулярно стержню через его центр, I = т l 2 / 12. Теорема Штейнера устанавливает связь между моментом инерции Iс твердого тела относительно оси, проходящей через центр инерции, и моментом инерции относительно другой оси, параллельной первой I = Iс + та2 , (7) где а – расстояние между осями, т – масса тела. В настоящей работе экспериментально находится момент инерции маятника Обербека (рис.2). Он состоит из блока радиусом R, который может вращаться вокруг неподвижной горизонтальной оси. К блоку прикреплены симметрично относительнооси стержни, на каждом из которых могут свободно перемещаться грузы массами m 1, что дает возможность изменять момент инерции маятника. Грузы m 1 устанавливаются на одинаковом расстоянии от оси, так что центр инерции всей вращающейся части маятника находится на оси вращения.
.
Рис. 2. Маятник Обербека
К концу нити прикреплен груз массой m. Из закона динамики вращательного движения следует
Момент силы М, создающийся силой натяжения нити, исходя из (4)
где α – угол между вектором Запишем второй закон Ньютона для поступательного движения груза m в проекции на направление ускорения а,
В этой формуле сила натяжения нити T, действующая на груз, по модулю равна силе натяжения нити, действующей на блок в формуле (9) (поэтому они обозначены одинаково). Это справедливо, если массой нити можно пренебречь по сравнению с массой груза т. Из (9) и (10) получим
Тогда из (3) следует, (12)
Подставляя (11)и(12)в (8), получим Из этой формулы следует, что ускорение (а) не зависит от времени, так как все остальные величины в этом уравнении постоянны, значит, движение маятника будет равноускоренным и при нулевой начальной скорости.
где h – путь, пройденный грузом т за время t. В данной работе измеряется время одного полного оборота блока, и за это время груз массой m пройдет путь h =2π R. (15) Подставив (14) и (15) в (13), получим формулу для вычисления момента инерции маятника
(16)
Момент инерции маятника Обербека будет изменяться при изменении расстояния r от оси вращения маятника до центров грузов массами m 1, перемещаемых вдоль стержней. Согласно теореме Штейнера (7)
где Ic – момент инерции всей вращающейся части маятника при условии, что центры грузов m 1находились бы на оси вращения. Из (17) следует, что зависимость Описание установки
Маятник Обербека монтируется на блоке 11, закрепленном на стойке 10 модуля ЛКМ–3 (рис. 3). К блоку радиусом 25 мм прикрепляют нить, к концу которой подвешивают наборный груз массой т = 100 ÷ 200 г. На ось блока через среднее отверстие надевают стержень 12 и закрепляют его пластиковым фиксатором 13. Вращая стержень, накручивают на блок нить и поднимают груз так, чтобы он не касался стержня. При опускании груза нить приведет во вращательное движение стержень. После полного раскручивания нити стержень, продолжая вращательное движение, накрутит нить на блок и поднимет груз. При этом вращательное движение прекратится – система перейдет в начальное состояние. Время опускания и подъема груза (период колебаний маятника Обербека) зависит от многих параметров установки: длины нити, массы груза т, момента инерции стержня и блока, радиуса блока (от сил трения, толщины и массы нити, которыми мы в данной работе пренебрегаем).
Порядок выполнения работы
Задание I. Определение момента инерции стержня и блока
Подготовьте измерительную систему ИСМ–1 к работе: подключите датчик угла поворота блока к разъему 1 на задней стенке прибора, переключатель 1 поставьте в положение «К1», переключатель 4 – в положение «:1», переключатель 5 – в положение «однокр», переключатель 8 – в положение «+» или «–», переключатель 9 – в среднее положение. Включите питание модуля.
