Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Типовые законы регулированияСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Для регулирования объектами управления, как правило, используют типовые регуляторы, которые можно разделить на аналоговые и дискретные. К дискретным регуляторам относятся импульсные, релейные и цифровые. Аналоговые реализуют типовые законы регулирования, названия которых соответствуют названиям типовых звеньев. Входным сигналом для аналоговых регуляторов является величина ошибки регулирования, которая определяется как разность между заданным и текущим значениями регулируемого параметра (e = х – у). Выходным сигналом является величина управляющего воздействияu, подаваемая на объект управления. Преобразование входного сигнала в выходной производится согласно типовым законам регулирования, рассматриваемым ниже. 1) П-закон (пропорциональное регулирование). Согласно закон пропорционального регулирования управляющее воздействие должно быть пропорционально величине ошибки. Например, если регулируемый параметр начинает отклоняться от заданного значения, то воздействие на объект следует увеличивать в соответствующую сторону. Коэффициент пропорциональности часто обозначают как K1: u = K1.e. Тогда передаточная функция П-регулятора имеет вид WП(s) = K1. Если величина ошибки стала равна, например, единице, то управляющее воздействие станет равным K1.
Примером системы с П-регулятором может служить система автоматического наполнения емкости (сливной бачок). L и Lзад – текущий уровень в емкости (регулируемая величина) и его заданная величина, Fпр и Fсток – расходы жидкости притекающей и стекающей из емкости. Управляющим воздействием является Fпр. Fсток – возмущение. Принцип действия понятен из рисунка: при опустошении емкости поплавок через кронштейн открывает задвижку подачи жидкости. Причем, чем больше разница уровней е = Lзад – L, тем ниже поплавок, тем больше открыта задвижка и, соответственно, больше поток жидкости Fпр. По мере наполнения емкости ошибка уменьшается до нуля и, соответственно, уменьшается Fпр до полного прекращения подачи. То есть Fпр = K1.(Lзад – L). Достоинство данного принципа регулирования в быстродействии. Недостаток – в наличии статической ошибки в системе. Например, если жидкость вытекает из емкости постоянно, то уровень всегда будет меньше заданного. 2) И-закон (интегральное регулирование). Управляющее воздействие пропорционально интегралу от ошибки. То есть чем дольше существует отклонение регулируемого параметра от заданного значения, тем больше управляющее воздействие:
Передаточная функция И-регулятора: WИ(s) = При возникновении ошибки управляющее воздействие начинает увеличиваться со скоростью, пропорциональной величине ошибки. Например, при е = 1 скорость будет равна K0.
Достоинство данного принципа регулирования в отсутствии статической ошибки, т.е. при возникновении ошибки регулятор будет увеличивать управляющее воздействие, пока не добьется заданного значения регулируемой величины. Недостаток – в низком быстродействии. 3) Д-закон (дифференциальное регулирование). Регулирование ведется по величине скорости изменения регулируемой величины:
То есть при быстром отклонении регулирующей величины управляющее воздействие по модулю будет больше. При медленном – меньше. Передаточная функция Д-регулятора: WД(s) = K2s. Регулятор генерирует управляющее воздействие только при изменении регулируемой величины. Например, если ошибка имеет вид ступенчатого сигнала е = 1, то на выходе такого регулятора будет наблюдаться один импульс (d-функция). В этом заключается его недостаток, который обусловил отсутствие практического использования такого регулятора в чистом виде. На практике типовые П-, И- и Д-законы регулирования редко используются в чистом виде. Чаще они комбинируются и реализуются в виде ПИ-регуляторов, ПД-регуляторов, ПИД-регуляторов и др. ПИ-регулятор (пропорционально-интегральный регулятор) представляет собой два параллельно работающих регулятора: П- и И-регуляторы. Данное соединение сочетает в себе достоинства обоих регуляторов: быстродействие и отсутствие статической ошибки. ПИ-закон регулирования описывается уравнением и передаточной функцией WПИ(s) = K1+
То есть регулятор имеет два независимых параметра (настройки): K0– коэффициент интегральной части и K1 – коэффициент пропорциональной. При возникновении ошибки е = 1 управляющее воздействие изменяется как показано на рисунке.
