
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Глава 1. Организация радиотехнического обеспечения полетовСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте Глава 1. Организация радиотехнического обеспечения полетов Содержание радиотехнического обеспечения полетов Рост интенсивности воздушного движения обуславливает необходимость координации перемещения воздушных судов (ВС) в воздушном пространстве. Основным источником информации о быстропротекающих разнообразных динамических процессах в системе воздушного транспорта (СВТ), средством ее обработки для формирования решений по управлению ими служит комплекс радиотехнических средств навигации, посадки, УВД и электросвязи. Систему мероприятий по сбору этой информации и управление процессами, протекающими в СВТ, с помощью радиотехнических средств для поддержания высокого уровня безопасности и экономичности полетов принято называть радиотехническим обеспечением полетов (РТОП). РТОП представляет собой важную составляющую часть процесса функционирования СВТ и предполагает создание развернутой сети радиотехнических средств различного назначения, обеспечение их функционирования и эксплуатацию (т.е. применение по целевому назначению) для решения задач по сбору, обработке, транспортировке и отображению информации, необходимой для управления производственными процессами в СВТ. Множество радиотехнических средств обеспечения полетов называют подсистемой РТОП или просто средствами РТОП. Подсистема РТОП представляет собой сложную эргатическую систему, включающую наземное и бортовое оборудование средств электросвязи, радиосвязи, навигации, посадки и УВД, и многочисленный инженерно- технический и административный персонал, осуществляющий операции по поддержанию работоспособности и техническому обслуживанию оборудования. В свою очередь, экипажи ВС, персонал службы движения и администрация используют технические средства РТОП по их целевому назначению для управления транспортными процессами в СВТ, т.е. их эксплуатацию. Эксплуатационно-технические характеристики технических средств РТОП и процесс их эксплуатации регламентируются стандартами и рекомендациями ИКАО, что обеспечивает единообразие технологических операций и делает возможным беспрепятственный и надежный обмен информацией между всеми элементами подсистемы и их оперативное взаимодейсивие в режиме полной прозрачности государственных границ. Организацией РТОП называется система мероприятий по определению номенклатуры, состава и размещения материальных и человеческих ресурсов подсистемы РТОП, порядка и режимов ее функционирования. Организационная структура подсистемы РТОП сходна с организационной структурой СВТ. Структурными элементами СВТ являются авиакомпании, аэропорты, базы технического обслуживания и ремонта ВС. Структурными звеньями подсистемы РТОП - базы эксплуатации радиотехнического оборудования и средств электросвязи (базы ЭРТОС). Последние представляют собой самостоятельные производственные предприятия, обеспечивающие функционирование наземных средств РТОП, расположенных в определенном регионе или на территории соответствующего аэропорта. Таким образом, организация РТОП представляет собой один из элементов организации СВТ и составляет важную часть организации УВД. Являясь частью системы УВД средства РТОП, в свою очередь, оказывают определенное обратное воздействие на организацию УВД. Классификация РТС Все РТС можно классифицировать по следующим признакам: - по назначению: 1) РТС навигации; 2) посадки; 3) используемые в комплексах УВД; 4) предупреждения столкновений; 5) опознавания, - по виду информативного параметра радиосигнала: 1) амплитудные; 2) фазовые; 3) частотные; 4) временные, - по виду определяемого навигационного параметра: 1) угломерные; 2) дальномерные; 3) разностно-дальномерные; 4) измерители линейных и угловых скоростей; 5) комбинированные (угломерно-дальномерные), - по дальности действия: 1) РТС ближней навигации (РСБН с дальностью действия <350…400 км); 2) РТС дальней навигации (РСДН с дальностью действия < 2500…3000км); 3) глобальные, - по степени автономности: 1) автономные (радионавигационные устройства); 2) неавтономные (радионавигационные системы). Рис. 1. Зона действия и рабочая область РТС
Зону действия принято характеризовать максимальной Dmax и минимальной Dmin дальностью действия (рис.1). Максимальная дальность действия зависит от используемого диапазона радиоволн и условий их распространения (характера земной поверхности, рельефа местности, состояния атмосферы и ионосферы, времени суток, высоты полета и др.), а также от технических характеристик передающих, приемных и антенных устройств РТС. В частности, основным фактором, учитываемым при оценки дальности действия РТС, работающих в диапазонах сверхдлинных (СДВ) и длинных (ДВ) волн, является мощность излучения наземных станций, электрические свойства подстилающей поверхности и время суток; для средневолновых (СВ) и коротких (КВ) волн - состояние ионизированных слоев атмосферы и время суток; для диапазона метровых волн - учет высоты полета ВС, а также высоты антенн и препятствий на пути распространения радиоволн. Максимальная дальность действия РТС метрового и сантиметрового диапазонов вследствие прямолинейности распространения радиоволн чаще всего определяется дальностью прямой радиовидимости, для расчета которой может быть использовано следующее выражение:
Rпр [км] = (3,5...4,1)
Минимальная дальность действия определяется высотой полета ВС и формой диаграммы направленности в вертикальной плоскости (рис.). Рабочая область -это объем пространства, в пределах которой погрешность определения места ВС не превышает заданную с определенной вероятностью: Rpo = f (Dmax, Dmin, σнп ).
