
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Структура приборного комплексаСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Под приборным комплексом понимается совокупность бортовых измерительных и вычислительных средств, служащих для восприятия, обработки, хранения и преобразования информации, необходимой для успешного выполнения полетного задания. УВИm- устройства, воспринимающие информацию о линейных и угловых координатах положения ЛА в пространстве или информацию о параметрах, характеризующих работу его силовых установок, отдельных систем и агрегатов; УОИn - устройства первичной обработки информации, поступившей от устройств, ее воспринимающих; БВС - бортовая вычислительная система; УИl - устройства индикации; УCk - устройства сопряжения бортового приборного комплекса c другими системами и комплексами.
Рис. 1. Обобщенная структурная схема приборного комплекса
Каждое устройство, воспринимающее информацию об определенном параметре, может быть связано с одним или несколькими микропроцессорами. Порядок подключения микропроцессоров и выполняемые ими операции определяются алгоритмами вычислений, задаваемыми решаемыми измерительными задачами. Устройства, воспринимающие информацию о параметрах, подключаются к микро-ЭВМ, которая производит их первичную обработку по различным алгоритмам в соответствии с решаемыми задачами. Выходные сигналы устройств обработки информации могут поступать как потребителям (экипажу через устройства индикации и другим системам и комплексам через устройства сопряжения), так и в бортовую вычислительную систему для дальнейшей обработки. Средства вычислительной техники выполняют на борту следующие функции: преобразования сигналов - как аналого-цифрового, так и цифроаналогового; кодирования информации - входной для обработки, выходной для передачи и представления потребителям; интерфейса, осуществляющего в соответствии с правилами, задаваемыми управляющей программой, связь между устройствами комплекса; комплексной обработки поступающей в вычислительную систему информации с целью получения всех выходных данных, необходимых потребителям; контроля состояния аппаратуры комплекса, диагностики ее отказов и управления функционированием всей аппаратуры. Информационные связи между устройствами комплекса описываются его топологией. Обобщенная топология бортового комплекса представлена на рис. 2. Топологическими элементами Rj, Rji, Rnl…k в этой структуре могут быть процессоры, ЦВМ, устройства сбора информации. Линии передачи информации реализуются обычными проводами или оптоволокно. Приборные комплексы могут иметь централизованную, федеративную или распределенную топологию. Типичной для централизованной топологии является структура с одной мощной ЦВМ, показанная на рис. 3.
Одна ЭВМ в этой структуре связана со многими устройствами, которые воспринимают информацию и осуществляют ее первичную обработку (ИУn), а также индикаторами (УИl), и устройствами сопряжения с другими системами (УCk). Федеративная структура предполагает, что для связи ЦВМ и процессоров между собой и для связи процессоров с устройствами, воспринимающими информацию, используются различные магистрали. Топология распределенных систем. Отличие структур этого класса состоит в том, что здесь каждый вычислитель имеет свой собственный набор внешних устройств, воспринимающих информацию и отображающих ее. Связь отдельных фрагментов такой структуры между собой может осуществляться только через вычислитель.
Рис. 3. Централизованная типология приборного комплекса
4. Измерительные сигналы и их преобразование Измерительные сигналы это сигналы, являющиеся физическими носителями измерительной информацию. К ним относим: полезные сигналы, получаемые от исследуемых, контролируемых или управляемых объектов; вредные сигналы или помехи, поступающие в измерительную систему вместе с полезными сигналами или независимо от них; помехи, возникающие внутри измерительной системы, специально генерируемые в системе или вне ее сигналы, улучшающие работу системы (модуляция, дискретизация и др.). Носителями физических сигналов используются импульсы механической, тепловой, электрической, магнитной, акустической и световой энергии и другие ее виды. Измерительные сигналы можно разделить на постоянные и переменные; неслучайные и случайные; периодические, почти периодические, импульсные, стационарные и нестационарные. На рис.1. дана одна из возможных систем классификации сигналов.
Рис. 1. Классификация сигналов
Рис. 5. Виды сигналов
Сигналы в зависимости от характера изменения во времени или пространстве делятся на непрерывные и дискретные. На том же рис.5. даны примеры дискретных (рис. 5, в) и дискретных квантованных (рис. 5, г) сигналов. Импульсным называется сигнал, величина которого ничтожно мала в любой точке временной оси, за исключением некоторой конечной области Сигналы, значения которых повторяются через постоянные интервалы времени, называются периодическими (рис.7).