ПД-регулятор (пропорционально-дифференциальный регулятор) включает в себя П- и Д-регуляторы. Данный закон регулирования описывается уравнением и передаточной функцией: WПД(s) = K1 + K2s.
Данный регулятор обладает самым большим быстродействием, но также и статической ошибкой. Реакция регулятора на единичное ступенчатое изменение ошибки показана на рисунке.
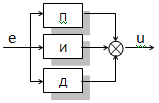
ПИД-регулятор (пропорционально-интегрально-дифференциальный регулятор) можно представить как соединение трех параллельно работающих регуляторов. Закон ПИД-регулирования описывается уравнением:
и передаточной функцией WПИД(s) = K1 +
ПИД-регулятор в отличие от других имеет три настройки: K0, K1иK2. ПИД-регулятор используется достаточно часто, поскольку он сочетает в себе достоинства всех трех типовых регуляторов. Реакция регулятора на единичное ступенчатое изменение ошибки показана на рисунке.
Программы регулирования По принципу регулирования: по отклонению:
Подавляющее большинство систем построено по принципу обратной связи - регулирования по отклонению (см. рисунок 1.9). Принцип действия такой системы рассмотрен выше. по возмущению.
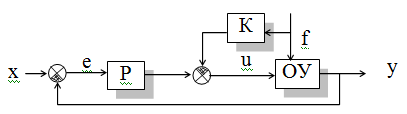
Данные системы могут быть использованы в том случае, если есть возможность измерения возмущающего воздействия. На схеме обозначено К - корректирующее звено.
комбинированные - сочетают в себе особенности предыдущих АСР. Данный способ достигает высокого качества управления, поскольку здесь идет коррекция управляющего воздействия не только по величине ошибки, но и по возмущающему воздействию, однако применение данного способа регулирования ограничено тем, что возмущающее воздействие f не всегда возможно измерить.
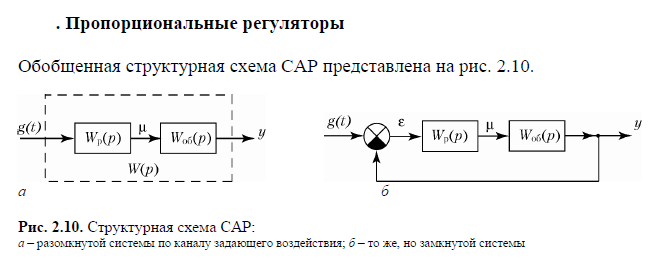
Пропорциональные САР
Для системы регулирования, показанной на рис. 2.10, а, ее амплитудно-фазовая характеристика (АФХ) определяется выражением W (j ω) = W p(j ω) · W об(j ω), (2.5) где W p(j ω) – АФХ регулятора; W об(j ω) – АФХ объекта регулирования. Если комплексная частотная характеристика регулятора будет W p(j ω) = k p, (2.6) то АФХ всей системы запишется в виде W (j ω) = k p · W об(j ω). (2.7) Следовательно, при подключении к объекту регулятора с АФХ (2.6) АФХ системы на каждой частоте увеличивается в k p раз. Такие регуляторы называются пропорциональными (П-регуляторы) и имеют один параметр настройки – коэффициент передачи k p. Переходные процессы в П-регуляторе описываются выражением μ = k p · ε, (2.8) где ε – входное воздействие на регулятор, равное отклонению регулируемой величины от заданного значения; μ – воздействие регулятора на объект, направленное на ликвидацию отклонения регулируемой величины от заданного значения. Комбинированные САР используют оба принципа. а) с воздействием по отклонению регулируемого параметра (принцип Ползунова); б) с воздействием по возмущению, т. е. по изменению нагрузки (принцип Понселе); По свойствам в установившемся режиме различают статические и астатические САР. Статической называют систему, в которой регулируемый параметр в различных установившихся режимах может принимать различные значения. Остаточную ошибку в такой системе называют статизмом. Астатической называют систему, в которой регулируемый параметр в различных установившихся режимах принимает одно и то же значение независимо от величины возмущающего воздействия на объект регулирования. Статизм такой системы всегда равен нулю.
|
||||
|
|
Последнее изменение этой страницы: 2016-04-06; просмотров: 6021; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.169 (0.012 с.) |



 .
. .
.
 .
.
 .
.





 + K2s.
+ K2s.