Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Существующие математические схемы.Содержание книги
Поиск на нашем сайте
1. Непрерывные детерминированные модели. D-схема (Dynamic) Примером могут служить дифференциальные уравнения. 2. Дискретные детерминированные модели. F-схема (Finita) Примером могут служить конечные автоматы (автоматы Мура) 3. Дискретные вероятностные модели. P-схема (Probability) Примером могут служить вероятностные автоматы 4. Непрерывные вероятностные модели. Q-схема (Queue) Системы массового обслуживания, системы управления запасами, теория очередей. Перечисленные типовые математические схемы, естественно, не могут претендовать на возможность описания на их базе всех процессов, происходящих в больших информационно-управляющих системах. Для таких систем в ряде случаев более перспективным является применение агрегативных моделей. 5. Агрегативные модели. А-схема (Aggregate) Показано, что в терминах агрегативных моделей можно описать все остальные схемы. АГРЕГАТ И ЕГО ФУНКЦИОНИРОВАНИЕ.
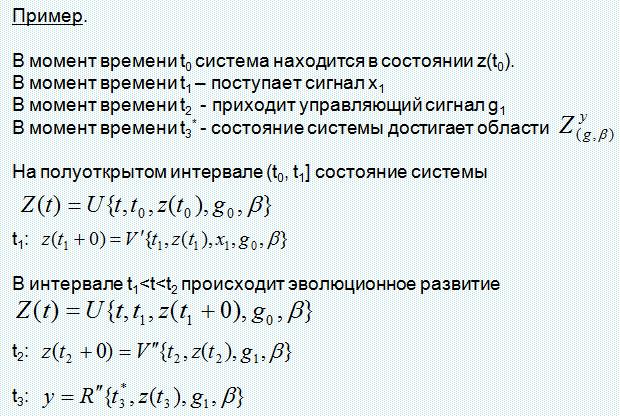
ПРИМЕР ПРЕДСТАВЛЕНИЯ СМО В ВИДЕ АГРЕГАТА. АГРЕГАТ – это обобщенный объект, определяемый множествами T, X, Y, Z, B, g и операторами H и R, где:
|
|||||
|
|
Последнее изменение этой страницы: 2017-02-17; просмотров: 413; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.18.220.61 (0.009 с.) |