Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Характеристика спутниковых навигационных систем GPS и GLONASSСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Глобальные системы навигации GPS и GLONASS разработаны в интересах министерств обороны США и России, а также могут использоваться гражданскими потребителями. Они имеют примерно одинаковую структуру, основаны на одних и тех же принципах и проходят в настоящее время стадию опытной эксплуатации. Структурно каждая из систем включает в себя три основных сегмента: - космический сегмент; - сегмент управления; - сегмент, представляющий собой пользователя. Структура космических сегментов представлена на рис.51 и 52, а их характеристики даны в табл.10.
Таблица 10
Космический сегмент
Рис. 51. Орбитальная группировка GPS Рис. 52. Орбитальная группировка ГЛОНАСС
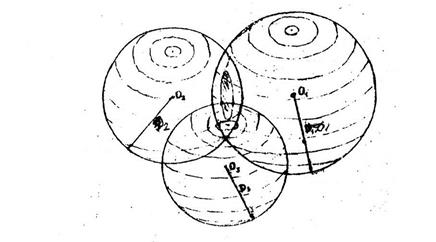
Космический сегмент GPS и ГЛОНАСС состоит из 24 спутников: 21 рабочий и 3 резервных, расположенных таким образом, что с любой точки Земли обеспечивается постоянное наблюдение одновременно 5…9 спутников с углом возвышения над горизонтом более 150. При этом каждый спутник находится в поле наблюдения до 5 часов. В системе GPS спутники равномерно распределены на 6 орбитах, плоскости которых наклонены под углом 550 к плоскости экватора и на каждой орбите находится по 4 спутника. Орбиты разнесены вдоль экватора с интервалом 600. В системе ГЛОНАСС спутники расположены на трех орбитах, угол наклона которых 64,80, на каждой орбите находится восемь спутников. Орбиты разнесены вдоль экватора с интервалом 1200. Сегмент управления Сегмент управления GPS состоит из пяти контрольных станций (КС) и трех наземных антенн, обслуживающих линию связи "вверх". Для слежения за всеми видимыми спутниками и накопления данных о расстоянии, получаемых по сигналам спутников, на КС используются приемники GPS. Информация от КС обрабатывается на главной станции управления (ГСУ), где определяется состояние эталонов времени (часов) спутников, состояние и характеристики орбит, а также обновляется навигационная информация каждого спутника. Эта информация от ГСУ через наземные антенны передается на спутники. Сегмент управления GLONASS состоит из ГСУ, а также контролирующих и загрузочных станций и осуществляет контроль за спутниками, выполняет управляющие функции и определяет навигационные данные, которыми модулируются закодированные спутниковые навигационные сигналы. Данные о результатах измерений, выполненные на контролирующих станциях, обрабатываются на ГСУ и используются для вычисления навигационных данных, которые передаются на спутники через загрузочные станции. Синхронизация эталонов времени на спутниках обеспечивается ГСУ путем передачи параметров коррекции часов. Сегмент пользователей Сегмент пользователей состоит из антенн и приемников-процессоров, которые осуществляют прием сигналов и навигационные расчеты для получения информации о местоположении и точном времени.В июне 1999года Европейским сообществом принято решение о создании глобальнойнавигационной спутниковой системы “ Galileo ”. Космический сегмент системы будет состоять из 32 спутников, три из которых являются резервными. Спутники будут располагаться на трех орбитах высотой порядка 23600 км, с наклоном к экватору около 550. Кроме среднеорбитальных спутников предполагается запустить девять геостационарных спутников. Система разрабатывается в интересах гражданских пользователей, она дополнит GNSS, и будет иметь ряд отличий и преимуществ по сравнению с GPS. Проектируемая точность определения МС в горизонтальной плоскости не более 10 м, в вертикальной плоскости не более 4 м (при гарантированной вероятности 95%). С учетом локальных дополнений точность определения местоположения планируется не хуже 0,5 м. 3.8.3. Принципы функционирования СНС. [ 4,5,6 ] В основу определения позиции ВС (любого потребителя GPS) положен принцип измерения дальностей до навигационных спутников. Если в любой момент времени известны координаты спутников в околоземном пространстве, то могут быть измерены первичные навигационные параметры - дальности до спутников, видимых из точки наблюдения. Измеренная дальность D1 до одного спутника определяет поверхность положения ВС в виде сферы с радиусом, равным измеренной дальности (рис.53).
Рис. 53. Поверхности положения НИСЗ
Дальности до двух спутников определяют две поверхности положения, пересечения которых дает линию положения в виде окружности. Поверхность положения, полученная с помощью третьего спутника, может иметь пересечение с линией положения, полученной от первых двух спутников, только в двух точках. Таким образом, имея информацию о дальностях до трех спутников, возможное положение ВС можно ограничить двумя возможными точками. Методом логического исключения можно определить, какая из двух точек является истинной позицией ВС. В бортовой аппаратурепотребителей заложены специальные алгоритмы, позволяющие отличать правильную позицию ВС от ложной. В СНС реализуется псевдодальномерный метод определения дальности до спутников, что требует высокоточной синхронизации бортовых и спутниковых эталонов времени. А это требует пеленгования минимум трех-четырех спутников одновременно.
|
||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-15; просмотров: 730; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 52.14.7.103 (0.006 с.) |