
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Назначение и классификация АПСодержание книги
Поиск на нашем сайте Назначение и классификация АП Авиационные приборы и бортовые измерительно-вычислительные комплексы служат для контроля параметров полета, работы силовых установок, различных бортовых систем и агрегатов, а также состояния окружающей атмосферы. Выделяют следующие группы авиационных приборов: пилотажно-навигационные приборы и системы; приборы контроля работы силовой установки; приборы контроля работы отдельных бортовых систем и агрегатов; приборы контроля параметров окружающей атмосферы. Пилотажно-навигационные приборы и системы измеряют параметры движения центра масс летательного аппарата (координаты местонахождения, высоту, скорость, линейные ускорения), углы пространственной ориентации летательного аппарата относительно земли (углы курса, крена, тангажа) и относительно набегающего воздушного потока (углы атаки, скольжения). К пилотажно-навигационным приборам и системам относятся аэрометрические приборы (высотомеры, указатели скорости и числа маха, вариометры), системы воздушных сигналов, информационные комплексы высотно-скоростных параметров полета, измерители углов атаки и скольжения, пилотажные гироскопические приборы (авиагоризонты, гировертикаль, гирополукомпасы), курсовые системы, курсовертикали и различные навигационные системы. На современных летательных аппаратах все приборы и системы объединяются в пилотажно-навигационный комплекс, представляющий собой большую информационно-управляющую систему. Приборы контроля работы силовой установки измеряют частоту вращения вала АД, температуру газа и масла, давление топлива, масла и газов, запас и расход топлива, вибрацию и др. параметры. К этой группе приборов относятся тахометры, манометры, термометры, топливомеры, расходомеры, измерители вибрации и другие приборы. Параметрами, характеризующими работу различных бортовых систем и агрегатов, являются: температура, давление и расход жидкостей и газов, положение различных органов управления летательного аппарата и др. Эти параметры измеряются манометрами, термометрами, указателями расхода воздуха, положения закрылков, стреловидности крыла и другими приборами. К параметрам окружающей атмосферы относятся температура, давление, влажность и скорость ветра. Измеряются эти параметры барометрами, термометрами, гигрометрами и измерителями скорости ветра. На ЛА все большее распространение получают различные датчики, служащие для выработки измерительной информации в форме, удобной для ее преобразования и передачи, но не для непосредственного контроля.
Условия эксплуатации АП и ИВК Авиационные приборы эксплуатируются в условиях воздействия климатических, механических и других факторов. Интенсивность воздействия таких факторов на приборы зависит от типа летательного аппарата, его летно-технических характеристик и места установки авиационных приборов на летательном аппарате. К климатическим факторам относятся прежде всего температура, давление и влажность воздуха. Температура окружающего воздуха может изменяться в пределах от +60 до —60° С, температура воздуха в не герметизируемых зонах летательного аппарата может достигать +100° С, а в зоне двигателя до +300° С. Изменение температуры влияет на линейные размеры деталей, упругость чувствительных элементов и пружин, электрическое сопротивление проводников, состояние смазки трущихся деталей, состояние пластмасс изоляционных материалов. Для снижения вредного влияния температуры на авиационные приборы выбирают материалы с малыми температурными коэффициентами, применяют термостатирование и устройства температурной компенсации, используют специальные смазки и т. д. Давление окружающего воздуха зависит от высоты полета. Снижение давления ухудшает отвод тепла от приборов, усиливает испарение смазки,ухудшает коммутацию, снижает работоспособность негерметичных приборов. Для предотвращения вредных последствий влияния пониженного атмосферного давления применяют изоляционные материалы повышенного качества, уменьшают количество контактных групп, улучшают герметичность приборов, трубопроводов и отсеков с оборудованием. Относительная влажность воздуха может изменяться от 0 до 100% при высотных полетах и при полетах в нижних слоях атмосферы. Для авиационных приборов наиболее опасна повышенная влажность воздуха, которая ухудшает электрическую изоляцию деталей, изменяет диэлектрическую проницаемость материалов, ускоряет коррозию металлов, создает угрозу заклинивания подвижных частей приборов или