Надежность - это способность РТС выполнять заданные функции и сохранять эксплуатационные показатели в течение заданного интервала времени. РТС относятся к классу восстанавливаемых изделий, т.е. в них могут происходить отказы, они устраняются и эксплуатация продолжается далее. Надежность таких изделий принято характеризовать некоторыми количественными показателями: - среднее время наработки на один отказ Т0 = где -
- интенсивность или частота отказов - вероятность безотказной работы - коэффициент готовности - вероятность нормального функционирования В стандартах ИКАО оговариваются требования к надежности РТС навигации и посадки: Вероятность отказа навигационных средств должна быть Ротк нс ≤ 10-4 за три часа полета; или одно летное происшествие на 107…108 летных часов по вине навигационных систем. РТС посадки должны обеспечивать безопасную автоматическую посадку при вероятности летного происшествия не более 10-7. Пропускная способность - это максимальное число ВС, одновременно обслуживаемых данным типом РТС. Быстродействие - определяется временем, которое затрачивается на получение навигационной информации. Оно должно быть не более 1мин для дозвуковых ВС и не более 3…7 с для сверхзвуковых. Помехоустойчивость - это способность РТС выполнять свои функции в условиях естественных и искусственных помех. Эффективность - показатель полноты решения поставленных перед РТС задач с учетом целевого назначения системы и условий ее работы. Масса и габариты. К техническим характеристикам относятся: - диапазон рабочих частот; - мощность излучаемых сигналов; - чувствительность приемного устройства; - характеристика антенн (форма диаграммы направленности, коэффициент усиления, КНД и др.); - метод обзора пространства; - тип оконечного устройства отображения информации; - потребляемая мощность и др. 2.4. Физические основы радионавигации Основные свойства радиоволн В основу всех радиотехнических методов измерений положены следующие основные свойства радиоволн: - конечная и достаточно стабильная скорость распространения в однородной среде, для инженерных расчетов ее принято считать равной 300000 км/с; - постоянство направления распространения - радиоволны распространяются по кратчайшему расстоянию между точками излучения и приема, на рис.2 представлены траектории распространения радиоволн различных диапазонов.
в) пространственные радиоволны г) излучение волноводного типа (СДВ) (КВ, СВ, ДВ) Рис. 2 Траектории распространения радиоволн различных диапазонов - способность направленного излучения и приема - это способность радиоволн концентрировать энергию излучения (приема) в пределах малых телесных углов за счет применения антенных устройств специальной конструкции. Направленные свойства антенны принято характеризовать функцией диаграммы направленности (ДНА) рис.3.
Рис. 3. Диаграмма направленности антенны - способность радиоволн преломляться и отражаться рис.4.
Р ис. 4. Отражение радиоволн При прохождении границ физических сред радиоволны претерпевают отражение и преломление. - эффект Доплера (рис.5) Если между источником радиоизлучения и приемником есть взаимное изменения расстояния то частота принимаемых колебаний будет отличаться от частоты излучаемых колебаний. Эту разницу называют доплеровским сдвигом частот, и он пропорционален радиальной составляющей скорости изменения расстояния, которая равна проекции вектора скорости на направление излучения.