1. Закрепите конец нити на блоке так, чтобы нить не мешала креплению стержня и могла накручиваться на большой блок (R = 25 мм). Укрепите стержень на оси блока, пропустив ось блока через середину стержня, и зафиксируйте его пластиковым фиксатором. 2. Накрутите нить на блок и прикрепите наборный груз т к свободному концу нити. 3. Поверните блок 11 со стержнем 12 так, чтобы прорезь блока совпала с нулевым делением шкалы и добейтесь срабатывания индикатора датчика угла поворота 3. Нажмите кнопку 7 «готов» и осторожно, без толчка, отпустите маятник, который под действием груза придет в движение. После одного полного оборота сработает датчик угла поворота блока и на индикаторе появится значение времени поворота в секундах или миллисекундах в зависимости от положения переключателя 2. Время и массу груза занесите в табл. 1.
Таблица 1
4. Рассчитайте по формуле (16) суммарный момент инерции I стержня блока. 5. Рассчитайте абсолютную и относительную погрешности измерения момента инерции I системы по методу Стьюдента для прямых измерений. Результат запишите в стандартном виде:
Задание II. Измерение момента инерции маятника Обербека в зависимости от положения грузов на стержне 1. Закрепите на стержне 12 симметрично относительно оси вращения два круглых груза 14 (см. рис. 3). Занесите в табл. 2 расстояние от оси вращения до центра грузов r, и массу наборного груза т. 2. Измерьте момент инерции системы так, как это описано в задании I. Данные занесите в табл. 2. Таблица 2
Перемещая грузы 14 по стержню 12, повторите измерения момента инерции I для всех положений грузов (расстояние между отверстиями на стержне d = 20 мм). Постройте график зависимости момента инерции I от квадрата расстояния от оси вращения до центра грузов r 2.
Контрольные вопросы
1. Дайте определение динамических характеристик вращательного движения: момента силы М, момента инерции I, момента импульса L. 2. Вывод основного уравнения динамики вращательного движения. 3. Вывод основной рабочей формулы (16). 4. Выражения для момента инерции материальной частицы, стержня, диска относительно оси, проходящей через центр масс. Как определяется момент инерции относительно произвольной оси? Теорема Штейнера. 5. Провести аналитический расчет момента инерции маятника Обербека. Как рассчитать период колебаний маятника Обербека?
Задания для отчета по лабораторной работе 1. Два маленьких шарика массой m = 10 г каждый скреплены тонким невесомым стержнем длиной l = 20 см. Определить момент инерции 2. Два шара массами m и 2m (m = 10 г) закреплены на тонком невесомом стержне длиной l = 40 см так, как это указано на рис. 4. Определить момент инерции 3. Два шара массами 2m и m (m = 20 г) закреплены на тонком невесомом стержне длиной l = 1 м так, как это показано на рис. 5 Определить момент инерции
Рис. 4 (к задаче 2) Рис. 5 (к задаче 3)
4. Определить момент инерции трехатомной молекулы H2O (рис. 6) относительно оси y, проходящей через центр масс молекулы. Межъядерное расстояние AB обозначено d = 0,097 нм, α = 104о30' . 5. Определить момент инерции трехатомной молекулы SO2 (рис. 6) относительно оси x, проходящей через центр масс молекулы (d = 0, 145 нм, α = 124о).
Рис. 6 (к задаче 6)
6. Определить момент инерции тонкого однородного стержня длиной l = 30 см и массой m = 100 г относительно оси, перпендикулярной стержню и проходящей через точку, отстоящую от конца стержня на 1/3 его длины. Определить момент инерции a = 20 см от одного из его концов.
Рис. 7 (к задаче 7) 8. Вычислить момент инерции J проволочного прямоугольника со сторонами a = 12 см и b = 16 см относительно оси, лежащей в плоскости прямоугольника и проходящей через середины малых сторон. Масса равномерно распределена по длине проволоки с линейной плотностью 0,1 кг/м. 9. Определить момент инерции 10. Определить момент инерции 11. Диаметр диска d = 20 см, масса m = 800 г. Определить момент инерции 12. Найти момент инерции 13. Определить момент инерции 14. В однородном диске массой m = 1 кг и радиусом R = 30 см вырезано круглое отверстие диаметром d =20 см, центр которого находится на расстоянии l = 15 см от оси диска (рис. 8). Найти момент инерции 15. На однородный сплошной цилиндр массой M и радиуса R плотно намотана легкая нить, к концу которой прикреплен груз массой m (рис.9). В момент времени t = 0 система пришла в движение. Пренебрегая трением в оси цилиндра, найти зависимость от времени модуля угловой скорости цилиндра.