закупорки трубопроводов при возможном замерзании влаги. Для уменьшения влияния повышенной влажности на авиационные приборы производят осушку воздуха в кабинах и отсеках, применяют нержавеющие материалы, лакокрасочные и гальванические покрытия,применяют герметизацию и обогрев приборов. К механическим факторам относятся ускорения, удары, вибрации и шумы. Воздействие механических факторов вызывает смещение положения равновесия подвижных частей приборовприналичии небаланса, увеличение зоны застоя в опорах, нарушение прочности узлов крепления, ускоренный износ осей, опор и подшипников, снижение точности работы приборов. Для уменьшения влияния механических факторов на приборы используются индивидуальная амортизация приборных досок, тщательная балансировка подвижных частей приборов, прочные и твердые конструкционные материалы, обязательная проверка изготовленных приборов на воздействие механических факторов. К другим эксплуатационным факторам относятся солнечная радиация, пыль, дождь, снег, электрические и магнитные поля и др. Против этих факторов в авиационных приборах также используются определенные защитные меры. Разработка авиационных приборов осуществляется с учетом перечисленных эксплуатационных факторов. Изготовленные приборы в соответствии с требованиями действующих стандартов подвергаются испытаниям на воздействие указанных эксплуатационных факторов.
Турбинные расходомеры Приборы и датчики, измеряющие расход топлива в единицу времени (расходомеры), применяются для выдерживания наиболее экономичного режима полета, отвечающего минимуму расхода горючего на километр пройденного пути (с учетом скорости полета. Принцип действия тахометрических (скоростных или турбинных) расходомеров основан на зависимости скорости вращения расположенной в трубопроводе ненагруженной тангенциальной крыльчатки (турбины) от расхода жидкости. Достоинством метода является пропорциональная зависимость скорости вращения крыльчатки от расхода жидкости. Частота вращения крыльчатки зависит не только от величины расхода, но также от вязкости жидкости (температуры), что вызывает появление погрешностей прибора. В приборах мгновенного расхода сигнал тахогенератора (напряжение или частота) служит мерой измеряемого расхода. В массовых расходомерах помимо частоты измеряют плотность ρВ качестве измерителей частоты применяют тахогенераторы переменного тока. Измерение угловой скорости осуществляется магнитоиндукционным тахометрическим узлом (рис.8).
Рис. 8. Кинематическая схема датчика расходомера Постоянный магнит 2 узла приводится во вращение крыльчаткой 1. Для уменьшения температурных погрешностей применен термомагнитный шунт 3. Герметичность датчика обеспечивается применением диамагнитного кожуха 4. При вращении магнита в чувствительном элементе 5 наводятся вихревые токи, взаимодействующие с полем магнита. Поворот чувствительного элемента (стакана) ограничивается противодействующей пружиной 6. Очевидно, угол поворота стакана пропорционален мгновенному расходу топлива. На оси стакана находится ротор сельсина-датчика 7 синхронной передачи.Сельсин-приемник помещен в указателе прибора, причем его ротор перемещает стрелку прибора в соответствии с изменением мгновенного расхода топлива. Схема сельсинной передачи представлена на рис.9. Обмотки возбуждения 1 и 1’ и обмотки синхронизации 2 и 2’ размещены на статоре сельсина-датчика (С–Д) и сельсина-приемника (С–П).
мгновенного расхода Цилиндрический ротор сельсина состоит из двух пакетов листовой электротехнической стали, впрессованных в пластмассу. Индуктируемые в синхронизирующих обмотках 2 и 2’ эдс зависят от углового положения роторов. При несинхронном положении роторов возникает синхронизирующий момент, устанавливающий ротор сельсина-приемника в положение, синхронное с ротором датчика. Шкала мгновенного расхода градуируется в кг/ч. Погрешности Представленные расходомеры являются приборами косвенного метода измерения, поэтому им свойственны методические погрешности. Погрешности при замене сорта топлива могут достигать 5 – 6 %. Они учитываются поправочными графиками. Методическая погрешность из-за изменения плотности при замене сорта топлива в расходомерах. Погрешность измерения может также возникать из-за еравномерного распределения скорости течения топлива по поперечному сечению датчика расхода. Инструментальные погрешности расходомеров складываются из погрешностей преобразователя, измерительной схемы и указателя. Температурные инструментальные погрешности в расходомерах мгновенного расхода компенсируются термомагнитным шунтом.
