
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
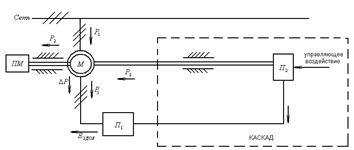
Структурная схема электромеханического каскада.Содержание книги
Поиск на нашем сайте
Рис.124
Управляющее воздействия вносится в преобразующий элемент Технические средства, с помощью которых происходит реализация каскадного регулирования. По этому признаку различают: 1. вентильные каскады. В этом случае преобразователи
2. вентильно -машинные каскады. В этом случае один из преобразователей является статическим, а 2-й либо электрошинным, либо сочетанием статического преобразователя с электромашинным либо сочетанием 2-х электрических машин. Т.о. классификация каскадных схем регулирования может быть представлена следующим образом: 1. электрический вентильный каскад электрический вентильно-машинный каскад 3. электромеханический вентильно-машинный каскад. 4. комбинированный вентильно-машинный каскад Для того чтобы представить себе вид регулировочных механических характеристик при каскадном регулировании, запишем уравнение для тока на выходе преобразователя
где
В этом выражении:
С учётом этого семейства регулировочных характеристик при каскадном регулировании будет иметь вид:
Рис.125 Показатели качества: 1. напряжение: однозонное вниз 2. плавность: зависит от вида каскада, в любом случае высокая 3. допустимая нагрузка на валу: регулирование при постоянном моменте 4. стабильность: высокая, но ниже при частотном регулировании
5. энергетические показатели: КПД всегда высокое: 6. диапазон регулирования: теоретически может быть любым, но практически не превышает 2:1 Т.к. в дальнейшем при увеличении диапазона существенно ухудшаются массогабаритные показатели. Т.о. главным преимуществом каскадного регулирования является экономия электрической энергии, поэтому целесообразность использования таких ЭП определяется мощностью. Поэтому каскадное регулирование применяют в ЭП менее 1,5 МВт.
Энергетическая эффективность ЭП. Одна и та же алгоритм функционирования имеющий одинаковые технологические параметры, а также технические показатели можно реализовать с различными энергетическими затратами. Если учесть, что ЭП в настоящее время потребляет около 70% всей вырабатываемой электроэнергии, становится, очевидно, что цена неоправданных потерь эл.энергии весьма велика. К основным энергетическим показателям ЭП относятся: КПД, коэффициент мощности, обобщенный критерий электрической эффективности -
КПД ЭП.
Функционирование ЭП в процессе преобразования или передачи энергии
В частном случае, если ЭП работает в режиме В этом случае:
В частном случае, если
Рис.126
Такое выражение для КПД обычно применяют при паспортизации различного типа устройств, где используется понятие номинального КПД:
При этом обычно составляются графические зависимости:
Рис.127
Выражение 118, 119,120 представлены для мгновенных мощностей и как, следствие не учитывают различные режимы работы ЭП, а также их длительности. Обычно переход от соотношения 118, 119 и 120 к выражению 117* осуществляется с помощью интегрирования выражений 118,119,120. В частности для циклических процессов наиболее универсальным и точным значением КПД является циклический КПД:
где
Но, чтобы иметь точное графическое представление о цикловом КПД необходимо ввести понятие о так называемом, использований КПД. Для одного и того же циклического процесса КПД, рассчитанный по выражениям 121 и 118 могут существенно отличаться. В этой связи не имеет смысла и зачастую приводит к ошибке применяемые на практике сравнение различных режимов КПД без учёта режима их работы. Например: «Реостатное регулирование не экономично, а регулирование по системе преобразователь- двигатель экономично» есть ничто иное, как некомпетентный штамп. Фактическая оценка эффективности может быть сделана только с учётом особенностей режимов работы ЭП, а также их продолжительности. Чтобы проиллюстрировать это выражение рассмотрим следующий пример: Пусть ЭП, обеспечивающий регулирование скорости в диапазоне В этом случае:
Рис.128
Рассмотрим 2 варианта регулирования скорости: 1. реостатное – изменение активного сопротивления цепи ротора. 2. регулирование по системе П-Д.
Чтобы найти выражение, соответствующее цикловому КПД по формуле (121) для обоих вариантов найдём выражение для потерь мощности В случае реостатного регулирования (АД):
Потери мощности для того же двигателя для системы ПД:
где
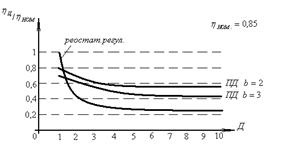
тогда, подставляя эти значения в уравнения (4) и (5) получим: 1. Реостатное регулирование: 2. П-Д: Если для обоих представленных выражений рассчитаем функцию, выраженную зависимость отношения циклового КПД к паспортному от величины диапазона регулирования для различных вариантов, то получим следующие графические зависимости, рис.129:
Рис.129
По построенным зависимостям видно, что даже при очень хороших условиях Система П-Д имеет преимущества по При малых диапазонах Если же
|
||||||
|
|
Последнее изменение этой страницы: 2016-04-19; просмотров: 417; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.21.105.119 (0.01 с.) |

