
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Аэрометрический метод измерения скорости и числа МСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Принцип действия указателя скорости основан на измерении динамического (скоростного) напора полностью заторможенного потока воздуха. Функциональная зависимость p=f(V), (рис. 4.7) между скоростями и давлением определяется с помощью уравнения Бернулли. Это уравнение рассматривается применительно к элементарной струйке, которая выделяется в набегающем потоке воздуха и тормозится в критической точке приемника давления (рис. 4.8).
Величина Δр называется динамическим или скоростным напором, a р2=рп давление – полным давлением. Оно равно сумме статического давления р1=рст и скоростного напора Δ p
Это выражение является градуировочной формулой указателей истинной воздушной скорости на дозвуковых скоростях. Видно, что для измерения скорости V необходимо измерять скоростной напор Δр, статическое давление р1 и температуру Т1 на высоте полета. Если учесть, что скорость звука а в воздухе равна
то выражению (4.39) можно придать вид
Рассмотрим кинематическую схему манометрического указателя скорости.
1 - приемник статического давления; 2 - приемник полного давления; 3 – трубопроводы; 4 - корпус; 5 - манометрическая коробка. Для измерения Δр в герметичный корпус прибора подается давление р1- рст измеряемое приемником полного давления. Измеренное давление поступает в прибор по трубопроводам. Манометрическая коробка деформируется в соответствии с разностью давлений Δр= рп- рст, а извлечение корня из этой величины для получения скорости осуществляется в передаточном механизме. Стрелка показывает измеряемую скорость. Для измерения статического рст и полного рп давлений в набегающем потоке применяют приемники воздушного давления (ПВД). Указатели приборной скорости градуируются по формулам (4.33) (4.38),(4.42) в предположении, что статическое давление Д и температура на высоте полета заменяется этими величинами на уровне моря (р0, Т0). Следовательно, показание прибора будет совпадать с истинной воздушной скоростью только на уровне моря. С подъемом на высоту прибор будет давать заниженные показания в связи с уменьшением р1 и температуры Т1. Без такого прибора невозможно пилотировать самолет. Помимо указателя приборной скорости, необходим прибор дляизмерения истинной воздушной скорости полета. Для получения этой скорости следует измерить, помимо скоростного напора, также статическое давление и температуру на высоте полета. Для измерения статического давления р1 применяется анероидный блок, а для намерения температуры T1 можно применить специальный термометр наружного воздуха. В связи с тем, что измерить температуру T1 на высоте полета не удается с достаточной точностью, вместо измерения ее вводят в показания указателя истинной воздушной скорости компенсационный сигнал, взяв температуру T1 по стандартной атмосфере, т.е. применяют косвенный способ учета температуры воздуха.
В настоящее время применяются комбинированные указатели скорости (КУС), включающие измеритель приборной скорости и измеритель истинной воздушной скорости.