Рис. 7. Периодические сигналы Особый класс составляют случайные сигналы, создаваемые случайными процессами в объектах и системах, о которых имеются неполные сведения. Случайные сигналы могут быть созданы посредством специальных генераторов. К числу основных операций преобразования относятся: квантование, дискретизация, восстановление, сравнение, функциональное изменение, фильтрация, модуляция, детектирование и запоминание. Преобразование может быть линейным и нелинейным. Преобразование непрерывного сигнала в дискретный, состоящий из множества квантов, называется квантованием по уровню. Операция выделения из спектра сигнала определенной полосы частот называется фильтрацией. Фильтрацию можно классифицировать по роду преобразованийна аналоговую и цифровую, а по расположению полос пропускания — на фильтрацию низких частот, высоких частот,полосовую и заграждающую. Устройства, осуществляющие фильтрацию, называются фильтрами. Необходимость модуляции возникает когда требуется повысить точность обработки измерительного сигнала, а также его передача на различные расстояния. Существует амплитудная (АМ), частотная (ЧМ) и фазовая (ФМ) модуляции.Выделение из модулированного сигнала составляющей, пропорциональной измеряемому сигналу, называется детектированием. Если в качестве модулируемого сигнала используется периодическая последовательность импульсов (рис. 12.), то получим импульсную модуляцию. При этом имеем амплитудную импульсную (АИМ), частотно-импульсную (ЧИМ), фазо-импульсную (ФИМ) и широтно-импульсную (ШИМ) модуляции. В измерительной технике модуляция применяется не только для более совершенной обработки измерительных сигналов, но также для фильтрации помех Посредством датчиков необходимые параметры преобразуются в электрический сигнал. В то же время выходной сигнал авиационных приборов на современных летательных аппаратах как правило имеет цифровой характер. Требуемая точность, надёжность и информативность измеренного сигнала может быть обеспечена применением высокоточных датчиков, а также посредством соответствующих видов преобразований.
Турбинные расходомеры Приборы и датчики, измеряющие расход топлива в единицу времени (расходомеры), применяются для выдерживания наиболее экономичного режима полета, отвечающего минимуму расхода горючего на километр пройденного пути (с учетом скорости полета. Принцип действия тахометрических (скоростных или турбинных) расходомеров основан на зависимости скорости вращения расположенной в трубопроводе ненагруженной тангенциальной крыльчатки (турбины) от расхода жидкости. Достоинством метода является пропорциональная зависимость скорости вращения крыльчатки от расхода жидкости. Частота вращения крыльчатки зависит не только от величины расхода, но также от вязкости жидкости (температуры), что вызывает появление погрешностей прибора. В приборах мгновенного расхода сигнал тахогенератора (напряжение или частота) служит мерой измеряемого расхода. В массовых расходомерах помимо частоты измеряют плотность ρВ качестве измерителей частоты применяют тахогенераторы переменного тока. Измерение угловой скорости осуществляется магнитоиндукционным тахометрическим узлом (рис.8).
Рис. 8. Кинематическая схема датчика расходомера Постоянный магнит 2 узла приводится во вращение крыльчаткой 1. Для уменьшения температурных погрешностей применен термомагнитный шунт 3. Герметичность датчика обеспечивается применением диамагнитного кожуха 4. При вращении магнита в чувствительном элементе 5 наводятся вихревые токи, взаимодействующие с полем магнита. Поворот чувствительного элемента (стакана) ограничивается противодействующей пружиной 6. Очевидно, угол поворота стакана пропорционален мгновенному расходу топлива. На оси стакана находится ротор сельсина-датчика 7 синхронной передачи.Сельсин-приемник помещен в указателе прибора, причем его ротор перемещает стрелку прибора в соответствии с изменением мгновенного расхода топлива. Схема сельсинной передачи представлена на рис.9. Обмотки возбуждения 1 и 1’ и обмотки синхронизации 2 и 2’ размещены на статоре сельсина-датчика (С–Д) и сельсина-приемника (С–П).
мгновенного расхода Цилиндрический ротор сельсина состоит из двух пакетов листовой электротехнической стали, впрессованных в пластмассу. Индуктируемые в синхронизирующих обмотках 2 и 2’ эдс зависят от углового положения роторов. При несинхронном положении роторов возникает синхронизирующий момент, устанавливающий ротор сельсина-приемника в положение, синхронное с ротором датчика. Шкала мгновенного расхода градуируется в кг/ч. Погрешности Представленные расходомеры являются приборами косвенного метода измерения, поэтому им свойственны методические погрешности. Погрешности при замене сорта топлива могут достигать 5 – 6 %. Они учитываются поправочными графиками. Методическая погрешность из-за изменения плотности при замене сорта топлива в расходомерах. Погрешность измерения может также возникать из-за еравномерного распределения скорости течения топлива по поперечному сечению датчика расхода. Инструментальные погрешности расходомеров складываются из погрешностей преобразователя, измерительной схемы и указателя. Температурные инструментальные погрешности в расходомерах мгновенного расхода компенсируются термомагнитным шунтом.
