
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Типові ланки систем регулюванняСодержание книги
Похожие статьи вашей тематики
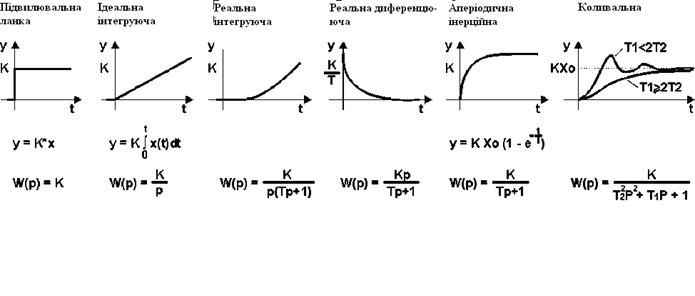
Поиск на нашем сайте Ланка системи регулювання – це елемент, що має певні властивості в динамічному відношенні. Ланки систем регулювання можуть мати різну фізичну основу (електричні, пневматичні, механічні і ін. ланки), але відноситься до однієї групи. Співвідношення вхідних і вихідних сигналів в ланках однієї групи описуються однаковими передавальними функціями. Прості типові ланки, приведені на рис.14.4 (на рисунку представлені перехідні характеристики і передавальні функції):
• а) підсилювальна, • б), в) інтегруюча ідеальна, інтегруюча реальна, • г) диференціюючи (ідеальна, реальна), • д) аперіодична інерційна, • е) коливальна.
Рисунок 14.4 Перехідна характеристика і передаточні функції типових ланок. а) Підсилювальна ланка, пропорційна ланка підсилює вхідний сигнал в К раз. Рівняння ланки у = К*х, передавальна функція W(р) = К (де – К коефіцієнт підсилення). Приклад підсилювальної ланки - механічні передачі, датчики. Підсилювальна ланка є безінерційною ланкою. б) Ідеальна інтегруюча ланка має вихідну величину пропорційну інтегралу вхідної величини. При подачі сигналу на вхід ланки вихідний сигнал постійно зростає. Ідеальна інтегруюча ланка є астатичною, оскільки не має сталого режиму. в) Реальна інтегруюча ланка має передавальну функцію представлену на малюнку14.4-в.Реальна інтегруюча ланка є ланкою із запізнюванням. Перехідна характеристика на відміну від ідеальної ланки є кривою. Приклади інтегруючої ланки: ємність, наповнювана водою;інтегральний імпульсний виконавчий механізм. д) Аперіодична (інерційна) ланка першого порядку представлена на рис.14.4-д, де Т- постійна часу. Більшість теплових об’єктів є аперіодичними ланками. Наприклад, при подачі на вхід електричної печі напруги її температура змінюватиметься по аналогічному закону. е) Коливальна ланка представлена на рис.14.4-е. При подачі на вхід ступінчастого впливу амплітудою х0 перехідна крива матиме один з двох видів: аперіодичний ( при Т1 ≥2Т2) або коливальний ( приТ1<2Т2). ж) Ланка, що запізнюється (на рис.2.4 не представлено). Передавальна функція ланки: Y(t)= X(t - τ)або W(р) = e-τр. Вихідна величина Y повторює вхідну величину X з деяким запізнюванням τ. Наприклад, стрічковий транспортер, конвеєр.
Лекція 15 Системи дістанційної передачі на змінному струмі. Системи дистанційної передачі або системи синхронної передачі, часто застосовуються в електромеханічних пристроях автоматики для передачі на значні відстані лінійних і кутових переміщень, а також передачі обертання. У цих системах механічне переміщення за допомогою датчика перетвориться в електричний сигнал, який поступає по дротах (лініям зв'язку) на приймач. Останній в свою чергу перетворить електричний сигнал знову в механічне переміщення, пропорційне первинному (початковому) механічному переміщенню. Дуже часто система дистанційної передачі призначена для забезпечення електричними засобами з необхідною точністю синхронного переміщення двох або декількох вісей, механічноне зв'язаних між собою. Будь-яка система дистанційної передачі складається з трьох основних частин: датчика, який виконує роль задаючого або ведучого пристрою; лінії зв'язку, по якій передаються електричні сигнали, і приймача, що виконує роль приймального або відомого пристрою. Системи дистанційної передачі застосовуються для різних цілей. Вони можуть застосовуватися для вимірювання на відстані різних величин (наприклад, здійснювати вимірювання рівня рідини у шлюзі на пульті диспетчера); для передачі команд на відстань (наприклад, обслуговування пропуску судів через шлюзи); для контролю за протіканням якого-небудь процесу і т.д. У автоматиці найбільше застосування одержали системи дистанційної передачі кута, які класифікуються: по роду живлячої енергії — на системи постійного токаї змінного струму; по характеру руху — на системи плавної і крокової дії.