рис.4.10. Кинематическая схема комбинированного указателя скорости: 1—шкала циферблата; 2 — стрелка приборной скорости; 3, 27 — зубчатые секторы; 4, 5, 6, 7, 8, 9, 10, 22, 23, 24 — поводки; 11, 15, 20 — тяги; 12; 25 — оси; 13; 14 — вилки-. 16 — анероидная коробка; 17 — верхний центр анероидной коробки; 18 — манометрическая коробка; 19— верхний центр манометрической коробки; 21 — кривошип; 26, 28 — трубки; 29 — стрелка истинной скорости В герметичном корпусе прибора размещены манометрический блок 1 и анероидный блок 30. Рассмотрим работу указателя приборной скорости. При подаче полного давления в манометрический блок он демпфируется под действием разности полного и статического давлений (скоростного напора). Деформация блока посредством жесткого центра, тяги, поводка и зажима поворачивает ось. Далее движение передается через поводки и на ось. Сектор на оси через трубку передает вращение на стрелку 2 приборной скорости. Отсчет показаний производится по шкале 29. Для получения истинной воздушной скорости прибор дополняется анероидным блоком 30 с соответствующим передаточным механизмом. При деформации анероидного блока движение передается через жесткий центр, тягу, поводок, зажим на ось. Далее через поводки движение передается на ось. При вращении оси через поводки и вращается ось сектора. Последний через трубку вращает стрелку истинной воздушной скорости. Указатель числа М по своему устройству аналогичен указателю воздушной скорости (рис. 4.10). Работа прибора состоит в следующем.Под действием разности давлений Δр манометрический блок деформируется и посредством жесткого центра, тяги, поводка и зажима поворачивает ось. Последняя через поводки поворачивает ось. Затем движение передается через поводки на ось с закрепленным на ней сектором. Сектор вращает трубку и стрелку. Высотная компенсация прибора (т.е. измерение статического рст) осуществляется анероидным блоком, который при изменении деформируется. Его деформация через жесткий центр, тягу, вилку и зажим передается на ось высотной компенсации. Движение этой оси через поводок передается на ось. Указатель числа М имеет равномерную шкалу с делениями от М = 0,4 до М = 2,5 с ценой деления 0,02 А. Погрешность прибора при нормальных условиях не превышает 0,07 М. Многие характеристики самолета зависят от числа М полета, особенно начиная с М>0,6, когда явление сжимаемости нельзя не учитывать. На сверхзвуковых скоростях полета сильно возрастает сопротивление воздухозаборника двигателя. Это приводит к изменению характеристик управляемости самолета. Для того чтобы летчик справился с управлением самолета при изменившихся характеристиках, он должен знать те значения числа М, при которых такое изменение происходит. Для этой цели служит указатель числа М. Конструктивно указатель числа М отличается от указателя истинной воздушной скорости отсчетным устройством и отсутствием коррекции в передаточном механизме по температуре, которая берется по МСА. Погрешности. Указатель приборной скорости не имеет методических погрешностей. Его инструментальные погрешности обусловлены: 1) неточным измерением полного и статического давления с помощью ПВД, что вызывается несовершенством конструкции, местом установки приемника, влиянием углов атаки и скольжения; 2) неточным преобразованием сигналов в измерительной цепи прибора. Указатели истинной скорости имеют методические и инструментальные погрешности. Методическая погрешность возникает при косвенном учете температуры воздуха. Указатели числа М не имеют методических погрешностей. Инструментальные погрешности указателей истинной скорости и числа М аналогичны инструментальным погрешностям датчиков давления. 1. Шкаловые погрешности; 2. Погрешности, вызываемые трением в механизме; 3. Погрешности от неуравновешенности деталей передаточно-множительного механизма; 4. Температурные погрешности; 5. Погрешности гистерезиса. Наибольшую величину имеют погрешности от трения и температурные погрешности. Погрешность, вызываемая трением в механизме, обусловлена наличием сил трения в сопряженных деталях кинематической цепи (в шарнирах, осях, зубчатых парах и т.д.) и трением между щеткой и потенциометром. Изменение температуры окружающей среды по сравнению с температурой градуировки приводит к следующим погрешностям: а) изменение модуля упругости материала, из которого изготовлен упругий чувствительный элемент; б) неодинаковое линейное расширение деталей из различных материалов при изменении температуры; в) изменение сопротивлений рамок логометра. Инструментальные температурные погрешности указателей скорости, в отличие от высотомеров не компенсируются по двум причинам. Во-первых, частичная компенсация этих погрешностей осуществляется за счет того, что измеряемые мембранными коробками величины Δр и р1 делятся друг на друга. Во-вторых, указатели скорости являются более грубыми приборами, поэтому компенсация инструментальных погрешностей не намного повысит точность прибора.
