
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Матрицы. Системы линейных алгебраических уравнений (СЛАУ)Содержание книги
Поиск на нашем сайте
Нулевой – вектор, все компоненты которого равны нулю и обозначается в тексте программы как: a=[0;0;0]; a= zeros(3,1); Транспонированный - вектор at= a’; Матрица единичная E=[1 0 0;0 1 0;0 0 1]; E=eye(3); Транспонированная – матрица, в которой строки заменены на соответствующие столбцы Равенство матриц Норма (длина) вектора Норма матрицы (Эвклидова) Складывать или вычитать можно только вектора с одинаковой размерностью Складывать или вычитать можно только матрицы с одинаковой размерностью Умножение вектора на константу. Умножение матрицы на константу Скалярное произведение векторов Это значение суммы произведений соответствующих компонент двух векторов. Угол между векторами. Косинус угла Умножение матриц Обратной матрицей называется такая квадратная матрица Обращение матрицы Метод Гаусса-Жордана состоит из четырёх этапов 1) Строим расширенную матрицу дописав к исходной квадратной матрице единичную матрицу того же размера 2) Делим элементы k-й строки начиная с k-ого на
3) Преобразуем все i-е строки кроме k-й, i=1,2,3,…,n i≠k так, чтобы элементы cik=0. Для этого из каждого элемента i-й строки начиная с k-ого вычитаем соответствующий элемент k-й строки, умноженный на элемент cik, т.е. 4) Проверяем условие k<n, если оно справедливо, то k=k+1 и выполняем алгоритм с пункта 2, иначе выводим полученную обратную матрицу, расположенную на месте единичной. Система линейных алгебраических уравнений (СЛАУ). В общем виде СЛАУ можно записать в следующем виде Совокупность коэффициентов Совокупность неизвестных Используя выше приведенные определения, запишем СЛАУ в матричном виде: Классификация СЛАУ. СЛАУ называется: Переобусловленной, если n>m. Недообусловленой, если n<m. Нормальной, если n=m. Однородной, если вектор Все методы решения СЛАУ можно разделить на две группы: точные и итерационные. Точные методы позволяют получить решение путем выполнения определённого и точного количества арифметических операций. При этом погрешность решения определяется лишь точностью представления исходных данных и точностью вычислительных операций. Точные методы: Метод обратной матрицы Метод Гаусса. Метод Гаусса включает два этапа: Первый этап (прямой ход) заключается в последовательном исключении неизвестных из системы уравнений и состоит из n–1 шага. На первом шаге с помощью первого уравнения исключается x1 из всех последующих уравнений начиная со второго, на втором шаге с помощью второго уравнения исключается x2 из последующих уравнений начиная с третьего и т.д. Последним исключается xn-1 из последнего n-го уравнения так, что последнее уравнение будет содержать только одно неизвестное xn. Такое последовательное исключение неизвестных равносильно приведению матрицы коэффициентов к треугольному виду. Строка, с помощью которой исключаются неизвестные, называется ведущей строкой, а диагональный элемент в этой строке – ведущим элементом. Второй этап (обратный ход) заключается в последовательном вычислении искомых неизвестных и состоит из n шагов. Решая последнее уравнение, находим неизвестное xn. Далее используя это значение из предыдущего уравнения вычисляем неизвестное xn-1 и т.д. Последним найдем неизвестное x1 из первого уравнения. Матрица, содержащая помимо. коэффициентов при неизвестных столбец свободных членов 1) Строим расширенную матрицу 2) Преобразуем все строки, расположенные ниже k-ой так, чтобы элементы cik=0, для этого вычисляем множитель b=-сi,k/ck,k и каждую i-ую строку заменяем суммой i–ой и k-ой умноженной на b, т.е. ci,j=ci,j+b*ck,j где i = k+1,k+2,k+3,….,n и j = k,k+1,k+2,…,n+1 3) Проверяем k = n-1 если нет, то выбираем новую ведущую строку k=k+1 и переходим на пункт 2, иначе выполняем пункт 4. 4) Обратный ход. Из последнего n-ого уравнения определяем последнее n-ое неизвестное. xn=cn,n+1/cn,n Последовательно, из предыдущих уравнений начиная с i=n-1, вычисляем соответствующие неизвестные xi. Последним, определяется первое неизвестное из первого уравнения Для уменьшения погрешности вычислений используют модификации метода Гаусса, которые определяются выбора«ведущего» элемента. В модификации с частичным выбором на каждом k-м шаге прямого хода в качестве «ведущего» выбирается наибольший по модулю элемент из неприведённой части k-го столбца матрицы, т.