Рис. 5. Эффект Доплера Если
Рис. 6. Структурная схема импульсного дальномера
На борту ВС устанавливается запросчик, а на земле ретранслятор, способный принимать запросы с борта и переизлучать их. Переизлученные сигналы принимаются на борту. Запросчик излучает кратковременные (импульсные) сигналы. Так как скорость распространения этих сигналов постоянна, то принятые на борту ответные сигналы ретранслятора, запаздывают по отношению к излученным сигналам на время: t з = 2r/c, где r - расстояние между ВС и ретранслятором; с - скорость распространения радиоволн. Так как скорость распространения радиоволн постоянна и известна, то измерив время запаздывания t з ответного сигнала относительно излучаемого запроса, можно определить расстояние r = t з·c/2. Достоинства запросного режима: высокая точность, простота бортовой аппаратуры. Недостатки: ограниченная пропускная способность, наличие дополнительного передатчика на борту ВС
а2. Беззапроснымй режим измерения
Рис. 7. Структурная схема беззапросного дальномера
Сущность беззапросного режима заключается в следующем. Предположим, что на борту ВС и в наземном пункте, расстояние между которыми подлежит определению, установлены согласованные друг с другом точные часы (рис.7), на выходе которых в строго определенные моменты времени формируются импульсные метки (метки времени) U оп. НА борту и на земле такие метки формируются в один и тот же момент времени. На земле (в радиомаяке) ПРД излучает импульсный сигнал в момент формирования метки Uоп. На борту он будет спустя время t = r/c, где r - расстояние между ВС и наземным радиомаяком. Измерив на борту временной интервал межу импульсом метки времени U оп и принятым импульсом ПРД маяка можно определить расстояние между ВС и маяком. Достоинства беззапросного режима: отсутствие дополнительного ПРД на борту ВС; неограниченная пропускная способность. Недостатки: потребность в использовании высокоточных эталонных генераторов (часов) меток времени и необходимость в периодическом согласовании их показаний. б ) Фазовый метод измере ния Метод основан на измерении фазового сдвига Δφ между несущими колебаниями излученного и ретранслированного сигналов в случае запросного режима измерений или между излученными и принятыми сигналами в случае беззапросного режима. Предположим, что передатчик запросчика излучает гармонический сигнал вида е з = Е mз·sinωt. В точку приема он вернется, сдвинутый во времени относительно излученного на величину t з = 2r/c и будет иметь вид (рис.8).
Рис. 8. Запросный и ответный сигналы при фазовых измерениях
е отв = Е m отвsinω(t-2r/c). Обозначим фазы излучаемого и принимаемого сигналов как φ з = ωt и φ отв = ωt-2ωr/с. Тогда разность фаз Δφ будет равна Δφ = φ з - φ отв = 2ωr/c Измерив, фазовый сдвиг Δφ можно определить искомое расстояние r = c·Δφ/2ω. Учтя, что ω=2πf, а с/f = λ получим окончательные выражения: - r = λ·Δφ/4π при запросном режиме измерения; - r = λ·Δφ/2π - при беззапросном режиме. Недостаток метода: возможна неоднозначность измерений.
с) Квазидальномерный метод измерения координат ВС При беззапросном режиме измерения точность измерения дальности зависит от точности синхронизации и стабильности эталонных генераторов (часов) как на борту, так и на земле. Реально используемые часы задают моменты начала отсчета с погрешностью. Обозначим ее величиной Δt ч. Погрешность часов обуславливает погрешность измерения дальности Δr =cΔt ч. Если реальная погрешность достаточна, высока, чтобы ею можно было пренебречь то реально определяемая на борту ВС дальность отличается от истинной и получила название псевдодальности. Метод определения координат ВС, основанный на измерении псевдодальностей до нескольких РНТ, называется псевдодальномерным (рис.9).