Типы топливомеров Приборы, измеряющие объемное или весовое количество топлива в баках, называются топливомерами. Они позволяют экипажу самолета в любой момент полета определить, сколько топлива имеется в баках, и оценить время, в течение которого можно продолжать полет. Подобные приборы служат также для измерения запаса масла (масломеры). С помощью топливомеров определяют суммарный запас топлива во всех баках и количество топлива в каждом из них в отдельности. Необходимо знать, как распределено топливо между баками, для того чтобы определить правильную последовательность расходования топлива из баков во избежание недопустимого смещения центра масс самолета. Переключением баков управляют автоматические устройства топливомеров. Классифицируя топливомеры по принципу действия чувствительного элемента, можно отметить следующие типы: 1) поплавковые, основанные на измерении уровня (объема) топлива с помощью плавающего на поверхности поплавка; 2) манометрические, основанные на измерении давления (веса) столба топлива с помощью манометра; 3) емкостные, основанные на измерении уровня (объема) топлива с помощью специального конденсатора, емкость которого связана функционально с уровнем топлива в баке. Топливомеры должны быть дистанционными. Этому требованию удовлетворяют электрические топливомеры. Механические топливомеры, не являясь дистанционными, почти не применяются в авиации. Поплавковые топливомеры Измерение запаса топлива или масла в баке летательного аппарата с помощью электрического рычажно-поплавкового топливомера (масломера) основано на принципе преобразования неэлектрической величины – переменной высоты уровня жидкости в электрическую величину – переменное активное сопротивление, меняющееся в соответствии с изменением уровня жидкости. Электрические рычажно-поплавковые топливомеры предназначены не только для измерения количества топлива, но и для управления централизованной автоматической заправкой и выработкой топлива из топливных баков, а также для сигнализации аварийного остатка топлива в баках летательного аппарата. Принцип действия емкостного топливомера основан на зависимости величины емкости специального конденсатора от уровня топлива в баке. Существенным преимуществом емкостных топливомеров по сравнению с поплавковыми является отсутствие в датчике подвижных частей, кроме того, в этих приборах погрешности при кренах и ускорениях самолета меньше, чем в поплавковых. Емкостные топливомеры применяются для измерения количества всех видов топлива, но оказываются почти незаменимыми в случае измерения количества химически активных жидкостей, применяемых в качестве горючих компонентов в жидкостно-реактивных двигателях. Погрешности электрических поплавковых топливомеров складываются из следующих составляющих: – погрешностей, являющихся следствием продольных и поперечных кренов и ускорений самолета; – погрешностей, возникающих при неточной установке топливных баков и отклонений их размеров от полученных при расчете и тарировке; – температурных погрешностей, вызванных изменением температуры топлива в баке и сменой сорта топлива; – температурных погрешностей, появляющихся из-за изменения магнитных характеристик и электрических параметров при изменении температуры окружающей среды; – погрешностей, возникающих из-за изменения напряжения источника питания. Погрешность из-за неточного совпадения профиля датчика с характеристикой бака. Кроме того, емкость зависит от углов крена g и тангажа u, от ускорения j и диэлектрической постоянной топлива e1, т. е. С=F1(V, u, g, j, e1 ) C =F2 (G, V, u, g, j, e1, r ), r — плотность топлива. Инструментальные погрешности емкостного топливомера вызываются главным образом влиянием температуры на параметры элементов мостовой схемы (конденсаторов, сопротивлений), они малы.
