
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Вычисление установившейся ошибки при типовых воздействияхСодержание книги
Поиск на нашем сайте Точность систем управления является важнейшим показателем их качества. Чем выше точность, тем выше качество системы. Однако предъявление повышенных требований к точности вызывает неоправданное удорожание системы, усложняет ее конструкцию. Недостаточная точность может привести к несоответствию характеристик системы условиям функционирования и необходимости ее повторной разработки. Поэтому на этапе проектирования системы должно быть проведено тщательное обоснование требуемых показателей точности. В этом разделе рассматриваются методы определения ошибок, возникающих при работе систем управления с детерминированными входными воздействиями. Вначале анализируются ошибки систем в переходном режиме. Затем особое внимание уделено простым способам расчета ошибок систем в установившемся режиме. Будет показано, что все системы управления можно разделить по величине установившихся ошибок на системы без памяти, так называемые статические системы, и системы, обладающие памятью, – астатические системы управления. Типовые входные воздействия
Для оценки качества работы систем управления рассматривают их поведение при некоторых типовых воздействиях. Обычно такими воздействиями служат следующие три основные вида функций: а) ступенчатое воздействие: g(t) =
б) линейное воздействие: g(t) =
в) квадратичное воздействие:
В некоторых случаях рассматривают обобщенное полиномиальное воздействие:
Ступенчатое воздействие является одним из простейших, но именно с его помощью определяется ряд важных свойств систем управления, связанных с видом переходного процесса. Линейное и квадратичное воздействия часто бывают связаны с задачами слежения за координатами движущегося объекта. Тогда линейное воздействие соответствует движению объекта с постоянной скоростью; квадратичное - движению объекта с постоянным ускорением. Переходные процессы при типовых воздействиях можно построить следующим образом. Пусть задана передаточная функция замкнутой системы управления W(p). Тогда x(p) = W(p) g(p), где g(p) – изображение соответствующего воздействия. Например, если С помощью вычетов или по таблицам находим обратное преобразование Лапласа и получаем вид переходного процесса x(t) для заданного входного воздействия:
гдеRes x(p) – вычет функции x(p) в точке a. Обычно реакция системы на ступенчатое воздействие имеет вид, показанный на рис. 21,а или рис. 21,б.
Рис. 21. Переходный процесс, как правило, характеризуют двумя параметрами – длительностью переходного процесса (временем установления) и величиной перерегулирования. Под временем установления tу понимают временной интервал, по истечении которого отклонение |x(t) - xуст | выходного процесса от установившегося значения xуст не превышает определенную величину, например, 0,1gо. Время установления является важным параметром САУ, позволяющим оценить ее быстродействие. Величину tу можно оценить приближенно по амплитудно-частотной характеристике системы. При заданной частоте среза В зависимости от характера собственных колебаний системы переходный процесс в ней может быть колебательным, как это показано на рис. 21, б, или плавным гладким, называемым апериодическим (рис. 21,а). Если корни характеристического уравнения системы действительны, то переходный процесс в ней апериодический. В случае комплексных корней характеристического уравнения собственные колебания устойчивой системы управления являются затухающими гармоническими и переходный процесс в системе имеет колебательный характер. При малом запасе устойчивости САУ ее собственные колебания затухают медленно, и перерегулирование в переходном режиме получается значительным. Как следствие, величина перерегулирования может служить мерой запаса устойчивости системы. Для многих систем запас устойчивости считается достаточным, если величина перерегулирования
Установившийся режим При проектировании систем управления часто требуется оценить ошибку слежения в установившемся режиме Очень важно, что величина установившейся ошибки может быть легко найдена с помощью теоремы о предельном значении оригинала: При использовании этой теоремы нужно выразить величину ошибки e (p) через g(p). Для этого рассмотрим структурную схему замкнутой системы управления (рис. 22).
Рис. 22 Очевидно, e (p) = g(p) - x(p) = g(p) - H(p)e(p). Отсюда
гдеHe(p) = 1/(1+H(p)); g(p) - изображение типового входного воздействия.
|
||
|
|
Последнее изменение этой страницы: 2021-07-18; просмотров: 123; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.008 с.) |

 , g(p) =
, g(p) =  ;
;
 t, t > 0;
t, t > 0;  ;
;
 /2, t > 0; g(p) =
/2, t > 0; g(p) =  .
.
 , t > 0.
, t > 0. , то
, то  и для g(t) = g0 получим
и для g(t) = g0 получим  .
. ,
,
 . Для оценки качества системы используется также величина перерегулирования, определяемая соотношением
. Для оценки качества системы используется также величина перерегулирования, определяемая соотношением  .
. .
. . В зависимости от вида воздействия и свойств системы эта ошибка может быть нулевой, постоянной или бесконечно большой величиной.
. В зависимости от вида воздействия и свойств системы эта ошибка может быть нулевой, постоянной или бесконечно большой величиной. .
.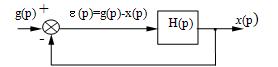
 или e (p) = He(p)g(p), где He(p) =
или e (p) = He(p)g(p), где He(p) =  называется передаточной функцией системы управления от входного воздействия g(p) к ошибке слежения e(p). Таким образом, величину установившейся ошибки можно найти с помощью следующего соотношения:
называется передаточной функцией системы управления от входного воздействия g(p) к ошибке слежения e(p). Таким образом, величину установившейся ошибки можно найти с помощью следующего соотношения: ,
,