Рис. 9. К пояснению псевдодальномерного метода определения координат ВС Измерив две дальности r1 и r2, можно определить координаты ВС путем решения системы двух уравнений: (x - x1)2 + (y-y1)2 =r12
(x- x2)2+ (y-y2)2 = r22 В случае беззапросного режима дальность до i-го радиомаяка измеряется с погрешностью Δr, вызванной уходом бортовых часов Δt ч: t з= t з изм+Δt ч; ri = с(t з изм +Δt ч); Δr = cΔt ч. Измерив, расстояние до третьего маяка, можно не только точно определить координаты ВС, но и рассчитать поправку к показаниям бортовых часов, (x - x1)2 + (y - y1)2=с2(t з изм1+Δt ч)2 (x - x2)2 + (y - y2)2 = с2(t з изм2 +Δt ч)2 (x - x3)2+ (y - y3)2 = с2(t з изм3 +Δt ч)2 решив систему вышеприведенных уравнений. Рис. 10. Схема разностно-дальномерной РНС и временные диаграммы процессов в ней
Предположим, что в точках А и Б установлены передатчики, одновременно излучающие колебания заданного вида, а на борту ВС в точке С ведется прием этих сигналов и измерение временного интервала между ними Δt. Этот временной интервал определиться как:
Δt = tз1 - tз2; t з1 = r1/с; t з2 = r2 ./с; Δt = (r1 - r2)/с = δr/с
Если выполнять полет так чтобы выполнялось условие δr = const, то линия положения, по которой будет двигаться ВС, будет гипербола. По этой причине такие РНС иногда еще называют гиперболическим. В разностно-дальномерных системах может использоваться и фазовый метод измерений. В этом случае на борту ВС производится измерение разности фаз сигналов, принятых от станций А и Б:
φ СА = ωt - ωr1/с; φ СБ = ωt - ωr2/c; Δφ = ω(r1 - r2)/c = ωδr/с;
Δφ = (2π/λ)·δr
Рис.11. Определение направления путем поворота базы поворота базы антенн
б)- определение направления по разности фаз в неподвижных антеннах (рис.12).
Δφ = φ А1-φ А2
Δφ = ω·Δt = ω·δr/c =2π ·δr/λ = 2π·(b·sinυ)/λ.
Рис. 12. Определение направления по разности фаз в в неподвижных антеннах
Амплитудные методы угломерных измерений
ε = max при υ = 0
Рис.13. Диаграмма аправнаправлеи направленности антенны (а) и Методы радионавигации 1. Метод счисления пути - основан на измерении и интегрировании по времени составляющих вектора скорости ВС относительно земной поверхности (рис.16).
Рис. 16. Метод счисления пути
Достоинства метода: - высокая точность; Недостаток метода: - снижение точности определения места ВС из-за накопления погрешностей автономность. датчика скорости с течением времени. 2. Позиционный метод - основан на нахождении поверхностей или линий положения, соответствующих навигационным параметрам, которые характеризуют положение ВС относительно РНТ. Поверхность положения - геометрическое место точек в пространстве, соответствующее одному значению навигационного параметра. Линия положения - множество точек на плоскости в зоне действия РНС, характеризующееся одним и тем же значением навигационного параметра. Местоположение ВС определяется как точка пересечения двух или более линий или поверхностей положения (рис.17).
Рис. 17. Определение места ВС по МАрКЕРные радиомаяки (МРМ) МРМ представляют собой передающие устройства, предназначенные для обозначения определенных пунктов на земной поверхности, важных для воздушной навигации. С помощью МРМ обозначают исходные и конечные пункты маршрутов, места изломов воздушных трасс, воздушные входные и выходные коридоры. В системах посадки МРМ применяют для обозначения точек, лежащих на оси ВПП и удаленных от начала ВПП на определенные расстояния. Использование сигналов таких маяков облегчает осуществление захода на посадку. Для повышения точности маркировки заданных пунктов в МРМ используют излучение колебаний в ограниченной области пространства, что обеспечивается применением антенны направленного действия.