Емкостные топливомеры Принцип действия емкостного топливомера основан на зависимости величины емкости специального конденсатора от уровня топлива в баке. Чувствительный элемент емкостного топливомера (рис. 3) представляет собой цилиндрический конденсатор с внутренним электродом 1,внешним 2 и изоляционным слоем 3. Между изоляционным слоем и внешним электродом находится слой жидкости (топливо, кислота), уровень которой необходимо измерить. Если уровень жидкости в баке изменяется, то будет изменяться и емкость конденсатора вследствие того, что диэлектрические постоянные жидкости и воздуха различны.
1 - внутренний электрод; 2 - внешний электрод; 3 - изоляционный слой. Основные соотношения. Для вывода зависимости между уровнем топлива в баке и емкостью датчика введем следующие обозначения (см. рис. 3): e1, e2, e3— диэлектрические постоянные жидкости, материала изолятора и смеси паров жидкости и воздуха соответственно; R 1, R 2, R 3— радиусы внутреннего электрода, изолятора и внешнего электрода; х — уровень жидкости; h —полная высота датчика. Если пренебречь концевым эффектом, то можно принять, что емкость нижней части цилиндрического конденсатора будет
Суммируя емкости Сх и Ch, получим полную емкость конденсатора:
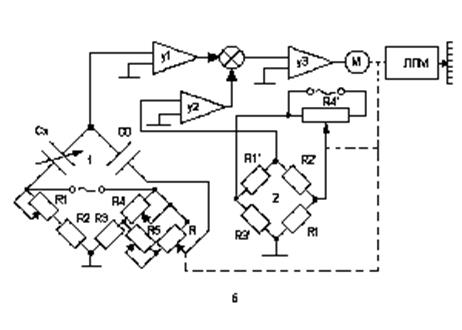
. Рис.11. Принципиальная электрическая схема емкостного измерительного моста
Измерительная часть электроемкостного топливомера представляет собой самоуравновешивающийся мост переменного тока, одним плечом которого является емкость датчика Сх. На рис. 11 представлена принципиальная электрическая схема измерения количества топлива, состоящая из основного измерительного моста 1 и дополнительного (компенсационного) 2. Мосты питаются переменным током напряжением 115 В, 400 Гц. В плечи моста 1 включены емкости Сх, С о и сопротивления R l, R 2, R 3, R 4, R5, R. При изменениях емкости датчика Сх нарушается равновесие моста и на входе усилителя У1 появляется сигнал, который через сумматор поступает на усилитель УЗ, а затем на двигатель отработки М, который перемещает через лентопротяжный механизм ленту показывающего прибора. Показывающий прибор топливомера может быть выполнен и с круглой шкалой, тогда двигатель отрабатывает через редуктор стрелку прибора. При перемещении стрелки (или ленты в ЛПМ) одновременно отрабатывается щетка потенциометра R, уравновешивающего мост. Переменные резисторы R 1 и R 5 служат для регулировки моста при пустом и полностью заправленном баке (регулировка «нуля» и «максимума»). Погрешности: 1.методические погрешности- а)Под действием ускорений и эволюции самолета топливо в баках перераспределяется, что приводит к изменению емкости Сх датчика. в) Погрешность из-за неточного совпадения профиля датчика с характеристикой бака. Кроме того, емкость зависит от углов крена g и тангажа u, от ускорения j и диэлектрической постоянной топлива e1, т. е. С=F1(V, u, g, j, e1 ) C =F2 (G, V, u, g, j, e1, r ), r — плотность топлива. Инструментальные погрешности емкостного топливомера вызываются главным образом влиянием температуры на параметры элементов мостовой схемы (конденсаторов, сопротивлений), они малы.
