
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Канал измерения и регулирования температуры газаСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
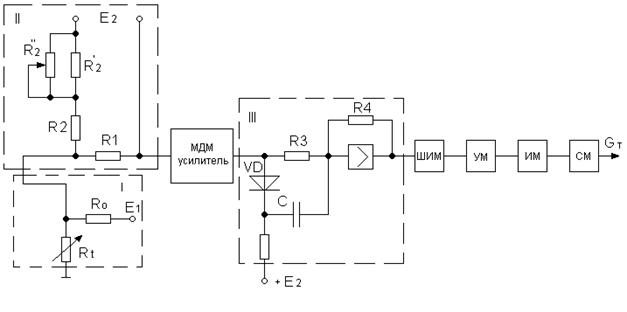
Установившиеся и неустановившиеся режимы работы двигателя ограничиваются определенной рабочей областью изменения параметров; поэтому система автоматического регулирования должна допускать лишь такие отклонения от заданной линии рабочих режимов, которые не выходили бы из допустимой области. Эта область для ТРД ограничивается максимальным числом оборотов, максимальной температурой газа, границей помпажа и границей устойчивого горения топлива в камере сгорания. Для того чтобы установить ТРД на заданный режим работы, необходимо поддерживать определенное значение числа оборотов и температуры газов перед турбиной. Возможная структурная схема ограничителя температуры газа приведена на рисунке 2.
Рис. 2. Структурная схема ограничителя температуры газа: I – компенсатор ЭДС холодного спая термопары; II – задатчик температуры ограничителя; III – нелинейный корректирующий контур; ШИМ – широтно-имупульсный модулятор; УМ – усилитель мощности; ИМ – исполнительный механизм; СМ – сервомотор. Аппаратура регулирования авиационной силовой остановки работает в, тяжелых условиях, например в диапазоне температур от –60 до +80°С. Это накладывает жесткие условия на выбор электрорадиоэлементов, режимов их работы, создает особенности при использовании датчиков первичной информации. Так, для компенсации ЭДС холодного спая термопары используется медное сопротивление Rt, устанавливаемое в место крепления холодного спая термопар. С помощью сопротивления R0 ³ Rt задается такой ток через сопротивление Rt, что в диапазоне рабочих температур изменение напряжения на Rt, за счет изменения его температурного сопротивления практически полностью компенсирует ЭДС холодного спая термопары. Сигнал с термопары сравнивается с сигналом задатчика построенного на делителе сопротивлении R1, R2, R2’, R2” систочником эталонного напряжения - стабилитроном. Погрешность всего регулятора во многом определяется погрешностью задатчика, поэтому он строится из самых стабильных элементов. Резисторы R1 и R2 также должны обладать малым температурным уходом. Полученный сигнал разности усиливается МДМ усилителем, обладающим малым дрейфом нулевого уровня. Усиленный сигнал поступает на нелинейное корректирующее звено. Необходимость применения нелинейного корректирующего контура вызвана тем, что при больших забросах температуры необходимо скомпенсировать инерционность термопары и обеспечит быстрый слив топлива, а на режимах стабилизации отключение производной позволяет обеспечить устойчивость и помехозащищенность канала регулирования температуры газа. Сформированный сигнал с помощью модулятора преобразуется в широтно-импульсные сигналы, коэффициент заполнения которых пропорционален управляющему напряжению. Работа исполнительного механизма в широтно-импульсном режиме позволяет исключить вредное влияние «плавания» нулевого положения штока исполнительного механизма на работу системы, а также произвести линеаризацию характеристик узлов «сопло – заслонка» и «сервомотор». Сигнал с ШИМ поступает на усилитель мощности, в нагрузку которого включены обмотки исполнительного механизма. От схемы усилителя мощности во многом зависят динамические характеристики исполнительной части. Как правило, усилитель мощности запитывается от источника тока со схемой форсирования, что позволяет увеличить крутизну нарастания ток в обмотках исполнительного механизма и расширить его полосу пропускания. Шток исполнительного механизма совместно с соплом, установленным на гидравлическом агрегате, образуют управляющий элемент исполнительного сервомотора.
32 Радиовысотомер малых высот Радиовысотомеры (РВ) предназначены для измерения истинной высоты полета летательного аппарата. Они относятся к классу автономных радионавигационных установок, так как не требуют для образования канала измерения дополнительного наземного оборудования. Радиовысотомеры малых высот(до 1500 м) применяют главным образом для управления ЛА в вертикальной плоскости в системах захода на посадку и автоматической посадки. Используются, в основном, РВ с изучением непрерывных частотно-модулированных колебаний. Принцип действия радиовысотомера малых высот. Упрощенное объяснение этого метода состоит в следующем, генератор УВЧ через передающую антенну излучает по направлению к земле высокочастотные колебания, модулированные по частоте специальным частотным модулятором. Кроме того, колебания генератора подаются непосредственно к балансному декодеру (так называемый прямой сигнал).