направлении, совпадающим с осью ВПП, и вытянутой в перпендикулярном направлении (рис.21,б.) Зона действия МРМ на линии курса охватывает отрезки длиной (600±200)м в точках расположения внешнего и дальнего МРМ, (300±100)м у ближнего и (150±50)м у внутреннего МРМ. Такая форма диаграммы излучения в горизонтальной плоскости исключает возможность пролета маяка вне зоны его излучения, когда заход на посадку происходит с некоторым уклонением от оси ВПП. Размеры сечения диаграммы излучения МРМ в горизонтальной плоскости L и B уменьшаются по мере приближения к торцу ВПП от дальнего привода к ближнему. Все маркерные маяки работают на несущей частоте 75 МГц. Колебания несущей частоты подвергаются амплитудной модуляции напряжением звуковой частоты. Стандартами ИКАО установлены значения частот модуляции 400, 1300 и 3000 Гц. Помимо амплитудной модуляции излучаемый сигнал подвергается телеграфной манипуляции сигналами точек или тире или их комбинацией. Скорость передачи 6 точек/с или 2 тире/с. Установленные размеры зоны излучения МРМ обеспечивают прием их сигналов при заходе на посадку со скоростью 240 км/ч: дальнего привода - в течение 12±4 с; ближнего - 6±2 с. В международных аэропортах согласно Приложению 10 к Конвенции ИКАО сигналы опознавания МРМ устанавливают следующим образом: сигналы внешнего МРМ манипулируются тире (2 тире/с), среднего МРМ чередующимися точками и тире (6 точек/с и 2 тире/с), внутреннего - точками (6 точек/с). В настоящее время в гражданской авиации используются следующие виды маркерных радиомаяков: - МРМ-48 - входит в состав оборудования посадки ОСП. Используется одна частота модуляции Fмод = 3000 Гц. Сигналы опознавания: ДПРМ - 2 тире/с, БПРМ - 6 точек/с; - МРМ-70, МРМ-В и МРМ-97 - соответствуют стандартам ИКАО. Используют следующие частоты модуляции и сигналы опознавания: МРМ внешний - Fмод = 400 ГЦ; 2 тире/с; МРМ средний - Fмод = 1300 ГЦ; 6 точек/с и 2 тире/с чередуются; МРМ внутренний - Fмод = 3000 ГЦ; 6 точек/с. В МРМ-70, МРМ-В и МРМ-97 излучение сигналов ведется без прерывания несущей частоты. Назначение и классификация Радиомаячные системы посадки (РМСП) предназначены для получения на борту ВС и выдачи экипажу и в САУ информации о величине и знаке отклонений ВС от номинальной траектории снижения, а также для определения моментов пролета характерных точек на траектории захода на посадку. В гражданской авиации используют четыре разновидности РТС посадки: так называемые упрощенные системы посадки ОСП (оборудование системы посадки), радиомаячные системы посадки (РМСП) и радиолокационные системы посадки (РЛСП). В свою очередь, РМСП подразделяются на РМСП диапазонов МВ и ДМВ, эксплуатируемых в настоящее время, и перспективные РМСП диапазона СМВ. Внедрение в последние годы космических средств определения местоположения ВС открывает возможности применения последних для решения задач управления полетом в процессе захода на посадку и ухода на второй круг. Упрощенные системы посадки обеспечивают вывод ВС на аэродром, выполнение предпосадочного маневра и определение места ВС в двух фиксированных точках на траектории посадки. Радиомаячные системы посадки МВ и ДМВ диапазонов позволяют задавать прямолинейную пространственную траекторию захода на посадку (рис.22,а) и определять текущее положение ВС относительно ее, а также фиксировать моменты прохода двух или трех точек на линии глиссады, расположенных на определенном удалении от ВПП. РМСП этого типа обеспечивают задание единственной траектории - глиссады планирования и управление ВС в пределах определенных, достаточно узких, секторов вокруг нее. На РМСП диапазона СМВ возлагаются более сложные функции. Эти системы должны обеспечивать определение пространственных координат ВС в определенной области пространства, размеры которой значительно (рис.22,б) превосходят сектора управлений существующих ныне РМСП, и позволять выполнение полетов по любой криволинейной четырехмерной пространственно-временной траектории посадки.