Рис.9. Кинематическая схема вариометра с затухающей шкалой: 26. Указатели углов атаки и скольжения Направление вектора воздушной скорости относительно осей координат, связан. с и.м. ЛА определяется углом атаки и углом скольжения. Для их измерения используют аэрометрические устройства, в том числе флюгерные устройства. При повороте флюгера создается аэродинамический момент:
Mz = mz ·b ·S · γ ·
где b-длина хорды, S- площадь поверхности, γ-плотность воздуха, V- скорость, mz = коэф-нт, зависящий от угла атаки (скольжения)
Р1≠Р2 →∆Р=f(α,β) О
Системы приема воздушных давлений (ПВД) Система ПВД воспринимает полное и статическое давление и передает их по магистралям (трубопроводам) к чувствительным элементам пилотажно-навигационных приборов и систем, систем управления летательным аппаратом, сигнализаторам, бортовым устройствам регистрации параметров полета. К системе приема воздушных давлений относятся приемники воздушных давлений, коллекторы, влаго-отстойники, краны переключения систем ПВД. В эксплуатации применяются приемники трех типов. Приемники типа ПВД воспринимают полное и статическое давление, приемники типа ТП-156(М) и ППД-1, ППД-3, ППД-5 воспринимают только полное давление, приемника ПСД—воспринимают только статическое давление. К дозвуковым относятся ПВД-6М, к сверхзвуковым — ПВД-3, ПВД-4, ПВД-5, ПВД-7 (рис. 10), ПВД-9.
Рис. 11. Приемник полного давления ППД-1:1 — наконечник; 2 — обогревательный элемент; 3 — кожух; 4 — фланец; 5— штепсельный разъем; 6 — штуцер; 7 — трубопровод; 8 — крепежное отверстие; 9 — дренажное отверстие
Приемники воздушного давления всех типов монтируются на самолете таким образом, чтобы дренажные отверстия были обращены вниз. Когда самолет находится на стоянке, приемник должен быть зачехлен. Перед полетом чехол снимается. Для уменьшения аэродинамических погрешностей приемники статического давления устанавливаются на плиты. На центральное отверстие приемника ПВД (ППД, ТП) набегающий поток воздуха оказывает давление,
При проверке работы обогревательных элементов приемников воздушного давления (ПВД, ТП, ППД) под током разрешается включать обогрев на земле не более чем на 2 мин. По истечении этого времени поверхность приемников должна быть ощутимо теплой. Величина тока, истребляемого обогревательным элементом приемника, должна находиться в следующих пределах: для ПВД-4 — 7,5—8,5 А; для ПВД-5, ПВД-7 и ПВД-18 —5,5—6,5 А; для ПВД-6М — 3,4—3,9 А; для ТП-156 (М)—3,5—5 А; для Г1ПД-1(В) — 6,2—6,8 А; для ППД-3—3—5 А; для ППД-5 — 3—6 А.
2 8. СИСТЕМЫ ВОЗДУШНЫХ СИГНАЛОВ С развитием авиационной техники возросли требования к точности измерения аэрометрических параметров. Информация о величинах аэрометрических параметров используется на современных ЛА не только для визуального отображения на приборной доске летчика. Она поступает и в различные системы ЛА в виде электрических сигналов. Для этого используются различные устройства (датчики воздушной скорости, датчики высоты и др.). Число таких устройств на ряде ЛА значительно. Кроме того, велико число каналов связи с потребителями. Чтобы уменьшить массу комплекса, необходимо добиваться минимальных габаритов отдельных приборов, что обычно противоречит требованиям повышения точности. Все это привело к широкому внедрению единых систем вычисления основных аэрометрических параметров полета и выдачи сигналов о них потребителям. Такие аэрометрические системы называют системами воздушных сигналов (СВС). Назначение системы. Унифицированная система воздушных сигналов СВС-72 предназначена для вычисления и выдачи потребителям: - aбсолютной барометрической высоты Ha; - относительной барометрической высоты H; -истинной воздушной скорости V; - приборной скорости Vпр; - числа Маха М; - статистического давления p; - температуры наружного воздуха T. Указанные параметры выдаются потребителям (в бортовую ЦВМ, контрольно-записывающую аппаратуру, самолетный ответчик и др.) в виде: напряжения с