Дистанційні передачі змінного струму. Дистанційна передача з диференціальними перетворювачами соленоїдного типу.
У системі (рис. 15.1) використовуються два диференціальних трансформаторних перетворювачі соленоїдного типу, вторинні котушки яких з’єднані між собою зустрічно. Припустимо, що якір першого з трансформаторних перетворювачів перебуває у середньому положенні; тоді вторинні напруги U1 '= U'2. Якщо при цьому положення якоря у другому трансформаторному перетворювачі таке саме, то U1 ' '= U 1 '' і схема зрівноважена. Так само відбувається й тоді, коли обидва якорі займають хоч і не середнє положення, але однакове для обох: тоді різниці U1 ' - U'2 = U1 ' '— U"2, і схема також зрівноважена. Рівновага буде порушена у разі, якщо якорі двох перетворювачів займуть неоднакові положення: тоді різниця напруг ( U1 ' - U'2 ) — ( U1 ' '— U"2 ) після підсилення (1 — підсилювач) потрапляє до сервоелектродвигуна 2, який за допомогою ексцентрика 3переміщує якір другого перетворювача в таке положення, в якому перебуває якір першого. Кожному положенню якоря першого трансформаторного перетворювача відповідає певне усталене положення ротора серводвигуна і покажчика 4.
Дистанційні передачі змінного струму на сельсинах Широке поширення в схемах автоматичного управління і регулювання набули електричні системи синхронної передачі. Системи синхронної передачі служать для вимірювання і передачі на відстань кутових переміщень або для підтримки синхронного обертання вісей механізмів, механічно не пов'язаних один з одним. У системах синхронної передачі можуть застосовуватися різні типи електричних машин. Проте в системах малої потужності найбільше поширення набули індукційні або асинхронні машини. За свою здатність за наявності певних електричних з'єднань самосинхронізуватися вони одержали назву сельсинів. За конструктивним виконанням сельсини можуть бути контактні і безконтактні. У простому випадку схема передачі кута за допомогою контактних сельсинів, тобто індукційна самосинхронізуюча передача, складається з двох електрично зв'язаних однакових за будовою сельсинів, виконаних по типу асинхронних машин з фазним ротором, але значно менших розмірів. Сельсин-датчик служить для передачі заданих кутових переміщень. Ротор сельсина-датчика повертається на певний кут у ручну або автоматично від приводу. Сельсин-приймач використовується для відтворення заданого сельсином-датчиком кутового переміщення валу ротора. За допомогою диференціального сельсина алгебраїчно підсумовуються кутові переміщення двох механічно не зв'язаних валів. Сельсин-трансформатор служить для відтворення кутового переміщення ротора сельсина-датчика у вигляді пропорційної електричної напруги. Система передачі кутових переміщень валу на відстань з використанням однофазних сельсинов змінного струму називається індукційною дистанційною (синхронної) передачею. Обмотки датчика і приймача, сполучені між собою лінією зв'язку (передачі), називають обмотками синхронізації. Обмотки, які приєднані до мережі живлення і створюють магнітний потік, називають обмотками збудження. Індукційні системи синхронного зв'язку і сельсин-датчики і сельсин-приймачі Трифазні сельсини це звичайні, асинхронні двигуни з фазним ротором. Обмотка ротора є обмоткою синхронізації і через кільця приєднується до лінії зв'язку. Трифазні системи синхронної передачі набули поширення в цілях синхронізації обертання двох і більш двигунів, механічно не пов'язаних один з одним (система електричного валу). Двигуни, що працюють в системі електричного валу, звичайно не називають сельсинами, хоча за принципом здійснення взаємного зв'язку і своїй будові вони не відрізняються від сельсинів. У однофазних сельсинів