Канал измерения давления Приборы, предназначенные для измерения давления называются манометрами. По назначению авиационные манометры делят на манометры, измеряющие абсолютное давление, разность давлений (дифференциальные) и отношение двух давлений. Дифференциальные манометры используются для измерения избыточных давлений жидкостей и газов в различных отсеках авиационных двигателей (в топливной системе, системе смазки и т.д.). Манометры абсолютного давления (моновакууметры) применяются для измерения давления во всасывающих системах. Манометры отношения давлений служат для контроля степени сжатия газов в различных ступенях газотурбинных двигателей. Помимо манометров со стрелочной индикацией, на летательных аппаратах широко применяются сигнализаторы и датчики давлений. Сигнализаторы давлений включают электрический сигнал при выходе измеряемого давления за допустимые для нормальной работы двигателя пределы. Датчик давления выдает электрический сигнал, пропорциональный измеряемому давлению и используемый для автоматического управления системами ЛА или для дальнейшей передачи на указатели в дистанционных манометрах. По методам измерения давления манометры можно разделить на следующие группы: - механические (недистанционные), в том числе жидкостные, весовые и пружинные. - электромеханические, в которых механический чувствительный элемент сочетается с электрической дистанционной передачей. - электрические, в том числе электронные, газоразрядные, радиоактивные, тепловые пьезорезисторные.
Рис. 5. Структурная схема датчика давления. В измерительных упругих элементах происходит преобразование измеряемого давления в усилие, которое деформирует упругий элемент и уравновешивается возникающими в нем упругими силами. В чувствительном элементе датчика происходит преобразование физической величины, в данном случае деформации упругого элемента, в электрический сигнал. Упругой характеристикой принято называть зависимость между перемещением λ определенной (измерительной) точки упругого элемента и величиной нагрузки Р (давление). Чувствительность S упругого элемента является одним из основных его параметров и выражается отношением. Для упругих элементов с линейной характеристикой: S=λ/p. Понятие эффективной площади вводят для мембран и сильфонов:
где Q – сила, которую развивает мембрана или сильфон в измерительной точке под воздействием давления р. Типы упругих элементов
Струна Частотные датчики давления
Гофрированная мембрана с тороидальным краевым гофром и линейной характеристикой. Тензорезисторные и гальваномагнитные датчики давления. Обычный малогабаритный сильфон. Гальваномагнитные датчики давления. (Схему включения смотри в тетради) полупров. и частотные датчики
Полупроводниковые измерители давления: Частотные датчики давления:
Основной погрешностью емкостных датчиков является температурная погрешность, вызванная смещением электродов (пластин) конденсатора при изменении температуры за счет неравенства значений температурных коэффициентов линейного расширения материала элементов конструкции. Эта погрешность устраняется либо конструктивным путем, либо изготовлением всех деталей емкостного преобразователя из металла одной марки и одной марки изолятора Гистерезисом называют неоднозначность хода статической характеристики датчика при увеличении и уменьшении входной величины. Гистерезис выражается в процентах:
где B max и B min– изменениевыходной величины в рабочих пределах. Погрешности датчиков давления.К инструментальным погрешностям манометра относятся: 1. Шкаловые погрешности; 2. Погрешности, вызываемые трением в механизме; 3. Погрешности от неуравновешенности деталей передаточно-множительного механизма; 4. Температурные погрешности; 5. Погрешности гистерезиса.
Наибольшую величину имеют погрешности от трения и температурные погрешности. Изменение температуры окружающей среды по сравнению с температурой градуировки приводит к следующим погрешностям: а) изменение модуля упругости материала, из которого изготовлен упругий чувствительный элемент; Величина погрешности от изменения модуля упругости неодинакова по всей шкале: при нулевой разности давлений, погрешность равна нулю; с увеличением разности давлений погрешность возрастает. Абсолютное значение температурной погрешности, вызванное изменением модуля упругости
где l - температурный коэффициент модуля упругости; Оптический пирометр в ГТД Пирометр спектрального отношения разработан для измерения температуры газового потока, состоящего из продуктов сгорания углеводородных топлив, в диапазоне 1500-2500К по излучению паров воды в близкой ИК-области спектра, а также для измерения температуры раб.лопатки Т. Практическое применение нашел яркостный метод. Требования к пирометру: 1. высокая точность (порядка +-100С в диапазоне 700..10000С) 2. малая постоянная времени 3. малый вес и габариты 4. выдерживать жесткие условия работы 5. промежуточная среда м/у пирометром и объектом не должна оказывать влияния на результаты.