Они используются для наземного контроля процесса захода на посадку и в случае необходимости передачи на борт с помощью систем воздушной связи указания о корректирующих маневрах относительно траектории захода. Состав и размещение Состав оборудования аэродрома для обеспечения посадки ВС зависит от категории аэродрома. На некатегорированных аэродромах устанавливают упрощенные системы посадки (ОСП) (рис.23). В их состав входят дальний и ближний приводные маркерные радиопункты (ДПРМ и БПРМ), оснащенные приводными радиостанциями (ПРС) и маркерными радиомаяками (МРМ). ДПРМ и БПРМ устанавливают на расстояниях соответственно 4000±20 и 1050±150 м от порога ВПП. Дальний МРМ обеспечивает экипажу сигнализацию момента времени проверки высоты полета (по радиовысотомеру), расстояния до точки приземления и готовности бортовых систем к обеспечению полета на конечном этапе захода на посадку. Ближний МРМ сигнализирует момент времени проверки по РВ высоты принятия решения и переходе к визуальному этапу посадки. Аэродромы оборудуют, кроме того, светосигнальными системами огней малой интенсивности, автоматическим радиопеленгатором (АРП) и обзорным радиолокатором (ОРЛ-А). При установке на аэродроме РМСП состав оборудования и его эксплуатационные характеристики определяются соответствующими стандартами ИКАО [3]. ИКАО определены 3 категории критериев для посадочных систем. СП любой категории должна обеспечивать с высокой вероятностью успешный заход на посадку до нижнего предела высоты Hmin при дальности видимости на ВПП не менее Xmin. Значения Hmin и Xmin приведены в табл.2. Системы посадки 3 категории должны также обеспечивать автоматизацию приземления, движения по ВПП и рулежным дорожкам.
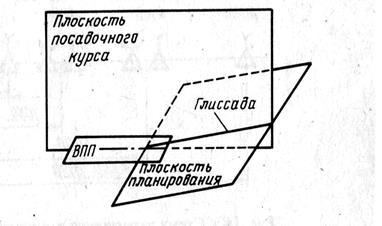
В РМСП МВ пространственная траектория (глиссада) планирования формируется курсовым и глиссадным радиомаяками (КРМ и ГРМ). Первый из них задает в пространстве вертикальную плоскость (плоскость курса), проходящую через ось ВПП, а второй - наклонную плоскость (плоскость глиссады), которая при пересечении с плоскостью курса дает линию глиссады
(рис.24). На рис.25 представлена схема размещения РТС посадки на аэродроме и требования стандартов ИКАО к размещению элементов РМСП метрового диапазона волн.
Рис. 24. Плоскости курса и глиссады, задаваемые в РМСП
Рис.25. Схема размещения элементов РМСП на некоторых аэродромах СНГ
Таблица 2
На аэродромах II и III категорий со сложным рельефом местности перед порогом ВПП в состав оборудования может дополнительно входить внутренний МРМ, предупреждающий экипаж о близости порога ВПП. Он размещается на удалении 75 … 450 м от порога ВПП и не более чем ±30 м от оси ВПП. На аэродромах со сложным рельефом в зоне захода или другими особенностями в состав РМСП может быть включен дополнительный МРМ, размещенный на удалении до 11 км от торца ВПП. Стандарты ИКАО предусматривают использование двух маркерных пунктов, называемых внешним (ВРП) и средним (СРП) и возможность, в случае необходимости, установки третьего, внутреннего. Средний МРМ предупреждает экипаж о приближении к точке начала визуального наблюдения, внутренний - для обозначения момента пролета ВПР в системах II категории. Антенна системы КРМ устанавливается на оси ВПП у противоположного торца. Расстояние от антенной системы ГРМ до порога ВПП выбирается так, чтобы высота опорной точки траектории посадки (точка на оси ВПП над ее порогом) была равна 15-0+3 м. Оно зависит от минимального угла наклона глиссады, уклонов местности и других факторов. Боковое смещение антенны ГРМ выбирают из условия обеспечения минимальной высоты пролета над препятствием, и оно не превышает 180 м.