живлення обмоток збудження здійснюється від однофазної мережі. Обмотки синхронізації виконуються як звичні трифазні обмотки двигунів і з'єднуються в зірку. Однофазні сельсини можуть бути виконані в двох конструктивних варіантах залежно від розташування обмотки збудження. Якщо обмотка збудження укладається на роторі, а обмотка синхронізації — на статорі, то число контактних кілець скорочується до двох, але через кільця весь час проходитиме струм збудження. При розташуванні обмотки збудження на статорі, а обмотки синхронізації на роторі, незважаючи на те, що число кілець збільшиться до трьох, струм через щітки і кільця буде і проходите тільки у момент переміщення ротора. Перевагою цього варіанту є зручність балансування ротора. Напруга живлення в обох варіантах підводиться до однофазної обмотки, тому і процеси, що відбуваються в системах, абсолютно однакові, і з погляду характеристик системи байдуже, де розташована обмотка збудження. Обмотка збудження може бути розподіленою і зосередженою, тобто виконаної у вигляді котушок збудження, як у явно-полюсних машин. При розподіленій обмотці крива моменту сельсина в початковій своїй частині виходить недостатньо крутою. Тому при малих кутах розузгодження індикаторні передачі мають підвищеною похибку. Усунути цей недолік можна шляхом застосування додаткової обмотки, утворюючої короткозамкнений контур по поперечній вісі машини. Обмотка синхронізації виконується розподіленою і вкладається в пази пакету сталі аналогічно роторній обмотці асинхронного двигуна. Нормальним типом однофазного сельсина є машина, що має зосереджену обмотку збудження на статорі і розподілену обмотку синхронізації на роторі. Для можливості самосинхронізації сельсинів в межах одного обороту число полюсів необхідне брати рівним двом.
Індукційні системи синхронного зв'язку залежно від величини моменту, що розвивається ними, розділяються на індикаторні і силові. Індикаторна система синхронному зв'язку служить для передачі кутових переміщень, що задаються датчиком при невеликому моменті опору приймача. У індикаторних систем синхронізуючий момент на валу приймача незначний. Тому для вказування кутових переміщень на валу приймача безпосередньо кріпиться урівноважуюча стрілка (індикатор). У таких системах підсилювальні і додаткові виконавчі елементи звичайно не застосовуються. У силових системах синхронного зв'язку на валу приймача є відносно У силових системах синхронного зв'язку напруга, що знімається з обмотки статора приймача, подається на підсилювач, а потім на виконавчий двигун. На рисунку 15.32 приведена дистанційна індукційна передача змінного струму (сельсина передача), яка складається з двох електрично зв'язаних і однакових за будовою сельсинів. Роторні обмотки сельсинів w живляться від загальної мережі. Трьохпроменеві обмотки статорів сельсинів сполучені між собою. При такому вмиканні сельсини мають властивість само встановлюватися в синфазне положення, яке досягається за рахунок внутрішніх електромагнітних сил. Змінний струм, який утворюється статором, пронизує фазові обмотки ротора, утворюючі в них ЕРС змінного струму. ЕРС,які наводяться у кожному з променів статорної обмотки одного сельсина дорівнюють ЕРС, які наводяться у відповідних променях статорної обмотки другого сельсина,і спрямовані зустрічно. Тому струми в з’єднувальних проводах не протікають, оскільки кут розузгодження Θ між вісями датчика і приймача (Θ =(α— β) рівний нулю. При повороті ротора сельсина-датчика (Д) уручну або автоматично на кут β рівність ЕРС порушується. З'являється різниця електрорушійних сил ΔЕ = Е'— Е", і в сполучних дротах протікає струм
де Rзаг - загальний активний опір кола,; Zзаг – повний опір електричного кола.
