
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Уравнение механической характеристики двигателя.Содержание книги
Поиск на нашем сайте
При рассмотрении существующих моделей асинхронного двигателя с точки зрения их применимости для решения поставленной задачи сделаны следующие выводы: · наиболее простой для расчетов является Г–образная схема замещения, но она, в силу упрощенности, не может быть положена в основу приемлемой модели асинхронного двигателя, так как не обладает достаточной точностью; · наиболее точными являются многоконтурные схемы замещения асинхронного двигателя, однако, эти схемы довольно сложны для расчетов и имеют большое количество параметров, при этом с возрастанием числа контуров и, соответственно, точности схемы возрастает ее сложность и возможная неоднозначность определения параметров. Достаточной точностью и простотой расчетов обладает Т-образная схема замещения асинхронного двигателя. Однако ряд расчетов с использованием “классической” Т-образной схемы замещения показал значительную разницу между заводскими и расчетными данными при значениях скольжения близких к единице, в частности, пусковой ток, рассчитанный по параметрам этой схемы, как правило, получается существенно заниженным по сравнению с каталожными данными. Это объясняется тем, что классическая Т-образная схема создана в основном для анализа и моделирования процессов в асинхронном двигателе при рабочих режимах, то есть при скольжениях, близких к но-
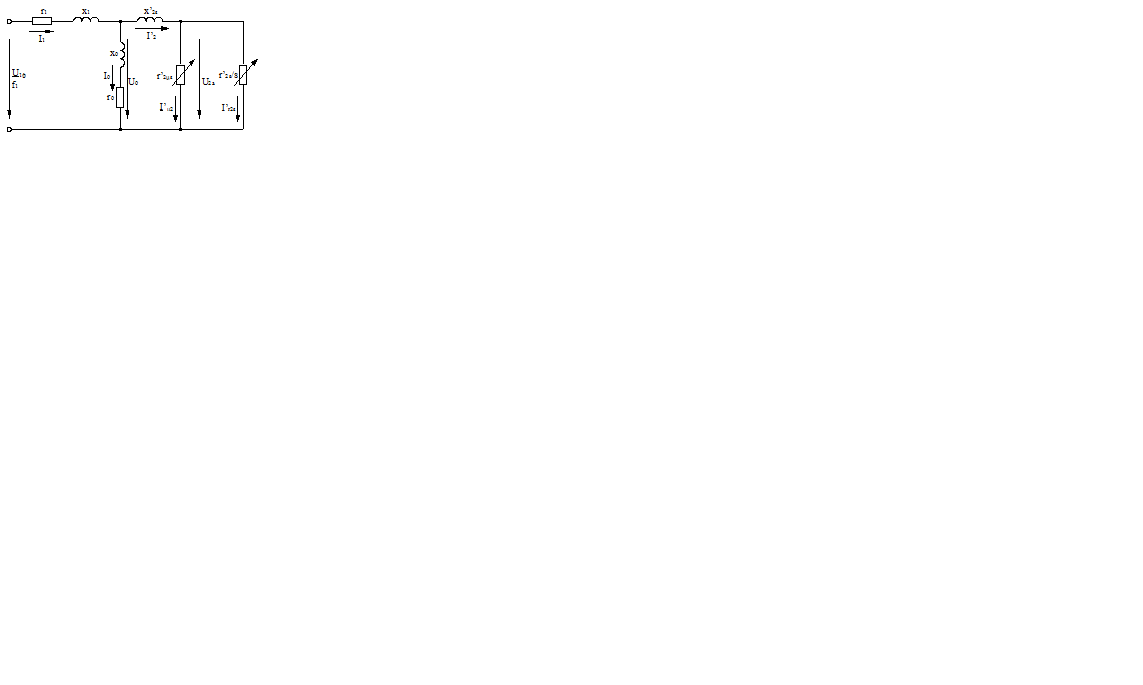
минальному. Данная схема не учитывает магнитные потери в роторе, которые в рабочих режимах невелики, вследствие малой частоты тока ротора. Однако при пуске двигателя частота тока в роторе равна частоте сети и, очевидно, что уже нельзя пренебрегать магнитными потерями в роторе, так как они становятся сопоставимыми с магнитными потерями в статоре машины. Учитывая вышесказанное, предложена схема замещения, сочетающая простоту Т–образной схемы и достаточную точность отображения процессов, происходящих в асинхронном двигателе (рис. 1).
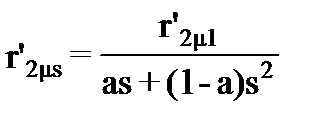
В данной схеме (см. рис. 1) учет магнитных потерь в роторе обеспечен введением дополнительного приведенного активного сопротивления r’2ms, учитывающего потери на перемагничивание стали ротора (пропорциональные частоте тока ротора, а следовательно, скольжению) и потери от вихревых токов (пропорциональные квадрату частоты тока ротора):
где r’2m1 – приведенное пусковое сопротивление магнитной цепи ротора; а – соотношение потерь на перемагничивание и потерь на вихревые токи в составе магнитных потерь ротора. Приведенные активное и реактивное сопротивления ротора:
где r’20 – приведенное активное сопротивление обмотки ротора при нулевом скольжении; x’20 – приведенное реактивное сопротивление рассеяния обмотки ротора при нулевом скольжении; α – доля неактивной части обмотки ротора. Вид зависимостей Kr(s) и Kx(s) определяется формой паза ротора двигателя, а параметры этих зависимостей – его размерами. Для прямоугольного паза [3]:
где Уравнение статической механической характеристики асинхронного двигателя
где р – число пар полюсов двигателя; f1 – частота питающей сети; I’r2s(s) – приведенное значение тока ротора двигателя. Для определения параметров схемы замещения (r’1, r0, r’20, x1, x0, x’20, r’2m1, h’, a, α) создана программа. В качестве исходных данных программа использует заводские каталожные данные двигателя (Uном, Mном, Iном, сos(φ)ном, КПДном, Mпуск, Iпуск, Mкр). Для определения параметров схемы замещения программа использует алгоритм многокритериальной нелинейной оптимизации с наличием ограничений. Критерием оптимизации служит аддитивная свертка отклонений контрольных точек. Реализуется алгоритм методом координатного спуска в десятимерном пространстве переменных. С помощью разработанной программы рассчитаны параметры ряда двигателей. Характеристики, построенные по рассчитанным параметрам, совпадают с заводскими данными с точностью не хуже ±3% для двигателей средней и большой мощности, и не выходят за заводской разброс параметров (±5%) для двигателей малой мощности. Для использования схемы замещения в модели частотно-регулируемого электропривода необходимо индуктивные сопротивления сделать зависимыми от частоты питающего напряжения следующим образом:
|
|||||
|
|
Последнее изменение этой страницы: 2021-05-12; просмотров: 76; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.137.198.181 (0.008 с.) |

 .
. ;
;  ,
, ,
, ,
,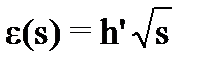 ; h’ – приведенная глубина паза ротора двигателя.
; h’ – приведенная глубина паза ротора двигателя.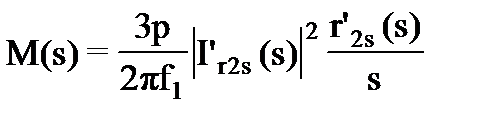 ,
, ;
;  ;
;  .
.