Помимо опорной точки глиссады планирования, расположенной над торцом ВПП, в документах ИКАО отмечаются некоторые характерные точки на глиссаде (рис.26).
Рис. 26. Характерные точки на траектории захода
Типы РМСП, эксплуатируемые в настоящее время на аэродромах ГА, приведены в табл. 3. В международных аэропортах устанавливают также РМСП типа ILS. По принципу действия и эксплуатационно-техническим характеристикам они аналогичны РМСП типа СП-70, СП-75, СП-80. Таблица 3 Наземное оборудование РМСП
Рис. 27. Структурная схема РМСП
Курсовой радиомаяк КРМ путем излучения электромагнитных колебаний определенного типа задает в пространстве вертикальную плоскость посадочного курса, и эта плоскость совмещается с осью ВПП. Глиссадный радиомаяк задает в пространстве плоскость планирования, наклоненную к горизонту. В результате пересечения этих плоскостей образуется линия планирования – глиссада. Маркерные маяки обозначают моменты пролета характерных точек на этапе захода на посадку. Все три типа маяков РМСП работают на своих, независимых друг от друга несущих частотах. На борту ВС сигналы КРМ, излучаемые на частоте fКРМ принимаются курсовым радиоприемником КРП,преобразуются и на его выходе выделяется электрический сигнал постоянного тока В случае, когда ВС находиться точно на глиссаде, т.е. в точках пересечения плоскости посадочного курса и плоскости планирования, стрелки нуль-индикаторного прибора располагаются в центре шкалы, а сигналы рассогласования Маркерные радиомаяки работают на своей частоте f МРМ. Сигналы этих маяков принимаются на бору маркерным радиоприемником МРП. В момент пролета ВС над МРМ сигнал на выходе МРП вызывает срабатывание звуковой и световой сигнализации. Рис. 29. Зависимость РГМ от углового отклонения
На равносигнальном направлении (РСН), которое совмещается с плоскостью посадочного курса (глиссады), эта разность равна нулю, а при отклонении от него РГМ возрастает. Величина и знак РГМ будут зависеть от величины и стороны отклонения ВС относительно РСН. Из принимаемых на борту сигналов формируется постоянное напряжение, пропорциональное РГМ. Оно подводится к планкам прибора посадки (ПСП), вертикальная планка которого указывает положение линии курса, а горизонтальная линии глиссады. Структурная схема радиомаяка равносигнального типа (рис.28) включает: генератор высокой частоты, генераторы низкочастотных колебаний ГНЧ1 и ГНЧ2, амплитудные модуляторы АМ1 иАМ2 и антенны А1 и А2. Колебания ВЧ, формируемые ГВЧ, подвергаются амплитудной модуляции колебаниями низких частот 90 и 150 Гц и подводятся к антеннам А1 и А2, формирующими поля излучения, энергия которых распределена в пространстве в соответствии с зависимостью диаграмм направленности помощью, которого задается линия планирования. Для приема сигналов КРМ и ГРМ на борту ВС используются радиоприемные устройства супергетеродинного типа (рис.30).
Рис. 30. Структурная схема КРП и ГРП На выходе приемника с помощью фильтров Ф1 и Ф2 выделяются низкочастотные колебания частот 90 и 150 Гц. Эти колебания выпрямляются выпрямителями В1 и В2 и через схему вычитания подводятся к стрелочному указателю. Сигнал на выходе схемы вычитания пропорционален РГМ, а его полярность указывает сторону отклонения ВС от глиссады. Выходные сигналы приемника после выпрямления подводятся также и к сумматору, выходной, сигнал которого управляет работой бленкерной сигнализации. При отсутствии сигнала на выходе сумматора бленкерная сигнализация не срабатывает и бленкер экспонируется в поле зрения пилотов, что указывает на отказ наземного маяка или бортового приемника. В радиомаяках более высоких категорий (II и III), у которых требования к стабильности и точности задаваемых траекторий значительно выше, принцип работы КРМ и ГРМ несколько от рассмотренного и получил название метода угломерных измерений с «опорным нулем» (рис.31) [1]. Однако, следует отметить, что формируемое в таких маяках поле излучения имеет структуру аналогичную полю равносигнальных радиомаяков и не требует изменения бортового оборудования.
Рис.31. Диаграммы излучения маяка с “опорным нулем” Требования ИКАО и основные эксплуатационно-технические характеристики РМСП МВ В соответствии с действующими стандартами ИКАО определены основные экс
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-15; просмотров: 1889; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.141 (0.017 с.) |

 .
. ,
, - интервал времени межу соседними отказами;
- интервал времени межу соседними отказами; - количество отказов.
- количество отказов. ;
; ;
; , где
, где  - среднее время восстановления;
- среднее время восстановления;

 а ) прямолинейное (МВ, ДМВ, СМВ) б) поверхностные радиоволны (ДВ, СВ)
а ) прямолинейное (МВ, ДМВ, СМВ) б) поверхностные радиоволны (ДВ, СВ)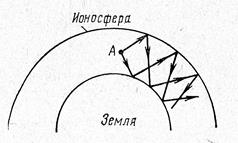


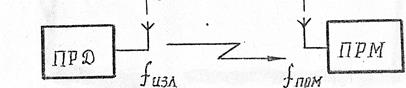 r(t)
r(t) = 0, то fпрм = fизл, при
= 0, то fпрм = fизл, при  0 fпрм ≠ fизл.
0 fпрм ≠ fизл.



 а) метод “ максимума ” - может быть реализован с помощью антенной системы, имеющую диаграмму направленности с отчетливо выраженным минимумом. Поворачивая антенну, добиваются максимума амплитуды сигнала и по повороту конструктивной оси антенны в момент достижения максимума сигнала судят о направлении на источник излучения (рис.13).
а) метод “ максимума ” - может быть реализован с помощью антенной системы, имеющую диаграмму направленности с отчетливо выраженным минимумом. Поворачивая антенну, добиваются максимума амплитуды сигнала и по повороту конструктивной оси антенны в момент достижения максимума сигнала судят о направлении на источник излучения (рис.13).


 Характер излучения в вертикальной плоскости имеет форму вертикального факела (рис.21,а.). Диаграмма направленности антенны МРМ в горизонтальной плоскости имеет обычно вид фигуры, сжатой в
Характер излучения в вертикальной плоскости имеет форму вертикального факела (рис.21,а.). Диаграмма направленности антенны МРМ в горизонтальной плоскости имеет обычно вид фигуры, сжатой в



 Таким образом, перспективные РМСП предоставляют большую свободу в выборе траектории посадки и открывают возможности для создания высокоэффективных систем контроля процесса захода ВС на посадку.
Таким образом, перспективные РМСП предоставляют большую свободу в выборе траектории посадки и открывают возможности для создания высокоэффективных систем контроля процесса захода ВС на посадку.


 , величина которого пропорциональна угловому смещению ВС от плоскости посадочного курса, а полярность определяется стороной отклонения. Сигнал
, величина которого пропорциональна угловому смещению ВС от плоскости посадочного курса, а полярность определяется стороной отклонения. Сигнал  на вертикальную планку нуль-индикатора и в САУ ВС. Сигналы глиссадного маяка ГРМ, излучаемые на частоте f ГРМ, принимаются глиссадным радиоприемником. На его выходе выделяется сигнал постоянного тока
на вертикальную планку нуль-индикатора и в САУ ВС. Сигналы глиссадного маяка ГРМ, излучаемые на частоте f ГРМ, принимаются глиссадным радиоприемником. На его выходе выделяется сигнал постоянного тока  , величина и полярность которого характеризуют отклонение ВС от плоскости планирования. Этот сигнал поступает на вертикальную планку прибора посадки и в САУ ВС.
, величина и полярность которого характеризуют отклонение ВС от плоскости планирования. Этот сигнал поступает на вертикальную планку прибора посадки и в САУ ВС. и
и  . Линия пересечения диаграмм направленности представляет собой равносигнальное направление, с
. Линия пересечения диаграмм направленности представляет собой равносигнальное направление, с