Лекція 16 Принципи побудови телемеханічних систем Особливістю телемеханічних систем є наявність в них пристроїв для передачі інформації на значні відстані. Для правильного функціонування автоматичних систем необхідно, щоб інформація в процесі передачі зазнавала якнайменші спотворення. В умовах територіальної роз'єднаності частин системи і дії перешкод виникають труднощі виконанні цієї вимоги. Для вирішення задачі передачі інформації сформувалася особлива область науки і техніки — телемеханіка, яка охоплює теорію і технічні засоби перетворення і передачі на відстань інформації для управління технічними системами. Телемеханічні системи набули велике поширення при централізованому управлінні територіально роз'єднаними пристроями в енергетиці, на залізничному транспорті, газо- і нафтопроводах і т.д. Тільки використовуючи засоби телемеханіки, можна створити автоматизовані системи управління виробничими процесами. За функціями які виконуються і типом інформації,яка передається телемеханічні системи підрозділяють на наступні групи: 1) системи телекерування — забезпечують управління на відстані окремими об'єктами, устаткуванням або цілими виробничими комплексами; 2) системи телесигналізації — здійснюють контроль на відстані за станом або положенням керованих або контрольованих об'єктів; 3) системи телевимірювання— призначені для вимірювання на відстані різних фізичних величин (струму і напруги, тиску, швидкості і т. д.); 4) системи передачі даних — забезпечують передачу на відстань цифрової і іншої інформації про роботу виробничих об'єктів для використання її в обчислювальних або управляючих машинах; 5) комбіновані системи, які об’єднують деякі з перерахованих вище систем. Телемеханічні системи включають системи передачі інформації(СПІ). СПІ називатимемо сукупність технічних засобів, яка забезпечує передачу інформації від джерела до виконавчого пристрою. СПІ складається з джерела повідомлення (ДП); кодуючого пристрою (КП), який формує з повідомлення А сигнал; модулятора (М), що перетворює сигнал у вигляд, зручний для передачі по лінії зв'язку (ЛЗ) — фізичного середовища, по якій передаються сигнали; демодулятора (Д), що перетворює сигнал в первинний вигляд; декодуючого пристрою (ДУ), що формує з сигналу повідомлення Б. Поприйнятому повідомленню повинен бути сформований сигнал реалізації (виконання). Цю задачу вирішує окремий пристрій — формувач сигналу реалізації (ФСР), впливаючий на виконавчий пристрій (ВП). Призначення системи — передати повідомлення від джерела до одержувача, причому повідомлення Б, прийняте одержувачем, повинне відповідати переданому повідомленню А. Припередачі від джерела до одержувача повідомлення піддається спотворенням за рахунок дії перешкод. Перешкодою називається стороннє збурення в СПІ, дія якого приводить до невідповідності переданої і прийнятої інформації. У складі розглянутої СПІ є одне джерело інформації і один пристрій її реалізації. У реальних умовах в СПІ часто входить декілька самостійних джерел повідомлення. В цьому випадку передачу сигналів кожного джерела можна здійснити по своїй лінії зв'язку. Таке рішення не завжди доцільне, оскільки споруда великого числа ліній вимагає великих витрат. Якщо ж передавати сигнали різних джерел по одній ліній зв'язку, виникає необхідність в рішенні наступної задачі: забезпечити проходження сигналів кожного джерела по своєму незалежному каналу, створеному в єдиній лінії зв'язку. СПІ, в яких сигнали різних джерел повідомлень передаються по окремих каналах, називаються багатоканальними, а сукупність технічних пристроїв, що забезпечують незалежну передачу сигналів від різних джерел повідомлень по одній лінії зв'язку, утворює канал зв'язку. У багатоканальних системах окрім вказаних раніше пристроїв на передаючій стороні необхідно мати пристрій, що формує канальну ознаку — формувач канальних сигналів SK (ФКС), а на приймальній стороні роздільник канальних сигналів (РКС). Якісні признаки імпульсів струму Носіями інформації є сигнали. Передача інформації від джерела до виконавчого пристрою здійснюється послідовним формуванням сигналів, що мають певні характеристики. У телемеханіці використовуються дискретні і безперервні сигнали, відповідні дискретним і безперервним повідомленням. Безперервним називається сигнал, у якого параметр, несучий інформацію, може приймати будь-яке значення в деяких заданих межах. Прикладами безперервних (аналогових) повідомлень є повідомлення про безперервний ряд значень вимірюваних фізичних величин: швидкості руху, температури, тиск і т.