I=S*Ф Uвых=I*Roc Еs=С1*λ-5*е-(С2/λ*Т)-энергия, излучаемая нагретым телом. Е= Еs*ε, где Е-энергия воспринимаемая фотоприемником, ε-коэф-т излуч. спо-сти
К1-харак-ет пропускную способность оптической средым/у лопаткой и фотоприемником; К2-характеризует изменение расст-ия и углов?визирования? м/у пов-тью РЛ и и осью фотоприемника К3-коэф-т пропускания оптики К4-коэф-т закопчения защитного стекла. Вых. Сигнал пирометра может характеризовать температуру максимально перегретой лопатки, среднюю максимальную температуру, среднее значение тем-ры, ср линейную температуру.
Тахометры. Приборы, предназначенные для измерения частоты вращения, называются тахометрами. Тахометры применяются для измерения частоты вращения вала двигателя и его агрегатов. По величине частоты вращения можно судить о тяге и о динамической и тепловой напряженностях. Наибольшее распространение получили следующие методы измерения частоты вращения по принципу действия чувствительного элемента ЧЭ: - центробежные, в которых ЧЭ реагирует на центробежную силу, развиваемую неуравновешенными массами при вращении вала; - магнитоиндукционные, основанные на зависимости наводимых в металлическом теле вихревых токов от частоты вращения; - электрические постоянного, переменного или импульсного тока, основанные на зависимости генерируемого напряжения от частоты вращения; - фотоэлектрические, основанные на модуляции светового потока вращающимися элементами и др. Центробежные тахометры выполняются в двух вариантах: конический (рис.1 а) и кольцевой (рис.1 б).
Рис.1 а – конический тахометр; б – кольцевой тахометр; 1- муфта; 2 - пружина Центробежные тахометры развивают большое перестановочное усилие, поэтому применяются в качестве датчиков в регуляторах частоты вращения. Недистанционность центробежных тахометров, значительные погрешности и технологические трудности привели к тому, что эти приборы в авиации не применяются, хотя в других подвижных объектах они находят широкое применение. Магнитоиндукционные тахометры бывают двух типов: с цилиндрическим ЧЭ (рис.2 а) и с дисковым ЧЭ (рис. 2 б).
Рис. 2 а – тахометр с полым цилиндром; б – тахометр с диском; 1 – магнит; 2 – чувствительный элемент; 3 – термомагнитный шунт; 4 – магнитопровод. Погрешности тахометра возникают из-за непостоянства магнитной индукции в зазоре В, сопротивления рамки Rр и внутреннего сопротивления якоря RB Уменьшение погрешности, вызванной изменением В, достигается применением термомагнитного шунта. Для уменьшение погрешности от непостоянства Rр применяется добавочное сопротивление RД и другие схемы компенсации. Электрические тахометры постоянного тока (рис. 3) включают тахогенератор постоянного тока и гальванометр.
Рис. 3. а – тахогенератор Тахогенераторы бывают двух типов: с ограниченным (рис.3 а) и неограниченным (рис.3 б) углом поворота ротора. Тахогенератор с ограниченным углом поворота выполняется с неподвижной статорной обмоткой, внутри которой помещается постоянный магнит, связанный с валом, скорость вращения которого контролируется. Тахогенераторы подобного типа применяются в качестве датчиков угловой скорости и скоростной обратной связи в системах управления полетом. Достоинство их – отсутствие коллектора и щеток. Тахометр постоянного тока состоит из тахогенератора с неограниченным углом поворота ротора и гальванометра. Основными элементами тахогенератора являются постоянные магниты 1 с соответствующими магнитопроводами, обмотка якоря 2 и коллектор со щетками 3.