Рис. 8 (к задаче 14) Рис. 9 (к задаче 15)
16. Через неподвижный блок массой m = 0,2 кг перекинут шнур, к концам которого подвесили грузы массами m 1 = 0,3 кг и m 2 = 0,5 кг. Определить силы T 1и T 2 натяжения нити по обе стороны блока во время движения грузов, если масса блока равномерно распределена по ободу. 17. Через блок, имеющий форму диска, перекинут шнур. К концам шнура привязали грузы массой m 1 = 100 г и m 2 = 110 г. С каким ускорением будут двигаться грузы, если масса блока m = 400 г. Трение при вращении блока ничтожно мало. 18. Два тела массами m 1 = 0,25 г и m 2 = 0,15 г связаны тонкой нитью, переброшенной через блок (рис. 10). Блок укреплен на краю горизонтального стола, по поверхности которого скользит тело массой m1. С каким ускорением движутся тела, и каковы силы T 1 и T 2 натяжения нити по обе стороны блока? Коэффициент трения µ тела о поверхность стола равен 0,2. Масса m блока равна 0,1 г, и ее можно считать равномерно распределенной по ободу. Массой нити и трением в подшипниках оси блока пренебречь. 19. Однородный сплошной цилиндр массой m = 1 кг висит в горизонтальном положении на двух намотанных на него невесомых нитях (рис.11). Цилиндр отпускают без толчка. а) За сколько времени t цилиндр опустится на расстояние y =50 см? б) Какое натяжение F испытывает при опускании цилиндра каждая из нитей?
Рис. 10 (к задаче 18) Рис. 11 (к задаче 19)
Лабораторная работа № 5 ФИЗИЧЕСКИЙ МАЯТНИК
Цель работы – изучение физического маятника, определение ускорения свободного падения. Приборы и принадлежности: лабораторный модуль ЛКМ-3 со стойкой и блоком, стержень с отверстиями, измерительная система ИСМ-1 (секундомер), пластиковый фиксатор.
Краткая теория
Физический маятник – твердое тело, которое может совершать колебания под действием силы тяжести относительно неподвижной оси O(рис. 1).
Рис. 1. Физический маятник
Запишем основное уравнение динамики вращательного движения. . I β = М,(1) где I – момент инерции маятника;
M = - mga ×sinj,, (2) где т – масса маятника, g –- ускорение свободного падения, а –- расстояние от оси вращения до центра тяжести. Уравнение движения (1) с учетом (2) примет вид I j = - mga ×sinα где ωо2 = (mga)/I,тогда получим уравнение:
Уравнение (3) является линейным дифференциальным уравнением относительно функции φ(t). Если амплитуда колебаний физического маятника не мала, дифференциальное уравнение (3) не будет линейным. Для больших углов отклонений маятника период Т начинает зависеть от амплитуды колебаний φ m . Эту зависимость можно представить суммой бесконечного ряда, первые слагаемые которого равны
При малых колебаниях угол φ мал, поэтому sinφ ≈ φ и уравнение (3) становится дифференциальным уравнением гармонических колебаний
Решение этого уравнения: j = j m cos(ω0t + α), (6)
где α - начальная фаза колебаний, ωо = 2π /Т - циклическая частота колебаний. Запишем формулу периода малых колебаний, как
Получим зависимость периода малых колебаний от расстояния а. Момент инерции, согласно теореме Штейнера, равен
где Iс - момент инерции маятника относительно оси, проходящей через центр масс. Подставляя (8) в (7), получим
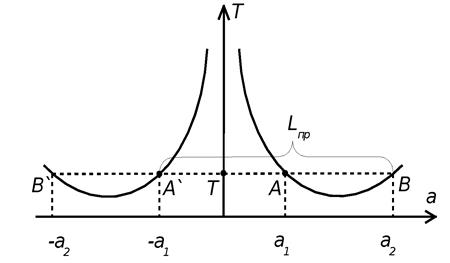
Согласно этой формуле период колебаний Т одинаков при двухразличных значениях а (рис. 2): Т 1 = Т 2 при
Подставим (10) в формулу (9). Получим
Величина называется приведенной длиной физического маятника. Сравнивая формулы (11) и (7) получим
Формула для периода малых колебаний маятника будет иметь следующий вид
В данной работе с помощью физического маятника находится ускорение свободного падения g,которое исходя из уравнения (14),
Приведенная длина Для уменьшения погрешности измерения в эксперименте измеряют период колебаний маятника относительно осей, находящихся по обе стороны от центра тяжести. На рис. 2 представлена теоретическая зависимость периода колебаний от параметра a, которая зеркально симметрична относительно оси Т.