д. Безперервні сигнали найчастіше використовуються в телевимірюванні. Дискретним називається сигнал, у якого параметр, несучий інформацію, може приймати тільки декілька заданих значень. Приклад дискретних повідомлень — текст який передається, для передачі якого на російській мові використовуються 54 символи: 32 букви алфавіту, 10 цифр і розділових 12 знаків. Дискретні сигнали використовуються, як правило, в системах передачі даних, телекеруванні і телесигналізації. Кожне дискретне повідомлення передається за допомогою дискретних сигналів, іменованих імпульсними посилками. Передаючий телемеханічний пристрій формує дискретні сигнали з імпульсних посилок так, щоб в ці сигнали була «записана» телемеханічна інформація. Для цієї мети імпульсним посилкам додаються певні якісні ознаки. Якісні ознаки імпульсів струму оцінюють з погляду простоти їх утворення і розшифровки, можливості передачі імпульсу із заданою якісною ознакою по різних лініях зв'язку (дротяним і бездротовим), а також їх стійкості до перешкод. У телемеханічних системах використовують наступні ознаки імпульсів. Амплітудна ознака — імпульсні посилки відрізняються за амплітудою (мал. 16.1,а). Розшифровка амплітудних ознак здійснюється за допомогою релейних елементів різної чутливості, що включаються в канал зв'язку на приймальній стороні. Амплітудна ознака імпульсів струму принципово застосовується при будь-яких лініях зв'язку. Проте ця ознака володіє низькою перешкодостійкістю, оскільки амплітуда імпульсів на приймальній стороні може бути сильно спотворена через зміни параметрів лінії зв'язку, а також через дію перешкод. Амплітудні ознаки застосовуються лише для кабельних ліній зв'язку невеликої протяжності із стабільними параметрами. Переважне поширення цей вид імпульсної ознаки набув при двох градаціях амплітуди (імпульс великої і малої амплітуди)m=2. Полярна ознака (мал. 16.1,б) — імпульси розрізняються полярністю струму, тобто число градацій m=2; цюознаку можна використовувати тільки для дротяних ліній зв'язку. Полярна ознака характеризується вищою перешкодостійкістю, ніж амплітудна. Полярність струму можна зафіксувати на приймальній стороні за допомогою поляризованого реле. Часова (широтно-імпульсний) ознака (мал. 16.1,в) — імпульсні посилки відрізняються один від одного тривалістю. При використовуванні такої ознаки на передаючій стороні повинен бути пристрій, що змінює тривалість посилок, а на приймальній стороні — пристрої, що розрізняють посилки різної тривалості. Як посилка може бути використана і пауза
між двома імпульсами. В цьому випадку зміна ознаки посилки полягатиме в зміні тривалості паузи. Часову ознаку можна використовувати при будь-яких лініях зв'язку. Проте ця ознака має порівняно невисоку перешкодостійкість, оскільки тривалість імпульсу або паузи змінюється під дією перешкод в каналі зв'язку. Звичайно застосовують тільки дві градації (т—2) — великої і малої тривалості, відмінні одна від одної не менше ніж в 3—4 рази. Частотна ознака (мал. 16.1,г)— імпульсні посилки відрізняються один від одного по частоті. Для утворення частотних посилок застосовують частотні генератори по числу використовуваних частот або один перебудовуваний генератор. Розшифровка частотних ознак виконується за допомогою електричних фільтрів. Частотні ознаки можна використовувати при будь-яких лініях зв'язку: вони мають високу перешкодостійкість, оскільки частота імпульсів при передачі практично не спотворюється. Частотна ознака допускає одночасну передачу по каналу зв'язку декількох імпульсів різних частот. Фазова ознака (мал. 16.1,д)— імпульсні посилки відрізняються по фазі щодо опорного сигналу Uon, який є в місці прийому. Часто,як опорний сигнал використовується напруга мережі змінного струму 50 Гц. Найпростіша технічна реалізація фазової ознаки досягається при двох крайніх значеннях фаз сигналів 0 і 180°. Фазові ознаки можуть бути використані при будь-якій лінії зв’язку. Каналом зв'язку називається сукупність технічних засобів, які забезпечують передачу повідомлень по лінії зв'язку від одного джерела до одного приймача. Слід підчеркнути, що канал і лінія зв’язку — різні поняття. У утворенні каналу зв'язку,крім лінії зв'язку, беруть участь прийомо-передаюча апаратура телемеханіки і пристрої