В тахометрах переменного тока тахогенератор состоит из вращающегося постоянного магнита и статорной обмотки. ЭДС тахогенератора равна
Отсюда следует, что измерение угловой скорости Среди тахометров переменного тока особое место занимают индукционные тахометры. Тахогенератор такого прибора (рис. 5); представляет собой электрическую машину асинхронного типа, состоящую из внешнего 1 и внутреннего 2 магнитопроводов, в зазоре между которыми располагаются статорная обмотка 3 (состоящая из обмотки возбуждения и сигнальной обмотки) и алюминиевыми тонкостенный ротор 4, выполненный в виде цилиндра. Оси обмоток (катушек) возбуждения и сигнальной взаимно перпендикулярны.
Рис. 5. 1,2- магнитопроводы; 3 – обмотка; 4– ротор; Цифровой тахометр. В последнее время широкое распространение получили тахометры с цифровой частью, то есть цифровые тахометры. Они строятся на основе тех же датчиков, что и аналоговые, добавляется только цифровая часть.
Акселерометры Для измерений ускорений и перегрузок, воздействующие на отдельные элементы и на весь ЛА в целом, используются акселерометры. Знание перегрузок необходимо для управления самолетом. Акселерометры могут измерять линейные и угловые ускорения и перегрузки. Ускорения, воздействующие на ЛА могут измеряться относительно осей, связанных с центром масс ЛА и относительно осей связанных с Земной поверхностью. Ускорение можно определить следующими медодами: 1)инерциальным;2)дифференцированием известных скоростей;3)двойным дифференцированием перемещений.
m-инерционная масса; Fu=m*a Fu=Fn
Линейное и угловое перемещения могут быть определены с помощью: реостатного, индуктивного и емкостного преобразователей перемещений. Акселерометры могут быть реализованы с применением схем прямого преобразования, компенсационных схем. Необходимо иметь 3 угловых и 3 линейных акселерометра по 3 осям координат. Методы измерения высоты Приборы, предназначенные для измерения высоты полета ЛА над поверхностью, называются высотомерами. При полетах различают абсолютную высоту – высоту относительно уровня моря, относительную высоту – высоту полета относительно места взлета или посадки, истинную высоту, т.е. высоту над пролетаемой местностью. Значение абсолютной высоты необходимо для установления коридоров на маршрутах полета, а также при испытании самолетов и двигателей; относительная высота должна быть известна при взлете и посадке; а истинная высота – во всех случаях полета. Известно несколько методов измерения высоты полета: - барометрический; - радиотехнический; - инерционный. Барометрический метод измерения высоты полета базируется на зависимости абсолютного давления в атмосфере р от высоты Н. При выводе градуировочных формул высотомера понадобятся также зависимости плотности g и абсолютной температуры Т от высоты. Эти зависимости являются статическими, т.к. давление, плотность и температура на одной и той же высоте не остаются постоянными, а испытывают значительные случайные вариации зависящие от времени суток и года, облачности. Для вывода зависимости между параметрами атмосферы и высотой Н рассмотрим цилиндрический столбик воздуха площадью S на высоте Н (рис. 6):
Рис.6. Из условия равновесия сил, действующих на столбик, находим:
|
|||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 1310; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.102 (0.019 с.) |


 Рис. 9. Схема сельсинной передачи тахометрического расходомера
Рис. 9. Схема сельсинной передачи тахометрического расходомера Рис. 3 Схема чувствительного элемента емкостного топливомера:
Рис. 3 Схема чувствительного элемента емкостного топливомера: Подобно этому емкость верхней части конденсатора найдем из соотношения
Подобно этому емкость верхней части конденсатора найдем из соотношения
 Из этого выражения следует, что емкость конденсатора является линейной функцией уровня жидкости х. Таким образом, измерение уровня жидкости можно свести к измерению емкости конденсатора С. Чувствительность емкостного датчика определяется выражением
Из этого выражения следует, что емкость конденсатора является линейной функцией уровня жидкости х. Таким образом, измерение уровня жидкости можно свести к измерению емкости конденсатора С. Чувствительность емкостного датчика определяется выражением наибольшая чувствительность будет в том случае, когда R 2/ R 1 стремится к 1, т. е. когда слой изоляции отсутствует. При этом получим:
наибольшая чувствительность будет в том случае, когда R 2/ R 1 стремится к 1, т. е. когда слой изоляции отсутствует. При этом получим:
 . Емкостные топливомеры, выполняют следующие функции:– измеряют количество топлива в группах баков и суммарное количество топлива на самолете;– управляют выработкой топлива по заданной программе;– осуществляют управление заправкой топлива; – сигнализируют о выработке топлива из определенной группы баков и об остатке топлива на определенную продолжительность полета. В основу работы измерительной части топливомера положен электроемкостный метод измерения запаса топлива.