 и соответственно транспортируется через
и соответственно транспортируется через  в виде добавочной ЭДС
в виде добавочной ЭДС 

 -ЭДС наведенная в фазе обмотки ротора при
-ЭДС наведенная в фазе обмотки ротора при  (ротор неподвижен).
(ротор неподвижен). - потери напряжения в каскаде.
- потери напряжения в каскаде. - эквивалентное, активное сопротивление каскада. Если пренебречь потерями напряжения в каскаде
- эквивалентное, активное сопротивление каскада. Если пренебречь потерями напряжения в каскаде  , а так же учесть, что ЭДС на кольцах неподвижного ротора
, а так же учесть, что ЭДС на кольцах неподвижного ротора  , то для режима идеализированного Х.Х.двигателя, т.е. при отсутствии нагрузки на его валу, когда ток в ОР
, то для режима идеализированного Х.Х.двигателя, т.е. при отсутствии нагрузки на его валу, когда ток в ОР  , а следовательно и
, а следовательно и  , получим:
, получим:
 - так называемое скольжение каскада в режиме идеализированного х.х. Отсюда получим выражение для угловой скорости при каскадном регулировании:
- так называемое скольжение каскада в режиме идеализированного х.х. Отсюда получим выражение для угловой скорости при каскадном регулировании:
 - угловая скорость идеального Х.Х. каскада
- угловая скорость идеального Х.Х. каскада - угловая скорость идеального Х.Х. двигателя – угловая скорость ВМП – (синхронная скорость).
- угловая скорость идеального Х.Х. двигателя – угловая скорость ВМП – (синхронная скорость).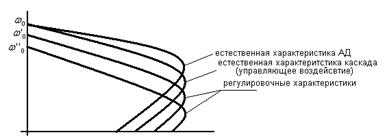
 зависит от вида каскада, но в целом не высокий
зависит от вида каскада, но в целом не высокий .
. неизбежно сопровождается потерями
неизбежно сопровождается потерями  . Весьма важно – соотношение между
. Весьма важно – соотношение между  (117*)
(117*) , т.е. в режиме с
, т.е. в режиме с  , который может быть представлен в виде нагрузочной диаграмм, рис.126.
, который может быть представлен в виде нагрузочной диаграмм, рис.126. (118)
(118) :
: (119)
(119)
 (120)
(120)
 - коэффициент загрузки
- коэффициент загрузки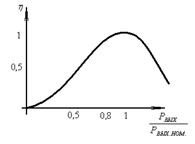
 (121)
(121) - переданная (преобразованная) энергия за цикл
- переданная (преобразованная) энергия за цикл - потери энергии за цикл
- потери энергии за цикл (122)
(122) (123)
(123) ,
,  , работает в циклическом режиме со скоростями вращения
, работает в циклическом режиме со скоростями вращения  , на каждой ступени цикла привод работает одинаковое время:
, на каждой ступени цикла привод работает одинаковое время: 
 , где
, где  - диапазон регулирования.
- диапазон регулирования.
 .
.
 - при одинаковой продолжительности ступеней цикла
- при одинаковой продолжительности ступеней цикла - коэффициент, учитывающий дополнительные потери в преобразовательном устройстве (ПУ):
- коэффициент, учитывающий дополнительные потери в преобразовательном устройстве (ПУ):



 и
и  (
( перед реостатным, лишь при условии что
перед реостатным, лишь при условии что  .
. реостатное регулирование более энергетически эффективно.
реостатное регулирование более энергетически эффективно. (система Г-Д, то регулирование по системе П-Д предпочтительнее, только при диапазонах боде 3:1). Естественно при этом нельзя забывать и о других преимуществах системы П-Д.
(система Г-Д, то регулирование по системе П-Д предпочтительнее, только при диапазонах боде 3:1). Естественно при этом нельзя забывать и о других преимуществах системы П-Д.