зв’язку. За допомогою різних технічних засобів на одній і тій же лінії зв'язку можна одержати декілька каналів зв'язку. В даний час у якості ліній зв'язку використовуються дротяні лінії зв'язку, лінії електропередач і радіолінії. Якщо дротяні лінії зв'язку використовуються тільки для передачі телемеханічної інформації, то вони називаються фізичними дротяними лініями зв’язку. По фізичних лініях організовується багато каналів зв'язку для передачі інформації багатьом приймачам або від багатьох джерел. Це здійснюється за допомогою частотного і тимчасового розділення сигналів. Дротяні лінії зв'язку діляться на повітряні і кабельні. Повітряні лінії зв'язку є металевими дротами, підвішеними за допомогою ізоляторів і спеціальної арматури на стовпах. Кабельні лінії зв'язку складаються з ізольованих паралельних дротів, укладених в загальну вологозахисну оболонку, а іноді в броньові окови. Кабелі бувають підземні, підводні і повітряні. Слід зазначити, що фізичні провідні лінії зв’язку це — це кращий варіант для організації каналів зв’язку, по яких можна передавати телемеханічні повідомлення. Проте він дорогий і тому прокладка самостійної лінії зв'язку на великі відстані виконується тільки у деяких випадках.Як правило для передачі телемеханічної інформації організуються канали зв'язку по так званим зайнятих лініях, по яких передається інформація зв'язку (телеграфні і фототелеграфні повідомлення, телефонний зв'язок, радіомовлення і т.д.). В цьому випадку для цілей телемеханіки призначається телефонний або телеграфний канал, тобто виділяється визначена полосачастот. Телефонний канал пропускає спектр частот від 300 до 2700, - 3400Гц. Він може розподілятися в свою чергу на телеграфні канали. Ширина смуги телеграфного каналу, як правило, не перевищує 140 Гц і цілком достатня для передачі звичного телемеханічного повідомлення. При цьому для передачі телемеханічної інформації використовується добре налагоджена апаратура зв'язку, тобто відбувається проста заміна інформації,яка передається. Замість повідомлень зв'язку передаються телемеханічні повідомлення. Іноді для утворення каналів зв'язку використовують лінії енергопостачання, причому у зв'язку з великим рівнем перешкод передача сигналів відбувається на частотах в діапазоні від 30—50 Гц до 300 кГц. Лінії енергопостачання, які застосовуються для передачі телемеханічних сигналів, розподіляються на високовольтні лінії електропередачі (ВЛ) і промислові або розподільчі силові мережі. Канали зв'язку по ВЛ широко застосовуються для управління об'єктами в енергосистемах. У останній час вони почали використовуватися для телеконтролю і управління місцевимиелектростанціями і іншим устаткуванням в сільському господарстві. Розподільчі силові мережі використовуються у першу чергу там, де додат- кове прокладання провідних ліній зв’язку пов’язане з труднощами і великими витратами наприклад на шахтах, нафтопромислах і т.д. Застосування ліній енергопостачання для передачі телемеханічної інформації пов'язане з деякими труднощами, головною з яких є використання додаткової спеціальної апаратури, необхідної для приєднання до ліній, що знаходиться під високою напругою. Радіолінії в даний час є єдиним засобом телемеханічного зв’язку з рухомими об'єктами, такимияк космічні кораблі, супутники. ракети, літаки, зв'язок з якими неможливий при допомозі дротів, Однакої при невдалому виборі діапазону частот надійність передачі інформації по радіолініям різко зменшується. У довгохвильовому і короткохвильовому діапазонах якість радіозв'язку значною мірою залежить від пори року і діб, метеорологічних умов, стану іоносфери і т.д. Надійнішої виявляється радіозв'язок на ультракоротких хвилях ( УКВ), тому для організації каналів зв'язку використовуються ультракороткі хвилі в діапазоні від 30МГц до 30ГГц. Хвилі у УКВ-діапазоні на відміну від довгих і коротких хвиль розповсюджуються тільки прямолінійно в межах прямої геометричної видимості. При необхідності зв'язку на великі відстані ( за межами прямої видимості застосовуютьсястанції ретрансляції або так звані радіорелейн і станції.Ряд таких станцій, що по черзі приймають, підсилюють і передають сигнали, утворюють радіорелейну лінію зв'язку. При передачі інформації порадіорелейним лініям зв'язку також використовуються методи частотного і часовогорозподілення сигналів, дозволяючи забезпечити передачу більшої кількості повідомлень.