е. При полном выборе в качестве «ведущего» элемента выбирается максимальный по модулю элемент из всей неприведённой части матрицы коэффициентов системы: Обусловленность систем линейных алгебраических уравнений. Если система плохо обусловлена, то это значит, что погрешности коэффициентов матрицы и свободных членов или погрешность округления при расчетах могут сильно исказить решение. Исходную систему уравнений Из исходной системы Вводим понятие числа обусловленности: Метод простых итераций. Алгоритм метода состоит из трёх этапов. Первый этап. Приведение СЛАУ к итерационному виду, для этого разрешим каждое уравнение относительно соответствующего неизвестного: Второй этап. Проверяем условие сходимости Третий этап. Осуществляем уточнение решения по полученной итерационной формуле
|
||||
|
|
Последнее изменение этой страницы: 2022-01-22; просмотров: 56; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.137.177.116 (0.008 с.) |

 AT=A’;
AT=A’; т.е. aij= bij где i=1,2,3,…,n j=1,2,3,…,m
т.е. aij= bij где i=1,2,3,…,n j=1,2,3,…,m nor=sqrt(sum(a.^2)); nor=norm(a);
nor=sqrt(sum(a.^2)); nor=norm(a); Nor_A=sqrt(sum(A.^2)); Nor_A=norm(A,’fro’);
Nor_A=sqrt(sum(A.^2)); Nor_A=norm(A,’fro’); c=a+b;
c=a+b; C=A+B;
C=A+B; c=λ*b;
c=λ*b; C= λ *B;
C= λ *B; z=a’ * b;
z=a’ * b; r=a’*b/(norm(a)*norm(b))
r=a’*b/(norm(a)*norm(b))
 Количество столбцов матрицы
Количество столбцов матрицы  должно равняться количеству строк матрицы
должно равняться количеству строк матрицы  Элемент
Элемент  вычисляется как скалярное произведение i-й строки матрицы
вычисляется как скалярное произведение i-й строки матрицы  и j-го столбца матрицы
и j-го столбца матрицы 
 C=A*B;
C=A*B; при умножении которой на исходную как справа так и слева получается единичная матрица
при умножении которой на исходную как справа так и слева получается единичная матрица  AO=inv(A);
AO=inv(A); методом Гаусса-Жордана заключается в построении расширенной матрицы
методом Гаусса-Жордана заключается в построении расширенной матрицы  и преобразовании расширенной матрицы так, чтобы на месте исходной получилась единичная матрица, тогда на месте единичной получится обратная матрица:
и преобразовании расширенной матрицы так, чтобы на месте исходной получилась единичная матрица, тогда на месте единичной получится обратная матрица: 
 и задаём номер ведущей строки k=1. E=eye(n); C=[A,E];
и задаём номер ведущей строки k=1. E=eye(n); C=[A,E];
 j = k,k+1,k+2,…,2·n т.е.
j = k,k+1,k+2,…,2·n т.е.  =1.
=1.
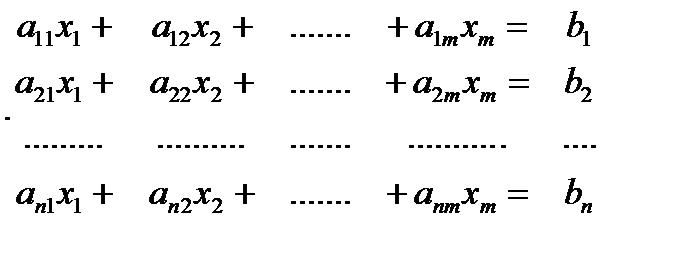
 , i =1,2,3,…,n; j=1,2,3,….,m системы можно представить в виде матрицы:
, i =1,2,3,…,n; j=1,2,3,….,m системы можно представить в виде матрицы: 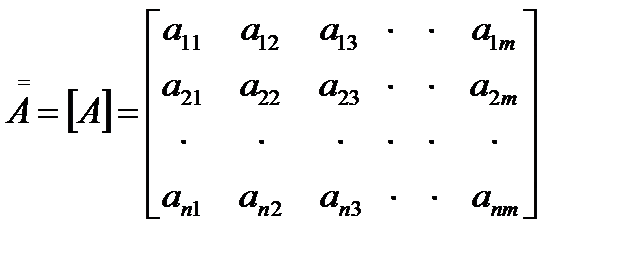
 в виде вектора
в виде вектора  Совокупность неизвестных
Совокупность неизвестных  в виде вектора
в виде вектора 
 Решить СЛАУ значить найти такие значения вектора x, подстановка которого в систему, обращает каждое уравнение этой системы в тождество
Решить СЛАУ значить найти такие значения вектора x, подстановка которого в систему, обращает каждое уравнение этой системы в тождество . Неоднородной, если вектор
. Неоднородной, если вектор  . Если система, имеет хотя бы одно решение, она называется совместной. Система, не имеющая решений, называется несовместной. Совместная система, имеющая единственное решение, называется определенной, а имеющая бесчисленное множество решений, называется неопределенной. Очевидно, что однородная система всегда совместна, так как имеет хотя бы одно решение
. Если система, имеет хотя бы одно решение, она называется совместной. Система, не имеющая решений, называется несовместной. Совместная система, имеющая единственное решение, называется определенной, а имеющая бесчисленное множество решений, называется неопределенной. Очевидно, что однородная система всегда совместна, так как имеет хотя бы одно решение  , которое называется тривиальным.