Типы топливомеров Приборы, измеряющие объемное или весовое количество топлива в баках, называются топливомерами. Они позволяют экипажу самолета в любой момент полета определить, сколько топлива имеется в баках, и оценить время, в течение которого можно продолжать полет. Подобные приборы служат также для измерения запаса масла (масломеры). С помощью топливомеров определяют суммарный запас топлива во всех баках и количество топлива в каждом из них в отдельности. Необходимо знать, как распределено топливо между баками, для того чтобы определить правильную последовательность расходования топлива из баков во избежание недопустимого смещения центра масс самолета. Переключением баков управляют автоматические устройства топливомеров. Классифицируя топливомеры по принципу действия чувствительного элемента, можно отметить следующие типы: 1) поплавковые, основанные на измерении уровня (объема) топлива с помощью плавающего на поверхности поплавка; 2) манометрические, основанные на измерении давления (веса) столба топлива с помощью манометра; 3) емкостные, основанные на измерении уровня (объема) топлива с помощью специального конденсатора, емкость которого связана функционально с уровнем топлива в баке. Топливомеры должны быть дистанционными. Этому требованию удовлетворяют электрические топливомеры. Механические топливомеры, не являясь дистанционными, почти не применяются в авиации. Поплавковые топливомеры Измерение запаса топлива или масла в баке летательного аппарата с помощью электрического рычажно-поплавкового топливомера (масломера) основано на принципе преобразования неэлектрической величины – переменной высоты уровня жидкости в электрическую величину – переменное активное сопротивление, меняющееся в соответствии с изменением уровня жидкости. Электрические рычажно-поплавковые топливомеры предназначены не только для измерения количества топлива, но и для управления централизованной автоматической заправкой и выработкой топлива из топливных баков, а также для сигнализации аварийного остатка топлива в баках летательного аппарата. Принцип действия емкостного топливомера основан на зависимости величины емкости специального конденсатора от уровня топлива в баке. Существенным преимуществом емкостных топливомеров по сравнению с поплавковыми является отсутствие в датчике подвижных частей, кроме того, в этих приборах погрешности при кренах и ускорениях самолета меньше, чем в поплавковых. Емкостные топливомеры применяются для измерения количества всех видов топлива, но оказываются почти незаменимыми в случае измерения количества химически активных жидкостей, применяемых в качестве горючих компонентов в жидкостно-реактивных двигателях. Погрешности электрических поплавковых топливомеров складываются из следующих составляющих: – погрешностей, являющихся следствием продольных и поперечных кренов и ускорений самолета; – погрешностей, возникающих при неточной установке топливных баков и отклонений их размеров от полученных при расчете и тарировке; – температурных погрешностей, вызванных изменением температуры топлива в баке и сменой сорта топлива; – температурных погрешностей, появляющихся из-за изменения магнитных характеристик и электрических параметров при изменении температуры окружающей среды; – погрешностей, возникающих из-за изменения напряжения источника питания. Погрешность из-за неточного совпадения профиля датчика с характеристикой бака. Кроме того, емкость зависит от углов крена g и тангажа u, от ускорения j и диэлектрической постоянной топлива e1, т. е. С=F1(V, u, g, j, e1 ) C =F2 (G, V, u, g, j, e1, r ), r — плотность топлива. Инструментальные погрешности емкостного топливомера вызываются главным образом влиянием температуры на параметры элементов мостовой схемы (конденсаторов, сопротивлений), они малы.
Емкостные топливомеры Принцип действия емкостного топливомера основан на зависимости величины емкости специального конденсатора от уровня топлива в баке. Чувствительный элемент емкостного топливомера (рис. 3) представляет собой цилиндрический конденсатор с внутренним электродом 1,внешним 2 и изоляционным слоем 3. Между изоляционным слоем и внешним электродом находится слой жидкости (топливо, кислота), уровень которой необходимо измерить. Если уровень жидкости в баке изменяется, то будет изменяться и емкость конденсатора вследствие того, что диэлектрические постоянные жидкости и воздуха различны.
1 - внутренний электрод; 2 - внешний электрод; 3 - изоляционный слой. Основные соотношения. Для вывода зависимости между уровнем топлива в баке и емкостью датчика введем следующие обозначения (см. рис. 3): e1, e2, e3— диэлектрические постоянные жидкости, материала изолятора и смеси паров жидкости и воздуха соответственно; R 1, R 2, R 3— радиусы внутреннего электрода, изолятора и внешнего электрода; х — уровень жидкости; h —полная высота датчика. Если пренебречь концевым эффектом, то можно принять, что емкость нижней части цилиндрического конденсатора будет
Суммируя емкости Сх и Ch, получим полную емкость конденсатора:
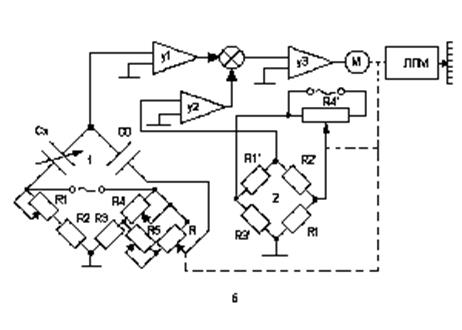
. Рис.11. Принципиальная электрическая схема емкостного измерительного моста
Измерительная часть электроемкостного топливомера представляет собой самоуравновешивающийся мост переменного тока, одним плечом которого является емкость датчика Сх. На рис. 11 представлена принципиальная электрическая схема измерения количества топлива, состоящая из основного измерительного моста 1 и дополнительного (компенсационного) 2. Мосты питаются переменным током напряжением 115 В, 400 Гц. В плечи моста 1 включены емкости Сх, С о и сопротивления R l, R 2, R 3, R 4, R5, R. При изменениях емкости датчика Сх нарушается равновесие моста и на входе усилителя У1 появляется сигнал, который через сумматор поступает на усилитель УЗ, а затем на двигатель отработки М, который перемещает через лентопротяжный механизм ленту показывающего прибора. Показывающий прибор топливомера может быть выполнен и с круглой шкалой, тогда двигатель отрабатывает через редуктор стрелку прибора. При перемещении стрелки (или ленты в ЛПМ) одновременно отрабатывается щетка потенциометра R, уравновешивающего мост. Переменные резисторы R 1 и R 5 служат для регулировки моста при пустом и полностью заправленном баке (регулировка «нуля» и «максимума»). Погрешности: 1.методические погрешности- а)Под действием ускорений и эволюции самолета топливо в баках перераспределяется, что приводит к изменению емкости Сх датчика. в) Погрешность из-за неточного совпадения профиля датчика с характеристикой бака. Кроме того, емкость зависит от углов крена g и тангажа u, от ускорения j и диэлектрической постоянной топлива e1, т. е. С=F1(V, u, g, j, e1 ) C =F2 (G, V, u, g, j, e1, r ), r — плотность топлива. Инструментальные погрешности емкостного топливомера вызываются главным образом влиянием температуры на параметры элементов мостовой схемы (конденсаторов, сопротивлений), они малы.
|
|||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 878; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.217.241.235 (0.009 с.) |


 Рис. 2. Обобщенная типология приборного комплекса
Рис. 2. Обобщенная типология приборного комплекса
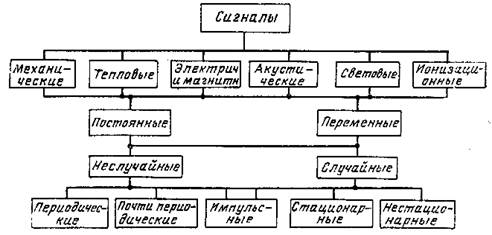



 Рис. 9. Схема сельсинной передачи тахометрического расходомера
Рис. 9. Схема сельсинной передачи тахометрического расходомера Рис. 3 Схема чувствительного элемента емкостного топливомера:
Рис. 3 Схема чувствительного элемента емкостного топливомера: Подобно этому емкость верхней части конденсатора найдем из соотношения
Подобно этому емкость верхней части конденсатора найдем из соотношения
 Из этого выражения следует, что емкость конденсатора является линейной функцией уровня жидкости х. Таким образом, измерение уровня жидкости можно свести к измерению емкости конденсатора С. Чувствительность емкостного датчика определяется выражением
Из этого выражения следует, что емкость конденсатора является линейной функцией уровня жидкости х. Таким образом, измерение уровня жидкости можно свести к измерению емкости конденсатора С. Чувствительность емкостного датчика определяется выражением наибольшая чувствительность будет в том случае, когда R 2/ R 1 стремится к 1, т. е. когда слой изоляции отсутствует. При этом получим:
наибольшая чувствительность будет в том случае, когда R 2/ R 1 стремится к 1, т. е. когда слой изоляции отсутствует. При этом получим:
 . Емкостные топливомеры, выполняют следующие функции:– измеряют количество топлива в группах баков и суммарное количество топлива на самолете;– управляют выработкой топлива по заданной программе;– осуществляют управление заправкой топлива; – сигнализируют о выработке топлива из определенной группы баков и об остатке топлива на определенную продолжительность полета. В основу работы измерительной части топливомера положен электроемкостный метод измерения запаса топлива.
. Емкостные топливомеры, выполняют следующие функции:– измеряют количество топлива в группах баков и суммарное количество топлива на самолете;– управляют выработкой топлива по заданной программе;– осуществляют управление заправкой топлива; – сигнализируют о выработке топлива из определенной группы баков и об остатке топлива на определенную продолжительность полета. В основу работы измерительной части топливомера положен электроемкостный метод измерения запаса топлива.