синусно-косинусного трансформатора СКВТ (H,V,M); относительного сопротивления. В состав системы СВС11-72-3 входят: - блок воздушных параметров БВП-7; - комбинированный указатель числа М и скорости УМС-2,5; - указатель высоты УВ-30-3; - приемник температуры заторможенного воздуха П-69-2М Системы СВС-72 могут совместно работать с указателями температуры типа УТ-1М и указателями-повторителями высоты и скорости УВ-П и УС-П. Вычисление параметров полета во всех СВС выполняется по единым градуировочным формулам аэрометрических приборов. Число М определяется, как функция отношения динамического pд и статического p давлений (pд- полное давление заторможенного потока воздуха):
V=aM=f (M) а = k- показатель адиабаты (k=1,4); Приборная скорость Vпр есть условная величина, получаемая пересчетом динамического давления рд в величину скорости при стандартной плотности воздуха рс и температуре
-потенциометрической мостовой схеме деления- числа М; -реостатной мостовой схеме умножения- V. В мостовых схемах применены потенциометры прецизионные многооборотные линейные и функциональные типа ППМЛ или ППМФ-М. Исключение составляет потенциометр, с которого снимается сигнал, пропорциональный числу М (СВС1-72-1), однооборотный со средней точкой (ПТП). 29. Назначение системы сигналов с указателем высоты ВБЭ-СВЭ Система воздушных сигналов с указателем высоты ВБЭ-СВЭ (далее по тексту - система) предназначена для измерения, вычисления и выдачи в бортовые системы информации о высотно-скоростных параметрах, индикации барометрической высоты и высоты эшелона, задания высоты эшелона, а также выдачи визуальных и электрических сигналов об отклонении от заданной высоты эшелона. Погрешность выдачи сигналов об отклонении от заданной высоты эшелона не превышает значений допускаемой погрешности по относительной барометрической высоте на каждой проверяемой точке. Система представляет собой конструкцию, состоящую из отдельных функциональных узлов, соединенных между собой механически и электрически. Конструктивно система состоит из следующих узлов: - узла датчиков статистического и полного давлений; - узла вычислителя; - узла индикации. Структурная схема системы Система представляет собой специализированную цифровую вычислительную машину, выполненную на базе микропроцессорного комплекта, состоящую из датчиков статистического и полного давлений (ДД), цифрового вычислителя (В) и блока индикации (УИ) с органами управления (ОУ). Основным устройством вычислителя в системе является центральный процессор (ЦП), который совместно с постоянным запоминающим устройством программы выполняет циклически последовательность команд. Частотный преобразователь (ЧП) предназначен для преобразования частотных сигналов датчиков в двоичный код. Аналого-цифровой преобразователь (АЦП) предназначен для преобразования входной аналоговой информации первичных датчиков в десятиразрядный двоичный код. Запоминающее устройство (ЗУ) включает в себя постоянное запоминающее устройство (ПЗУ) и оперативное запоминающее устройство (ОЗУ) и предназначено для хранения программы вычислений, констант и промежуточных результатов при вычислениях. Приемное устройство (ПУ) предназначено для приема разовых команд. Выходное устройство (ВУ) предназначено для выдачи потребителям информации в виде последовательного двуполярного кода (БПК), кодовых сигналов на устройство индикации системы (УИ) и электрических сигналов на устройство звуковой сигнализации системы (УЗС). Работа системы основана на измерении статистического и полного давлений (Рст, Рп), передаваемых по пневмотракту от приемника ПВД, температуры торможения, поступающей от приемника П-104, и вычислений на основании этой информации высотно-скоростных параметров. Статистическое и полное давление поступают на частотные датчики давления, которые выдают электрические сигналы, пропорциональные измеряемым давлениям. Сигналы с датчиков и управляющие сигналы поступают в блок вычислителя.