Рис. 2. Зависимость периода колебаний маятника от параметрa a На рисунке приведенная длина маятника L np |

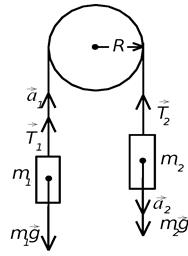 Запишем второй закон Ньютона в векторной форме для движения грузов
Запишем второй закон Ньютона в векторной форме для движения грузов (1)
(1) . Спроецируем векторные уравнения (1) на направление ускорения движения каждого груза.
. Спроецируем векторные уравнения (1) на направление ускорения движения каждого груза. (2)
(2) Из уравнений (2) получим
Из уравнений (2) получим
 , (4)
, (4) . (5)
. (5) ,(6)
,(6) не зависит от масс грузов, а ускорение а зависит от величины k = (т 2 – m 1 )/ (m 1 + m 2 ).
не зависит от масс грузов, а ускорение а зависит от величины k = (т 2 – m 1 )/ (m 1 + m 2 ).
 (9)
(9)
 откуда
откуда (11)
(11) в случае сухого трения в первом приближении постоянно. Рассчитайте коэффициенты
в случае сухого трения в первом приближении постоянно. Рассчитайте коэффициенты  для каждого значения массы и заполните таблицу.
для каждого значения массы и заполните таблицу. , (12)
, (12)


 13. Два груза массами m 1 = 100 г и m 2 = 50 г соединены нерастяжимой нитью, перекинутой через невесомый блок (рис. 8). Грузы прижимаются друг к другу с постоянными силами F = 1 Н. Коэффициент трения между ними µ = 0,1. Найти ускорение, с которым движутся грузы.
13. Два груза массами m 1 = 100 г и m 2 = 50 г соединены нерастяжимой нитью, перекинутой через невесомый блок (рис. 8). Грузы прижимаются друг к другу с постоянными силами F = 1 Н. Коэффициент трения между ними µ = 0,1. Найти ускорение, с которым движутся грузы.
 ,, где a, b, c – константы, b = 2 рад/с2, c = 1 рад/с3. Для точек, лежащих на ободе колеса, найти через время t = 2 с после начала движения: а) угловую и линейную скорости, б) угловое ускорение.
,, где a, b, c – константы, b = 2 рад/с2, c = 1 рад/с3. Для точек, лежащих на ободе колеса, найти через время t = 2 с после начала движения: а) угловую и линейную скорости, б) угловое ускорение.



 (1)
(1) с динамическими характеристиками – моментом силы
с динамическими характеристиками – моментом силы  и моментом инерции I (рис. 1).
и моментом инерции I (рис. 1). . (2)
. (2) , (3)
, (3) , (4)
, (4) – сила, лежащая в плоскости, перпендикулярной оси вращения;
– сила, лежащая в плоскости, перпендикулярной оси вращения;  – вектор, соединяющий точку на оси c точкой приложения силы.
