Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Индукционный магнитный компасСодержание книги
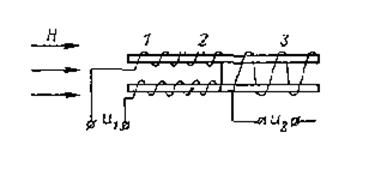
Поиск на нашем сайте Индукционный метод определения направления магнитного поля земли позволяет обойтись без картушки с ее магнитной системой. Для пояснения идеи индукционного метода рассмотрим индукционный элемент (рис.11), состоящий из двух пермаллоевых стержней 1, на которые намотаны подмагничивающая обмотка 2 и сигнальная обмотка 3. Подмагничивающие обмотки охватывают каждый стержень и соединены последовательно, а сигнальная обмотка охватывает оба стержня. Если стержни находятся в горизонтальной плоскости, то горизонтальная составляющая поля земли Н будет создавать в стержнях магнитный поток Ф, величина которого зависит от положения осей стержней по отношению к вектору напряженности. магнитного поля земли. Поток Ф, постоянный по величине, не может наводить ЭДС в сигнальной обмотке 3.
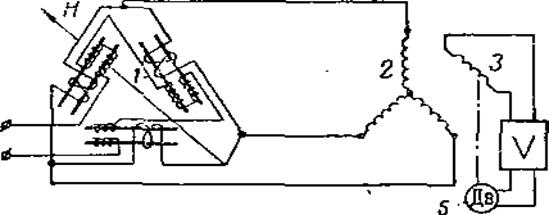
Рис. 11. Схема индукционного элемента: 1—стержень из пермаллоя; 2—подмагничивающая обмотка; 3—сигнальная обмотка Для того чтобы поток Ф наводил в сигнальной обмотке пропорциональную ему ЭДС, необходимо осуществить изменение потока путем изменения магнитной проницаемости стержней. Для этого подмагничивающую обмотку 2 питают переменным напряжением частоты f (например, 400 Гц). Поскольку сила тока в подмагничивающих обмотках дважды за период принимает максимальное значение, то магнитная проницаемость стержней за тот же период дважды становится максимальной и дважды минимальной, т. е. частота изменения проводимости в два раза больше частоты питающего напряжения. Очевидно, поток Ф также будет меняться с двойной частотой На рис.12 приведена принципиальная электрическая схема индукционного компаса. Чувствительный элемент компаса 1 состоит из трех пар пермаллоевых стержней, расположенных под углами 60° друг к другу. Намагничивающие обмотки намотаны на каждый стержень и соединены последовательно, а сигнальные обмотки охватывают оба стержня, соединены в треугольник и связаны тремя проводами со статорными обмотками 2 сельсина-приемника. В однофазной роторной обмотке 3 сельсина наводится ЭДС частотой 800 Гц, зависящая от положения датчика по отношению к направлению магнитных силовых линий поля земли. Если ось обмотки ротора сельсина совпадает с направлением магнитного поля, то ЭДС будет отсутствовать.
Рис. 12. Принципиальная схема индукционного компаса: 1—чувствительный элемент; 2—статор сельсина; 3—ротор сельсина; 4—усилитель; 5—двигатель. Сигналы индукционного датчика по трехпроводной линии поступают на сельсин-приемник. Индукционные компасы обычно применяются в сочетании с гирополукомпасами, являясь для последних корректирующими устройствами в азимуте. Сигнал датчика курса в виде сигнала переменного тока частоты 800 гц поступает в сельсин-приемник, затем с ротора сельсина снимается сигнал той же частоты 800 гц, усиливается в усилителе, преобразуется в сигнал частотой 400 гц, опять усиливается и затем поступает в управляющую обмотку двигателя Поступающий с ротора сельсина на вход усилителя сигнал содержит большое число гармоник, кратных основной частоте питания индукционного датчика 400 Гц. Объясняется это тем, что магнитная проницаемость стержней является нелинейной функцией питающего напряжения.
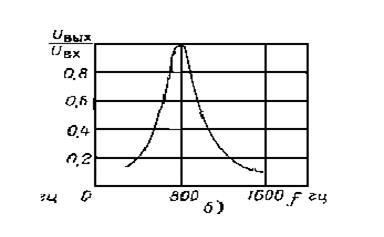
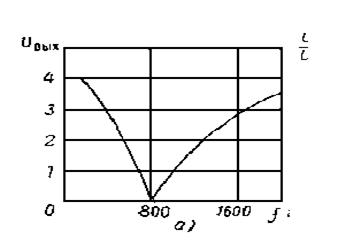
Рис. 15. Амплитудно-частотные характеристики фильтра (а) и предварительного каскада усиления (б). Согласованное положение ротора сельсина с индукционным датчиком будет только тогда, когда вторая гармоника, т. е. напряжение с частотой 400 Гц, будет отсутствовать в сигнале ротора. Остальные гармоники этого сигнала не несут полезной информации и их следует отфильтровывать. Примеры некоторых типов компасов приведены ниже.
|
||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 1022; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.102 (0.009 с.) |

 (типа ДИД-0,5), который, поворачивает ротор сельсина-приемника в положение, согласованное с направлением магнитного поля земли. Кроме того, двигатель
(типа ДИД-0,5), который, поворачивает ротор сельсина-приемника в положение, согласованное с направлением магнитного поля земли. Кроме того, двигатель  потенциометрической следящей системы, обеспечивая передачу информации о магнитном курсе в гироагрегат, вырабатывающий гироскопический курс.
потенциометрической следящей системы, обеспечивая передачу информации о магнитном курсе в гироагрегат, вырабатывающий гироскопический курс.