Лекція 17 Структурні схеми телемеханічних систем. Системи телеуправління і телесигналізації. Для побудови систем ТУ-ТС використовують теорії обирання і розподілу сигналів. Сутність обирання – за допомогою умовного сигналу, наданого кожному об’єкту здійснюється вплив на возначене виконавче коло. Теорія розподілу сигналів – розглядяється питання незалежної передачі великої кількості повідомлень.
Стркутурна схема системи ТУ-ТС
Рисунок 17.1 1- пульт, який призначений для формування команд управління на конкретний об’єкт. 2- передаючий пристрій ТУ.Блок у якому команди перетворюються у серію електричних сигналів,які містять інформацію про команду і адрес КП. 3- приймач. Блок у якому розшифровується сигнал. 4- виконавчий блок. Керує конкретною схемою, яка впливає на об’єкт. 5- перетворювач ТС.Спрацьовує визначена схема сигналізації. 6- передаючий пристрій. ТС формує сигнал про стан об’єкту. 7- приймач. 8- табло. 9- об’єкт управління.
За способом розподілу сигналів системи ТУ-ТС розподіляються на 1) багатопровідні 2) частотні 3) часові Системи телевимірювання
Системи телевимірювання (ТВ) призначені для передачі результатів вимірювань контрольованих параметрів на значні відстані. Необхідність в таких системах викликана тим, що при великих відстанях передачі і використовуванні звичних електричних способів вимірювань значно зростають похибки вимірювання через непостійність параметрів лінії зв'язку. При великому числі параметрів, що підлягають контролю, звичні способи вимірювань непридатні і тому, що їх використовування зажадало б будівництво багатопровідних ліній. Звичні методи вимірювань принципово непридатні і для контролю параметрів рухомих об'єктів. Таким чином, пристрої телевимірювання забезпечують вимірювання електричних і неелектричних параметрів на великих відстанях з необхідною точністю. Датчик телевимірювання (Д) перетворить контрольовану величину А1у відповідний їй первинний сигнал (рис.17.2), передаючий пристрій (ПУ) перетворить цей сигнал у допоміжний Рисунок 17.2 сигнал у1зручний для передачі по лінії зв'язку (ЛЗ). У приймальному пристрої відбувається посилення сигналу, а потім здійснюється зворотне перетворення сигналу у2 в електричну величину А2 (струм, напруга), пропорційну у2 і реєстровану, вимірювальним пристроєм (П) (стрілочний прилад, самописець, цифровий індикатор). Через наявність перешкод в лінії зв'язку сигнал на вході приймального пристрою у2 відрізнятиметься від у1 на виході передаючого пристрою. З цієї ж причини, а також унаслідок наявності спотворень при перетвореннях показання приймального приладу А2 відрізняється від контрольованої величини А1. При створенні систем телевимірювання задача полягає у виборі такого способу передачі, при якому спотворення сигналів були мінімальними. На рисунку 1 приведена схема одноканальної системи телевимірювання. Якщо система телевимірювання забезпечує незалежну передачу сигналів від декількох джерел повідомлень — датчиків, то її називають багатоканальною. Для таких систем структурна схема доповнюється блоками формування і розділення канальних сигналів відповідно на передаючій і приймальній сторонах. Системи ТВ підрозділяють на аналогові і дискретні (кодові). Аналогові системи характеризуються безперервною залежністю між вимірюваним параметром А1 і параметром вихідного сигналу у1 (мал. 2 а). Характерною особливістю дискретних систем є здійснення в передаючому пристрої операції квантування по рівню, часто і за часом. Залежність y1 = φ(A1) для дискретних систем має ступінчастий характер. При цьому замість передачі безперервного ряду значень вимірюваної величини передається кінцеве число її рівнів, кожному з яких відповідає певна кодова комбінація.