– вектор, соединяющий точку на оси c точкой приложения силы. (6)
(6)
 . (8)
. (8) , (9)
, (9) и отрезком R на рис. 2, равный 90°; sin α= 1.
и отрезком R на рис. 2, равный 90°; sin α= 1. . (10)
. (10) . (11)
. (11) Тангенциальное (касательное) ускорение точек участков нити, намотанной на блок, и точек на ободе блока равны, если нет проскальзывания нити по блоку, и равны ускорению груза m, если нить нерастяжима.
Тангенциальное (касательное) ускорение точек участков нити, намотанной на блок, и точек на ободе блока равны, если нет проскальзывания нити по блоку, и равны ускорению груза m, если нить нерастяжима. (13)
(13) (14)
(14)
 , (17)
, (17) от
от  – линейная. В рассмотренной теории движения маятника Обербека не учитывались силы трения в подшипниках оси блока и сопротивление воздуха. Пренебрежение действием этих сил является главной причиной систематической погрешности измерения момента инерции.
– линейная. В рассмотренной теории движения маятника Обербека не учитывались силы трения в подшипниках оси блока и сопротивление воздуха. Пренебрежение действием этих сил является главной причиной систематической погрешности измерения момента инерции.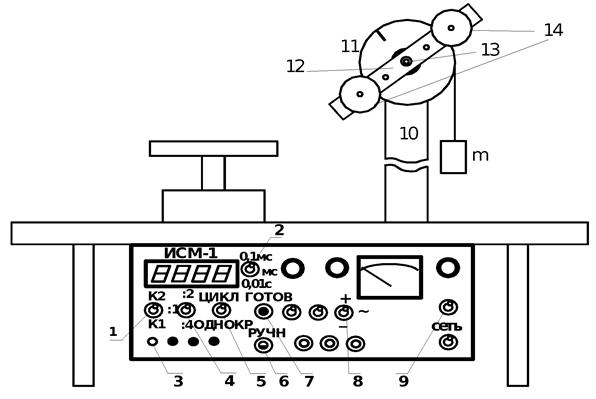 Рис. 3. Маятник Обербека на модуле ЛКМ-3
Рис. 3. Маятник Обербека на модуле ЛКМ-3 кг-м2; ε =...% при α = 0,95.
кг-м2; ε =...% при α = 0,95.

 тонкого однородного стержня длиной l = 60 см и массой m = 100 г относительно оси, перпендикулярной ему и проходящей через точку стержня, удаленную на
тонкого однородного стержня длиной l = 60 см и массой m = 100 г относительно оси, перпендикулярной ему и проходящей через точку стержня, удаленную на 7. На концах тонкого однородного стержня длиной l и массой 3 m прикреплены маленькие шарики массами m и 2 m. Определить момент инерции
7. На концах тонкого однородного стержня длиной l и массой 3 m прикреплены маленькие шарики массами m и 2 m. Определить момент инерции 




 – угловое ускорение, φ – угол отклонения маятника от положения равновесия, М - сумма проекций моментов сил на направление оси вращения. Если момент сил трения много меньше момента силы тяжести, то
– угловое ускорение, φ – угол отклонения маятника от положения равновесия, М - сумма проекций моментов сил на направление оси вращения. Если момент сил трения много меньше момента силы тяжести, то . (3)
. (3) . (4)
. (4) . (5)
. (5) (7)
(7) , (8)
, (8) (9)
(9) , откуда
, откуда . (10)
. (10) (11)
(11) (12)
(12) (13)
(13) . (14)
. (14) . (15)
. (15) находится из формулы (12), в которой а 1и а 2определяются из графика зависимости Т от а, построенного на основе результатов эксперимента.
находится из формулы (12), в которой а 1и а 2определяются из графика зависимости Т от а, построенного на основе результатов эксперимента.