, которое называется тривиальным. x=inv(A)*b x=A\b
x=inv(A)*b x=A\b , называется расширенной
, называется расширенной 
 размерностью n на n+1, приписав, справа к матрице
размерностью n на n+1, приписав, справа к матрице  вектор
вектор 
 т.е. ci,j=ai,j, ci,n+1=bi, где i=1,2,3,…,n j=1,2,3,…,n
т.е. ci,j=ai,j, ci,n+1=bi, где i=1,2,3,…,n j=1,2,3,…,n 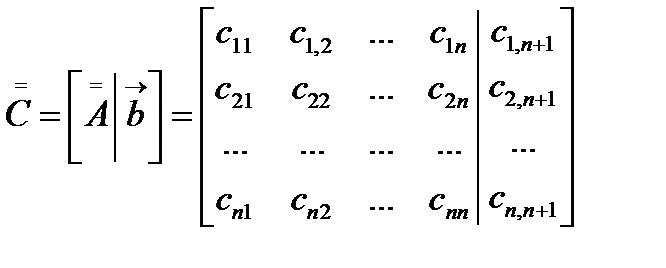 Задаем номер ведущей строки k = 1
Задаем номер ведущей строки k = 1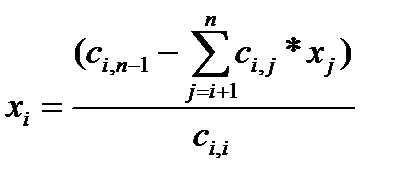
 Строка, содержащая этот элемент, переставляется с k-й строкой расширенной матрицы
Строка, содержащая этот элемент, переставляется с k-й строкой расширенной матрицы Для этого осуществляется необходимая перестановка как строк, так и столбцов в расширенной матрице коэффициентов. При этом следует помнить, что перестановка столбцов равносильна переименованию неизвестных.
Для этого осуществляется необходимая перестановка как строк, так и столбцов в расширенной матрице коэффициентов. При этом следует помнить, что перестановка столбцов равносильна переименованию неизвестных. с учетом погрешности в векторе
с учетом погрешности в векторе  запишем как
запишем как  или
или  и тогда
и тогда  , отсюда можно выразить ошибку
, отсюда можно выразить ошибку  . Абсолютную погрешность определим, как норму ошибки
. Абсолютную погрешность определим, как норму ошибки  или
или  . Определим относительную погрешность
. Определим относительную погрешность  . Определим
. Определим 
 получим
получим  далее определим
далее определим  и подставим в определение относительной погрешности, получим
и подставим в определение относительной погрешности, получим 
 и тогда
и тогда  .
.
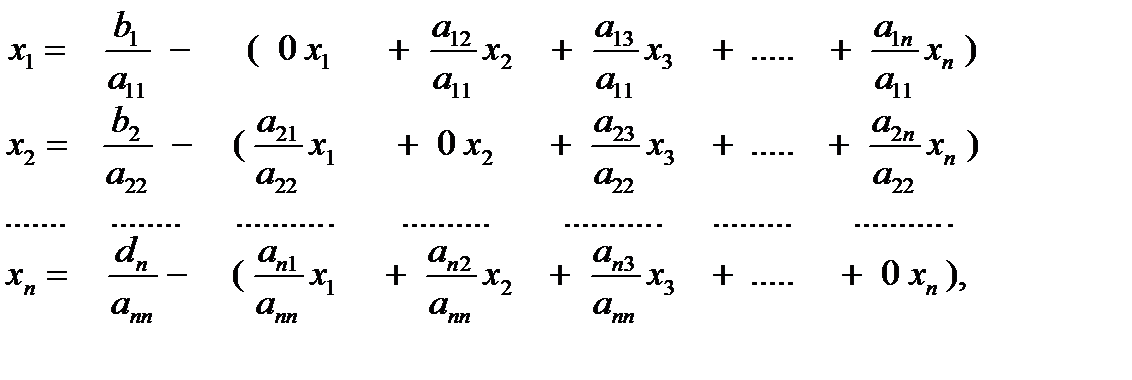
 Тогда итерационную формулу запишем в виде:
Тогда итерационную формулу запишем в виде:  где вектор
где вектор  – приведенный столбец свободных членов,
– приведенный столбец свободных членов,  – приведенная матрица коэффициентов
– приведенная матрица коэффициентов если условие не выполняется, то преобразуем исходную систему и выполняем 1-й этап.
если условие не выполняется, то преобразуем исходную систему и выполняем 1-й этап. За начальное приближение принимается
За начальное приближение принимается  Условием окончания итерационного процесса является выполнение условия
Условием окончания итерационного процесса является выполнение условия  где величина ε определяет точность получаемого решения, а
где величина ε определяет точность получаемого решения, а  – смежные приближения к решению.
– смежные приближения к решению.