Отраженные от земли частотно-модулированные высокочастотные колебания принимаются приемной антенной радиовысотомера и поступают на вход балансного декодера с запаздыванием по отношению к прямому сигналу на время t =2 H/C, где Н- высота полета, С - скорость света. В результате смещения прямого и отраженного сигналов на входе балансного детектора образуется результирующий сигнал, представляющий собой высокочастотные колебания, модулированные не только по частоте, но и по амплитуде. Методы измерения малых высот. Частотный метод измерения высоты основан на частотной модуляции (ЧМ) излучаемых колебаний.
Рис1. Упрощенная структурная схема частотного радиовысотомера
Рис2 Структурная схема, поясняющая принцип действия широкополосного частотного радиовысотомера.
Частотные радиовысотомеры в зависимости от ширины полосы пропускания усилителя преобразованного сигнала разделяют на широкополосн. и узкополосные. Широкополосный РВ (рис. 2.) имеет полосовой усилитель ПУ, полоса пропускания которого D FП.У .>> D Fс, где D Fс — ширина спектра преобразованного сигнала. Крайние частоты Fmin и Fmax полосы пропускания определяются диапазоном измеряемых высот. В амплитудном ограничителе АО преобразованный сигнал превращается в последовательность импульсов постоянной амплитуды, которые подаются на счетчик импульсов СИ. Средняя частота следования этих импульсов равна при отсутствии помех среднеквадратической частоте сигнала. Счетчик вырабатывает напряжение, пропорциональное количеству поступивших на него импульсов, а инерционное звено ИЗ усредняет это напряжение. Обычно ограничитель вырабатывает импульсы при пересечении напряжением сигнала нулевого уровня. Поэтому счетчик измерителя частоты часто называют счетчиком числа переходов через нуль. Узкополосные РВ широко применяют в качестве прецизионных измерителей высоты, в частности, в системах автоматического захода на посадку. В узкополосных РВ полосу пропускания тракта обработки преобразованного сигнала выбирают близкой к ширине спектра преобразованного сигнала D F C и используют следящую систему, которая позволяет совмещать среднюю частоту преобразованного сигнала с частотой f0 настройки тракта. Погрешности: Первую группу погрешностей образуют методические, связанные со случайным характером принятого сигнала, изменением рассеивающих свойств земной поверхности в процессе полета, влиянием крена и тангажа ЛА, флуктуациями сигнала из-за процесса рассеяния ЭМ волн, шумами внешнего и внутреннего происхождения.
Вторая группа связана с динамическими ошибками. В радиовысотомерах они возникают из-за маневров ЛА: измерение высоты сильнопересеченного рельефа, использования РВ в системах управления самолета и других случаях. Так как измерительные устройства РВ имеют динамические характеристики соответствующего порядка, то при наличии вышеуказанных причин имеет место отставание в измерении высоты и возникает динамическая ошибка. Третью группу составляют инструментальные (аппаратурные) погрешности, связанные с прохождением сигналов через антенно- фидерные, приемно-передающие и измерительные тракты РВ, а также ошибки из-за схемных конструктивных и технологических решений конкретных блоков РВ.
|
|||||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 458; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.33.239 (0.011 с.) |

 Низкочастотный генератор ГНЧ (рис.1.)вырабатывает модулирующее напряжение, которое управляет частотой высокочастотных колебаний генерируемых передатчиком Прд. Отраженный от земной поверхности сигнал поступает на балансный смеситель БС, куда подается также часть мощности излучаемых ЧМ колебании. Частоты принимаемого и излучаемого колебаний отличаются друг от друга, так как за время tH мгновенная частота излучаемого колебания изменяется из-за модуляции частоты. Сигнал разностной частоты выделяется усилителем низкой частоты УНЧ и поступает на измеритель частоты ИЧ с которого снимается напряжение U(Н), пропорциональное высоте полета.
Низкочастотный генератор ГНЧ (рис.1.)вырабатывает модулирующее напряжение, которое управляет частотой высокочастотных колебаний генерируемых передатчиком Прд. Отраженный от земной поверхности сигнал поступает на балансный смеситель БС, куда подается также часть мощности излучаемых ЧМ колебании. Частоты принимаемого и излучаемого колебаний отличаются друг от друга, так как за время tH мгновенная частота излучаемого колебания изменяется из-за модуляции частоты. Сигнал разностной частоты выделяется усилителем низкой частоты УНЧ и поступает на измеритель частоты ИЧ с которого снимается напряжение U(Н), пропорциональное высоте полета.