БПК
Рк
Рп Рст
Pз Hэ Ft Rxt
+27В
Управляющие сигналы позволяют вырабатывать электрические сигналы атмосферного давления у земли Рз и заданной высоты эшелона Нэ. Величины сигналов, соответствующие этим параметрам, индицируются на счетчиках атмосферного давления у земли и заданной высоты эшелона индикатора системы. В блоке вычислителя системы по сигналам Рст, Рп и выработанным сигналам Рз и Нэ происходит вычисление высотно-скоростных параметров, указанных в табл 2. Коррекция сигналов относительной (Нотн) и абсолютной (Набс) высоты и выработка релейных сигналов об отклонении от заданной высоты эшелона и других релейных сигналов. Сигналы, пропорциональные высотно-скоростным параметрам, в виде кода выдаются во взаимодействующие самолетных системы.
|
|||||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 2296; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.119.141.115 (0.011 с.) |


 (4.33)
(4.33) (4.39)
(4.39)
 где M=V/a – число М полета.
где M=V/a – число М полета.

 Вариометры. Принцип действия измерителей вертикальной скорости полета — вариометров (рис. 9) основан на измерении разности атмосферного давления и давления в корпусе прибора, соединенного с атмосферой через гидравлическое сопротивление (капиллярную трубку). Серийные вариометры типа ВАР (ВАР-30, ВАР-75, ВАР-150, ВАР-300) имеют унифицированный механизм и различаются только шкалами, количеством и длиной капилляров.
Вариометры. Принцип действия измерителей вертикальной скорости полета — вариометров (рис. 9) основан на измерении разности атмосферного давления и давления в корпусе прибора, соединенного с атмосферой через гидравлическое сопротивление (капиллярную трубку). Серийные вариометры типа ВАР (ВАР-30, ВАР-75, ВАР-150, ВАР-300) имеют унифицированный механизм и различаются только шкалами, количеством и длиной капилляров. /2,
/2,
 Рис. 10. Приемник воздушных давлений ПВД-7:
Рис. 10. Приемник воздушных давлений ПВД-7: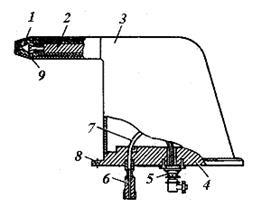 Приемники типа ПВД (кроме ПВД-9), ТП-156 (М), ППД-1 (рис. 11), ППД-3, ППД-5 и некоторые типы приемников статического давления (рис. 12) имеют электрический обогреватель, питаемый от бортовой сети постоянного тока напряжением 27 В.
Приемники типа ПВД (кроме ПВД-9), ТП-156 (М), ППД-1 (рис. 11), ППД-3, ППД-5 и некоторые типы приемников статического давления (рис. 12) имеют электрический обогреватель, питаемый от бортовой сети постоянного тока напряжением 27 В. Рис. 12. Приемник статического давления:
Рис. 12. Приемник статического давления: где P п, P ст — полное и статическое давление воздуха; — плотность воздуха на высоте полета; V —воздушная скорость полета.
где P п, P ст — полное и статическое давление воздуха; — плотность воздуха на высоте полета; V —воздушная скорость полета. Для вычисления истинной воздушной скорости используется соотношение
Для вычисления истинной воздушной скорости используется соотношение , Где а- скорость звука на высоте полета;
, Где а- скорость звука на высоте полета; =c
=c 
 . Формулы пересчета имеют вид
. Формулы пересчета имеют вид Приведенные градуировочные формулы решаются в СВС11-72-3 электромеханическими счетно-решающими устройствами, которые состоят из индукционных систем (решение Vпр) и самобалансирующихся электрических мостов (решение числа М). Решение выходных параметров производится на типовых мостовых схемах:
Приведенные градуировочные формулы решаются в СВС11-72-3 электромеханическими счетно-решающими устройствами, которые состоят из индукционных систем (решение Vпр) и самобалансирующихся электрических мостов (решение числа М). Решение выходных параметров производится на типовых мостовых схемах:



