
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Спутниковые геодезические измеренияСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
ИНЖЕНЕРНАЯ ГЕОДЕЗИЯ Часть II Учебное пособие Под редакцией доктора техн. наук В. А. Коугия
Санкт-Петербург 2008 УДК 528.48 И62 Рецензенты: начальник кафедры высшей геодезии Военного топографического института Военно-космической академии им. А. Ф. Можайского В. Л. Романов; ректор Института геодезии и космонавтики Военно-космической академии им. А. Ф. Можайского доктор технических наук, профессор Е. П. Тарелкин
ISBN 978-5-7641-0192-7 Приведены сведения о спутниковых навигационных системах и их использовании в геодезии. Изложена технология теодолитной, тахеометрической и мензульной съемок местности, описаны фототеодолитная и сканерная съемки. Изложены методы расчетов и измерений при вынесении проектов на местность. Рассмотрены геодезические работы при изысканиях и строительстве железных дорог, при текущем содержании пути, основные методы геодезических работ при строительстве мостов, зданий, при строительстве и съемке подземных коммуникаций. Предназначено для студентов, обучающихся по железнодорожным и строительным специальностям. УДК 528.48 Пособие разработали: Е. С. Богомолова – разд. 11; канд. техн. наук М. Я. Брынь – разд. 10; 12; д-р техн. наук В. А. Коугия – разд. 13; 14; 15; канд. техн. наук О. Н. Малковский – разд. 18; канд. техн. наук В. И. Полетаев – разд. 16; канд. техн. наук О. П. Сергеев – разд. 17; канд. техн. наук Е. Г. Толстов – разд. 19.
ISBN 978-5-7641-0192-7 © Петербургский государственный университет путей сообщения, 2008
Малковский О. Н., Полетаев В. И., Сергеев О. П., Толстов Е. Г., 2008
СПУТНИКОВЫЕ ГЕОДЕЗИЧЕСКИЕ ИЗМЕРЕНИЯ Общие сведения о спутниковых навигационных системах Спутниковые геодезические измерения выполняют с помощью аппаратуры, работающей по сигналам спутников навигационных систем GPS (Global Positioning System, США) и ГЛОНАСС (Глобальная навигационная спутниковая система, Россия). В Европейском союзе ведутся работы по созданию еще одной системы - GNSS-2 "GALILEO".
Краткие сведения об этих системах приведены в табл. 10.1. Таблица 10.1 Кодовые и фазовые измерения Кодовые измерения. В приемнике спутниковых сигналов, как и на спутнике, есть датчик частоты и времени, в нем также вырабатываются частоты L 1 и L 2 (в одночастотном приемнике - только L 1). Частота L 1 модулируется копиями кодов С / А и Р, частота L 2 - только кодом Р. Интервал времени между появлением на приемнике собственного кода и аналогичного кода, пришедшего от спутника, измеряют. Если бы часы приемника были точно синхронизированы с часами спутника, то формирование кодов на спутнике и в приемнике происходило бы одновременно. В этом случае измеренный интервал времени между появлениями на приемнике собственного кода и кода, пришедшего от спутника, был бы равен времени прохождения сигнала от спутника до приемника, что позволило бы вычислить расстояние до спутника. Однако показания часов спутника и приемника расходятся на некоторую величину, равную δ s – δ p, где δ s – ошибка часов спутника, δ p – ошибка часов приемника. Поэтому измеренное расстояние R существенно отличается от верного и носит название – псевдорасстояние. Допустим, что ионо- и тропосферная задержки сигнала учтены путем введения соответствующих поправок. Тогда измеренное псевдорасстояние
где Xs (t), Ys (t), Zs (t) – координаты спутника в эпоху t; Xp, Yp, Zp – определяемые координаты приемника; c – скорость света. Информация о часах спутника передается в составе навигационного сообщения, что дает возможность вычислить ошибку часов спутника на эпоху t и учесть ее. Таким образом, для псевдорасстояния
Неизвестными величинами здесь являются Xp, Yp, Zp,δ p (t). Для определения четырех неизвестных необходимо иметь не менее четырех уравнений, то есть в одну эпоху необходимо измерить псевдорасстояния не менее, чем до четырех спутников. координаты определяются по результатам кодовых измерений с точностью около 3 м. Для повышения точности пользуются дифференциальным методом. На контрольном пункте с известными координатами устанавливают приемник спутниковых сигналов и, определив его координаты по спутникам, вычисляют расстояния до спутников. Сравнив эти расстояния с вычисленными по известным координатам, определяют поправки и по радио сообщают их потребителям. Поправками исправляют псевдорасстояния, измеряемые потребителями, при этом ошибки определения места относительно контрольного пункта не превышают 1 м.
Кодовые измерения применяются при решении задач навигации. В геодезических работах кодовые измерения играют вспомогательную роль – служат для определения приближенных координат пунктов сети. Фазовые измерения. Точные геодезические измерения выполняют на несущих частотах L 1 и L 2 (в одночастотных приемниках – только на частоте L 1). При этом измеряют разности фаз между колебаниями, принятыми от спутника, и колебаниями такой же частоты, выработанными в приемнике. Обозначим:
Для указанных фаз справедливы уравнения:
Здесь r – расстояние от спутника до приемника; с – скорость света;
Вычитая из первого фазового уравнения второе, получаем фазовое уравнение измеряемой разности фаз
Перепишем его так:
Умножим уравнение на длину волны
Представим разность фаз
где N – целое число периодов, а F – дробь. Подставляя выражение (10.3) в (10.2), напишем:
Расстояние между спутником и приемником непрерывно изменяется, отчего изменяется и сдвиг по фазе В приемнике спутниковых сигналов предусмотрено измерение непрерывно изменяющейся разности фаз F и подсчет числа переходов ее через нуль, изменяющих целое число волн в расстоянии. Это число прибавляется к измеряемой величине F, отчего суммарный сдвиг по фазе оказывается неправильной дробью, а неизвестное число N остается постоянным для всех расстояний от пункта p до спутника s. Определение целого числа N называется разрешением его неоднозначности. Учитывая изложенное, напишем уравнение измеренного сдвига по фазе сигнала, принятого от спутника s на пункте p в эпоху t:
где
Для ns спутников, nt эпох и одной точки p число измерений, а значит, и число уравнений (10.5) будет равно nsnt. Разности фаз измеряют с высокой точностью, соответствующей долям миллиметра. Однако вычислить решением системы уравнений (10.5), составленных по результатам фазовых измерений, координаты приемника с указанной точностью не удается из-за ошибок орбиты, влияния ионосферы и других причин. Точность фазовых измерений реализуют, применяя метод относительного определения положения пунктов. Результаты одновременных наблюдений одного и того же спутника в двух пунктах содержат значительные, но общие, близкие по величине погрешности. Поэтому разности результатов измерений от них практически свободны и позволяют с высокой точностью определять разности координат X, Y, Z двух пунктов, то есть трехмерный вектор D X, D Y, D Z, их соединяющий. Следовательно, зная координаты X, Y, Z одного пункта, можем, определив разности координат D X, D Y, D Z до другого, вычислить и его координаты.
Фазовые измерения в геодезических работах являются основными, обеспечивая возможность построения геодезических сетей высокой точности. Тахеометрическая съемка Тахеометрической называют топографическую съемку местности, выполняемую с помощью тахеометров. Съемке подлежат и ситуация, и рельеф. Тахеометром называют прибор, сочетающий теодолит – для измерения углов и дальномер – для измерения расстояний. Простейшим тахеометром является любой теодолит, снабженный нитяным дальномером. Тахеометрическую съемку применяют при съемке в крупных масштабах небольших участков местности, особенно незастроенных или малозастроенных. Ее применяют также при съемке трасс существующих и проектируемых линейных сооружений (автомобильных и железных дорог, ЛЭП, трубопроводов и т. п.). Съемочной основой тахеометрической съемки чаще всего служат теодолитно-высотные ходы – теодолитные ходы, в которых измеряют ещё и вертикальные углы, что позволяет методом тригонометрического нивелирования вычислить высоты пунктов хода. Другой вид съемочной основы – теодолитно-нивелирные ходы – теодолитные ходы, в которых высоты пунктов определяют геометрическим нивелированием, ходы которого прокладывают по сторонам теодолитных ходов. Применяют также тахеометрические ходы, в которых длины линий измеряют нитяным дальномером, а превышения - методом тригонометрического нивелирования. Съемку ситуации и рельефа выполняют тахеометром, в основном способом полярных координат. Для выполнения съемки тахеометр устанавливают на точке съемочной сети (на рис. 11.3, точка А), центрируют и горизонтируют. Измеряют высоту прибора k над центром пункта. Ориентируют горизонтальный круг, то есть устанавливают его в такое положение, чтобы при трубе, направленной по стороне хода AB, отсчет по горизонтальному кругу был равен 0° 00¢. Определяют место нуля М0 вертикального круга. Реечник устанавливает рейку на пикете 1 (рис. 11.3). Наблюдатель наводит трубу прибора на рейку, читает по рейке высоту точки наведения l и берет отсчеты: по нитяному дальномеру (расстояние s 1), по горизонтальному кругу (угол b1), по вертикальному кругу (отсчет Л (лево) или П (право)).
Рис. 11.3 Абрис тахеометрической съемки Помощник наблюдателя записывает результаты измерений в полевой журнал и составляет схематический чертеж снимаемого участка местности - абрис (см. рис. 11.3).
Реечник переносит рейку на следующие пикеты (2, 3, …), а наблюдатель вновь выполняет наведения и отсчеты. Обработка результатов измерений, полученных теодолитом типа Т-30, выполняется по формулам: - вычисление углов наклона v = Л - М0 (или v = М0 - П); - вычисление горизонтальных расстояний d = s ·cos2 ν, - вычисление превышений h = ½ s ·sin(2 ν) + k – l или h = d · tg ν + k – l, - вычисление высоты съемочных пикетов Н п = H ст + h, где H ст – высота точки стояния прибора. Составление плана местности включает: – вычисление координат x, y и высот Н точек хода; – разбивку на планшете сетки прямоугольных координат; – нанесение на план точек хода по координатам x, y; – нанесение точек и рисовку контуров, используя записи в журнале и абрис; – рисовку горизонталей с заданной высотой сечения рельефа с использованием вычисленных высот точек и абриса; – оформление плана в соответствии с указаниями руководства "Условные знаки". Современные технологии Использование электронных тахеометров (см. ч. I, разд. 8), регистрирующих результаты измерений на магнитные носители, и программных продуктов при обработке результатов измерений позволяет автоматизировать процесс составления плана. При съемке местности электронный тахеометр устанавливают на точке съемочной основы, вводят в память координаты и высоту точки стояния, высоту прибора и отражателя, температуру воздуха и атмосферное давление. Наведя трубу на соседнюю точку хода, устанавливают отсчет по горизонтальному кругу, равный 0° 00¢. Реечник ставит веху с отражателем поочередно на съемочных пикетах. Тахеометром измеряют горизонтальный и вертикальный углы и расстояние до отражателя. Горизонтальный угол и вычисленные по результатам измерений горизонтальное расстояние d, превышение h и высота пикета Н п высвечиваются на табло и регистрируются в памяти прибора. Предусмотрена возможность высвечивания и регистрации и иных данных. Собранную информацию экспортируют в память компьютера и обрабатывают, используя такие пакеты программ, как "CREDO", "Топаз" и др. При этом получают электронную версию топографического плана. При необходимости ее можно распечатать на плоттере и получить план на бумаге. Особенности крупномасштабной съемки железнодорожных станций и узлов Съемка железнодорожных станций и узлов выполняется в соответствии с ведомственными строительными нормами[1] в масштабе 1:500 или 1:1000. Станции IV–V классов снимают работники дистанции пути, станции II–III классов – геодезическая группа отделения дороги, станции I класса и внеклассные - специализированные организации. Планы станций можно составлять в государственной системе координат, но чаще применяют местную (станционную) систему, в которой за начало координат принимают точку пересечения оси пассажирского здания (ось x) с базисным ходом, проложенным вдоль главного пути (ось y). Система высот – обычно Балтийская. Съемочной основой при съемке станций служат точки одного или нескольких базисных теодолитных ходов и опирающихся на них съемочных теодолитных ходов. Базисные ходы прокладывают вдоль главного пути или парка путей, съемочные – в местах, удобных для геодезических измерений и съемки путевого развития и пристанционной территории.
Базисные ходы привязывают в плане к пунктам геодезической сети ближайшего города (поселка), по высоте – не менее чем к двум реперам государственной нивелирной сети. Точки ходов закрепляют как постоянными знаками, так и временными (дюбелями, деревянными колышками). Постоянными знаками должно быть закреплено не менее трех точек базисных ходов на каждый парк и не менее двух точек на 1 км главного пути. Измерение углов и расстояний в ходах выполняют электронными тахеометрами или теодолитами Т2 или Т5 и светодальномерами, применяя трехштативную систему. Углы и длины линий измеряют двумя приемами. Невязки в ходах не должны превышать допусков, приведенных в табл. 11.1. Высоты точек ходов определяют, прокладывая ходы технического или тригонометрического нивелирования.
Таблица 11.1 Допустимые невязки в ходах
Съемку местных предметов выполняют в основном электронными тахеометрами, используя способы полярных и прямоугольных координат, реже - угловой засечки. Точность съемки - 0,2 мм в масштабе плана, но для элементов станционной ситуации и путевого развития она не должна превышать: вдоль путей – 6 см, поперек путей – 2 см. В ходе съемки определяют координаты элементов путевого развития, углов пассажирского здания, локомотивного и вагонного депо, постов централизации, служебных и технических зданий, расположенных между путями или вблизи них, наружных граней опор искусственных сооружений, прожекторных мачт, мачт ЛЭП, высоких и низких платформ. На стрелочных переводах выполняют их обмер. Определяют координаты центра стрелочного перевода, марку крестовины, тип рельсов, род балласта, способ управления и освещения. При съемке производственных, служебно-технических и других зданий и сооружений определяют координаты не менее двух углов и выполняют обмер наружного периметра. Регистрируют наименование сооружения, состояние, принадлежность, материал стен, фундамента, кровли. Геометрию станционных путей(прямые вставки, кривые, изломы) определяют по характерным точкам стрелочных переводов и точкам на осях путей через 40 м для планов масштаба 1:1000 и через 20 м для 1:500. На каждом пикете измеряют междупутные расстояния и геометрическим нивелированием определяют отметки головок рельсов. План составляют на листах малодеформируемого пластика (лавсана). При необходимости на план наносят углы съемочных планшетов и сетку координат. На плане показывают все элементы ситуации, в том числе - путевое развитие, искусственные сооружения, устройства наземных и подземных коммуникаций, здания, сооружения и пр. В пределах путевого развития железнодорожной станции, насыпей и выемок горизонтали не проводят. Планы железнодорожных станций и узлов обновляют раз в 10 лет. Мензульная съемка Мензульная съемка – топографическая съемка местности, выполняемая с помощью мензулы и кипрегеля. Применяется при съемке в крупных масштабах небольших участков местности. Комплектприборов для мензульной съемки включает мензулу, кипрегель, мензульную рейку, центрировочную вилку с нитяным отвесом и ориентир-буссоль. Мензула (рис. 11.4) состоит из штатива, подставки и мензульной доски.

Рис. 11.4 Мензула и кипрегель: 1 – штатив; 2 – подставка; 3 – мензульная доска; 4 – линейка кипрегеля; 5 – стойка; 6 – зрительная труба; 7 – уровень при вертикальном круге кипрегеля; 8 – уровень при линейке; 9 – центрировочная вилка; 10 – отвес Кипрегель - прибор, предназначенный для прочерчивания направлений на планшете, определения превышений и расстояний. В настоящее время пользуются номограммным кипрегелемКН. В поле зрения трубы кипрегеля КН видны линии номограммы, которые при трубе, наведенной на рейку, позволяют отсчитать горизонтальное расстояние до рейки и превышение (см. рис. 11.6). Подготовительные работы включают создание съемочной сети и подготовку планшета.
Съемочную сеть создают, прокладывая на участке съемки теодолитно-высотные или теодолитно-нивелирные ходы. При необходимости для сгущения сети определяют положение отдельных точек засечками, а в ходе съемки и графическими способами. Для создания планшета используют лист пластика (лавсана) или бумаги, наклеенной на лист алюминия. На планшете с помощью линейки Дробышева вычерчивают координатную сетку, наносят по координатам пункты съемочной сети и подписывают их высоты. Планшет крепят на мензульной доске. Установка мензулы на съемочной точке. Мензулу устанавливают на пункте съемочной сети и приводят ее в рабочее положение, выполняя следующие действия. Мензулу центрируют, т. е. устанавливают в такое положение, чтобы изображение пункта сети на планшете было расположено на одной отвесной линии с центром пункта на местности (например, колышком). Центрирование выполняют с помощью центрировочной вилки 9 (см. рис. 11.4). Мензулу ориентируют – поворачивают планшет так, чтобы направления на нем совпадали с соответствующими направлениями на местности. Так, для ориентирования планшета на пункте съемочной сети A (рис. 11.5) линейку кипрегеля прикладывают к линии ab, где a и b - изображения на планшете пунктов A и B. Затем поворачивают мензульную доску с планшетом так, чтобы веха, установленная на точке B, была видна в трубу кипрегеля в центре сетки нитей. Ориентирование проверяют, приложив линейку кипрегеля к изображению ac направления на другой пункт C. В необжитых районах разрешается ориентировать мензулу по магнитному азимуту, используя ориентир-буссоль.
Рис. 11.5 Ориентирование мензульного планшета: A, B, C – закрепленные на местности точки; a, b, c – их изображения на планшете Мензулу горизонтируют, т. е. приводят плоскость планшета в горизонтальное положение. Для этого устанавливают линейку кипрегеля по направлению двух подъемных винтов подставки и, действуя ими, приводят пузырек уровня при линейке в нуль-пункт. Переставляют кипрегель, повернув на 90°, и третьим подъемным винтом приводят пузырек уровня в нуль-пункт. Измеряют высоту прибора над центром пункта и устанавливают нуль мензульной рейки на высоте прибора. Определяют место нуля вертикального круга. Съемка ситуации и рельефа. Рейку устанавливают на точках (пикетах), расположенных в характерных местах контуров ситуации и рельефа. Приложив линейку кипрегеля к изображению съемочной точки (на рис. 11.5 это точка a), наводят трубу на рейку и по номограммам кипрегеля отсчитывают горизонтальное расстояние d и превышение h. Вычисляют отметку пикета H п = H ст + h, где H ст – отметка съемочной точки, то есть точки, на которой установлен кипрегель. Результаты измерений и вычислений записывают в журнал.
Рис. 11.6 Поле зрения трубы кипрегеля КН: отсчет горизонтального расстояния d = 14,7 м; отсчет превышения h = +0,55 м Горизонтальное расстояние d в масштабе составляемого плана откладывают вдоль скошенного края линейки кипрегеля и на планшете накалывают точку – изображение пикета. Рядом подписывают ее высоту H. Одновременно с нанесением пикетов на планшете рисуют контуры местных предметов и, ориентируясь на отметки пикетов, проводят горизонтали. Достоинством мензульной съемки является минимальный объем камеральных работ – план составляется в поле. Работа в полевых условиях позволяет сопоставить составляемый план с натурой и добиться наиболее полного соответствия плана и местности. С другой стороны, мензульная съемка не поддается автоматизации и очень зависит от погодных условий. АЭРОКОСМИЧЕСКИЕ СЪЕМКИ Дешифрирование снимков Полученные при аэрокосмической съемке снимки надо дешифрировать, то есть опознать изображенные на них объекты и определить их количественные и качественные характеристики. Дешифрирование различают топографическое и тематическое. Цель топографического дешифрирования - получение информации о местности, необходимой для составления топографических карт и планов, тематического – получение специальной информации (например, экологической). Дешифрирование снимков бывает камеральное и полевое. Камеральное дешифрирование выполняется в стационарных условиях путем анализа изображений на снимках и сопоставления их с имеющимися эталонами. При этом используют прямые и косвенные дешифровочные признаки. Первые описывают изображение самого объекта (форму, размер, тон, цвет и др.), вторые дают информацию о не изобразившемся на снимке объекте (или не дешифрируемом по прямым признакам) на основе анализа его взаимосвязей с другими объектами. Часто невозможно по снимку получить достаточные характеристики объектов, например, количество проводов на столбах линии связи, скорость течения реки, отличить луг от болота и др. Тогда камеральное дешифрирование дополняется более дорогим – полевым дешифрированием. При полевом дешифрировании специалист, обходя местность, непосредственно сравнивает изображения на снимке с объектами и устанавливает их характеристики. Искажения снимков Изображение местности на снимке имеет искажения, основные из которых обусловлены непостоянством высоты фотографирования, рельефом местности, наклоном снимка, кривизной земной поверхности. Изменение высоты фотографирования вызывает изменение масштаба аэроснимков (см. (12.1)).
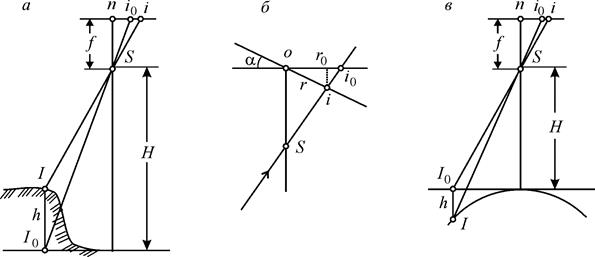
Рис. 12.3 Смещения точек на снимке, вызванные: а - рельефом; б - наклоном снимка; в - кривизной уровенной поверхности Земли Рельеф местности вызывает смещения i 0 i = d h (рис. 12.3, а) изображений точек на снимке, выражаемые формулой
где r – расстояние до точки надира n (пересечения снимка отвесной линией, проходящей через центр проекции); h – превышение точки I над точкой H – высота фотографирования. На космических снимках эти искажения незначительны и учитывают их только в высокогорных районах. Наклон снимка на угол a вызывает смещения точек относительно соответствующих точек горизонтального снимка. Изменение расстояния от центра снимка до точки в направлении наклона равно da = r a - r 0, где r 0 – расстояние на горизонтальном снимке, а r a – на наклонном. Из рис. 12.3, б видно, что
Следовательно, изменение расстояния равно:
Влияние кривизны Земли на положение точек на снимке аналогично влиянию рельефа (рис. 12.3, в). Искажения снимков, полученных сканером, кроме названных причин, вызваны еще тем, что изображение сканерного снимка по направлению полета и направлению сканирования строится в различных проекциях: в направлении полета – в ортогональной проекции, в перпендикулярном направлении – в перспективной проекции. В результате круг на плоской местности изображается на сканерном снимке неправильным овалом, прямая – кривой, квадрат - прямоугольником. В результате искажений аэрокосмические снимки имеют разный масштаб, причем неодинаковый в разных частях снимка. Трансформирование снимков Трансформирование аэрофотоснимков – это преобразование плановых или перспективных снимков в горизонтальные снимки заданного масштаба. Трансформирование различают фотомеханическое и компьютерное. Фотомеханическое трансформирование выполняется на фототрансформаторах (рис. 12.4). Для трансформирования должны быть известны координаты четырех изображенных на снимке опорных точек. Планшет с нанесенными на него опорными точками помещают на экран 1, проецируют на него негатив снимка, заложенный в кассету 3 и, изменяя масштаб изображения и поворачивая экран и негатив, добиваются совмещения опорных точек на планшете с соответствующими точками проекции негатива. Полученное на экране трансформированное изображение фиксируют на фотобумаге.

Рис. 12.4 Фототрансформатор Seg-5 (ФРГ): 1 – экран; 2 – объектив; 3 – кассета; 4 – осветительное устройство Однако при таком трансформировании не устраняются искажения, обусловленные рельефом местности, которые для горных районов весьма существенны. Такие искажения устраняют, трансформируя снимок по зонам, имеющим разную высоту, или с помощью щелевых трансформаторов. Для компьютерного трансформирования аэрофотоснимок преобразуют в цифровую форму, после чего преобразования выполняют по стандартным компьютерным программам. По компьютерным программам выполняется и трансформирование сканерных снимков. 12.5 Составление фотопланов и фотосхем Фотоплан монтируют из трансформированных аэроснимков. Основой фотоплана служит бумага, наклеенная на лист алюминия или картона. На основу наносят координатную сетку и по их координатам - опорные точки. На трансформированных снимках опорные точки прокалывают пуансоном, после чего, совмещая отверстия на снимках с опорными точками на основе, середину снимков приклеивают к основе. Наклеив два соседних снимка, разрезают их по середине перекрытия и подклеивают края на стыке снимков. Покрыв снимками всю площадь, получают единое фотографическое изображение местности, соответствующее по точности топографическим планам того же масштаба. Обычно на фотоплан наносят координатную сетку и подписывают названия населенных пунктов, рек и других объектов. Фотосхему монтируют без использования опорных точек. Смежные снимки совмещают методом "мигания". На снимок, закрепленный на основе, накладывают смежный снимок и быстрыми отгибаниями его в зоне перекрытия совмещают контуры снимков. Закрепив середину смежного снимка, оба снимка разрезают по середине перекрытия. Продолжая, получают фотографическое изображение местности – фотосхему, менее точную, но требующую меньше времени для ее составления. Можно составлять фотосхемы и из нетрансформированных аэроснимков. 12.6 Составление по снимкам топографических планов Планы местности по снимкам составляют, применяя стереофотограмметрический метод, заключающийся в совместной обработке пар перекрывающихся аэроснимков, полученных фотографированием местности из двух разных точек. Два снимка одного участка местности, полученные фотографированием из разных точек, называют стереопарой. Если выполнить взаимное ориентирование двух смежных снимков, то есть установить их в то же взаимное положение, которое они занимали в момент съемки, то пересечения лучей, проведенных через центры проектирования от одноименных точек на снимках, образуют пространственную модель местности. Масштаб такой модели равен отношению расстояния между центрами снимков к расстоянию между центрами проектирования - базису фотографирования. Выполнив внешнее ориентирование построенной модели, то есть повернув ее и изменив масштаб таким образом, чтобы координаты и высоты опорных точек модели стали равны известным из наземных геодезических измерений плановым координатам и высотам, выраженным в заданном масштабе, получают модель, по которой можно определять координаты и высоты всех других точек местности. Взаимное и внешнее ориентирование снимков и последующие измерения на модели местности выполняют, используя стереофотограмметрические приборы. Рассмотрим идеальную стереопару (рис. 12.5), в которой оба снимка и базис фотографирования B горизонтальны. Локальные плоские координаты ХC, YC любой точки C можно вычислить по измеренным координатам
где H – высота фотографирования; f – фокусное расстояние аэрофотоаппарата. За начало локальных координат принята проекция O 1 точки S 1 на исходную уровенную поверхность. Превышения между точками местности вычисляют по разностям их продольных параллаксов. Продольным параллаксом pc точки c называется разность абсцисс ее изображений на левом и правом снимках стереопары: pc = Аналогично для точки A: pa = Из рис. 12.5 видно, что
Рис. 12.5 Идеальная стереопара Аналогично для точки A:
Вычитая (12.3) из (12.2), после преобразований получим:
где D p = pa - pc - разность продольных параллаксов; b = pc – базис фотографирования, выраженный в масштабе снимка. Измерив разности продольных параллаксов D p между изображениями характерных точек местности и опорных точек, высоты которых известны, вычисляют превышения, а затем и высоты определяемых характерных точек. Обработку стереопар выполняют с помощью цифровых фотограмметрических станций (рис. 12.6), представляющих собой программно-аппаратные комплексы (компьютер, стереоочки, фотограмметрический сканер, программное обеспечение). В ходе обработки выполняется сканирование фотоснимков, их ввод в цифровой форме в память компьютера, взаимное и внешнее ориентирование, визуализация стереопар на экране дисплея. Опе
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-15; просмотров: 906; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.143.246.245 (0.02 с.) |

 © Богомолова Е. С., Брынь М. Я., Коугия В. А.,
© Богомолова Е. С., Брынь М. Я., Коугия В. А., от пункта p до спутника s в эпоху (момент времени) t может быть представлено уравнением
от пункта p до спутника s в эпоху (момент времени) t может быть представлено уравнением
 ,
, . (10.1)
. (10.1) – фазу частоты
– фазу частоты  , поступившей на приемник в эпоху t от спутника s;
, поступившей на приемник в эпоху t от спутника s; – фазу собственной такой же частоты приемника в ту же эпоху.
– фазу собственной такой же частоты приемника в ту же эпоху.
 – время, затраченное на путь сигнала от спутника до приемника;
– время, затраченное на путь сигнала от спутника до приемника; – ошибка часов спутника;
– ошибка часов спутника; – ошибка часов приемника.
– ошибка часов приемника. :
: .
. .
. и учтем, что
и учтем, что  , где T – период колебаний. Получим
, где T – период колебаний. Получим . (10.2)
. (10.2) , (10.3)
, (10.3) . (10.4)
. (10.4) + F.
+ F. , (10.5)
, (10.5) ;
; – частота излучения.
– частота излучения. Неизвестными в такой системе уравнений являются три координаты приемника (Xp, Yp, Zp),а также ns чисел неоднозначности и nt смещений часов приемника.
Неизвестными в такой системе уравнений являются три координаты приемника (Xp, Yp, Zp),а также ns чисел неоднозначности и nt смещений часов приемника.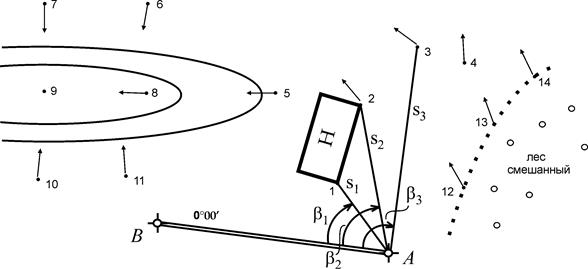







 ,
, ;
; .
. .
. ,
,  ее изображения на снимке (например, левом):
ее изображения на снимке (например, левом): ;
;  .
. .
.
 .
. . (12.2)
. (12.2)
 . (12.3)
. (12.3) ,
,