. Емкостные топливомеры, выполняют следующие функции:– измеряют количество топлива в группах баков и суммарное количество топлива на самолете;– управляют выработкой топлива по заданной программе;– осуществляют управление заправкой топлива; – сигнализируют о выработке топлива из определенной группы баков и об остатке топлива на определенную продолжительность полета. В основу работы измерительной части топливомера положен электроемкостный метод измерения запаса топлива. При использовании чисто механических манометров давление должно подводиться с помощью трубопроводов непосредственно к приборной доске самолета. дистанционные электромеханические манометры, в которых датчик, содержащий механический чувствительный элемент с электрическим преобразователем, устанавливается непосредственно у объекта измерений. При этом электрические сигналы, снимаемые с датчика, передаются по электропроводам и воспринимаются расположенным на приборной доске электроизмерительным прибором или используется в системах автоматического регулирования.
При использовании чисто механических манометров давление должно подводиться с помощью трубопроводов непосредственно к приборной доске самолета. дистанционные электромеханические манометры, в которых датчик, содержащий механический чувствительный элемент с электрическим преобразователем, устанавливается непосредственно у объекта измерений. При этом электрические сигналы, снимаемые с датчика, передаются по электропроводам и воспринимаются расположенным на приборной доске электроизмерительным прибором или используется в системах автоматического регулирования.
 Балка, заделанная с двух сторон Тензорезисторные датчики контактных давлений:
Балка, заделанная с двух сторон Тензорезисторные датчики контактных давлений: ;
;  ;
; 
 Плоская мембранная плита, выполненная за одно целое с корпусом датчика. Применяется в емкостных датчиках, рассчитанных на высокие давления.
Плоская мембранная плита, выполненная за одно целое с корпусом датчика. Применяется в емкостных датчиках, рассчитанных на высокие давления.
 Плоская сварная мембрана. Тензорезисторные, гальваномагнитные и емкостные датчики давления.
Плоская сварная мембрана. Тензорезисторные, гальваномагнитные и емкостные датчики давления.



 ,
,
 Основной задачей при выборе метода является выбор фотоприемника. В качестве фотоприемника применяют кремниевый фотодиод, т.к. он обладает наибольшей относительной спектральной чувствительностью.
Основной задачей при выборе метода является выбор фотоприемника. В качестве фотоприемника применяют кремниевый фотодиод, т.к. он обладает наибольшей относительной спектральной чувствительностью. где Ф-световой поток, падающий на пов-ть,ω-телесный угол.
где Ф-световой поток, падающий на пов-ть,ω-телесный угол. где А-коэф-т
где А-коэф-т



 ; б – тахометр постоянного тока: 1 – магниты; 2 – обмотка якоря; 3 – коллектор.
; б – тахометр постоянного тока: 1 – магниты; 2 – обмотка якоря; 3 – коллектор.
 (2.7)
(2.7) можно осуществить как путем измерения частоты переменного тока (равной частоте вращения) (рис. 4 б), так и путем измерения величины напряжения
можно осуществить как путем измерения частоты переменного тока (равной частоте вращения) (рис. 4 б), так и путем измерения величины напряжения  (рис. 4 в). Поскольку частота переменного тока равна частоте вращения вала, то первый способ измерения; имеет бесспорные преимущества перед вторым.
(рис. 4 в). Поскольку частота переменного тока равна частоте вращения вала, то первый способ измерения; имеет бесспорные преимущества перед вторым.