Рисунок 17.3 Залежно від виду сигналу і способу його модуляції вимірюваним параметром розрізняють наступні види аналогових систем: а)системи інтенсивності, в яких перетворення вимірюємого параметра в сигнал виконується за допомогою амплітудної модуляції (AM); б)частотні системи, де для перетворення використовуються методи частотної (ЧМ) і частотно-імпульсної (ЧІМ) модуляції, в) часо - імпульсні системи, що використовують широтно-імпульсну (ШІМ) і фазо-імпульсну (ФІМ) модуляції. У системах інтенсивності для переносу інформації використовується модульований по амплітуді постійний струм. Ці системи застосовуються при порівняно невеликих відстанях передачі (до 10 км при повітряних і 25 км при кабельних лініях зв'язку), оскільки при великих відстанях зростають похибки від зміни параметрів лінії зв'язку. Системи інтенсивності підрозділяють на небалансі, балансні і логометричні. На рис.(17.2,а) приведена схема небалансної системи з датчиком (ПД) потенціометра, який з’єднаний з первинним вимірювачем (ПВ). Залежно від кута повороту α рухомої частині ПВ змінюється напруга, що підводиться до лінії. Для зменшення впливу на точність телевимірювання зміни опору лінійних дротів Rл, що викликаються змінами температури, в лінійний ланцюг включають баластний опір Rб з матеріалу з малим температурним коефіцієнтом опору. Звичайно Rб>10R. В якості вимірюємого приладу (ПП) служить магнітоелектричний гальванометр звичної будови. Відхилення приймального приладу (струм І) пропорційне куту повороту α рухомої частини ПП. Основними джерелами похибок в системі є зміна напруги джерела живлення U і зміна опору ізоляції між лінійними дротами. Балансні і логометричні системи дозволяють значно підвищити точність телевимірювання. Логометрична система ТВ (рис.17. 2 б) складається з датчика (ПД) потенціометра, движок якого пов'язаний з рухомою системою первинного вимірювача (ПВ), трьохпровідної лінії зв'язку (ЛЗ) (її середній дріт підключений до джерела напруги U) і логометра (Л). При змінах вимірюваної величини змінюється співвідношення опорів плечей r1 і r2 потенціометра, а отже, і співвідношення струмів І1і І 2 в лінійних дротах. Ці зміни вимірюються на приймальній стороні магнітоелектричним логометром, свідчення якого пропорційні відношенню струмів в рамках 1 і 2. При цьому зміна напруги джерела живлення U не впливає на показання логометра і, отже, на точність вимірювання.
Імпульсні системи телевимірювання. У цих системах сигнал перетворюється у визначену послідовність імпульсів. - частотоімпульсний метод, величина, яка вимірюється перетворюється у пропорційне число імпульсів. - часоімпульсний метод, величина, яка вимірюється пропорційна продовженості імпульсів. - кодоімпульсний метод, величина, яка вимірюється перетворюється у визначену послідовність імпульсів.
Лекція 18 МП і мікро-ЕОМ у структурі обчислювальної техніки. Мікропроцесори і мікроЕОМ — масова продукція електронної промисловості. Знання основ мікропроцесорної техніки необхідні інженерам будь-якого профілю. Мікропроцесори (МП) знайшли широке застосування в сучасних ОС та радіоелектронних пристроях (РЕП), технологічних системах контролю, гнучких автоматизованих та інших виробництвах. Використання МП сприяло значному підвищенню продуктивності праці, поліпшенню якості апаратури різного призначення. Завдяки застосуванню МП і мікроЕОМ у технічних системах розширилися функціональні можливості апаратури, підвищились її надійність і стабільність функціонування, поліпшилась якість обробки інформації. Перспективи та можливості застосування МП і мікро-ЕОМ в обчислювальних системах ще повністю не розкриті. Постійно вдосконалюються технологія та архітектура МП. Так, розрядність сучасних однокристальних МИ досягає 64біт. Для створення системного програмного забезпечення поширена мова асемблера, але щодо продуктивності праці програмістів задачі обробки даних розв'язуються за допомогою мов високого рівня. Тому сучасним інженерам необхідні знання в галузі як архітектури МП, так і програмування радіотехнічних задач на мовах різних рівнів. До основних понять мікропроцесорної техніки належать: «мікропроцесор», «ІС», «ІМС», «ВІС», «НВІС», «мікропроцесорний комплект ВІС», «мікропроцесорний пристрій», «мікропроцесорна система», «мікропроцесорна техніка», «мікроЕОМ» (загального призначення та спец
|
||||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 1228; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.134 (0.02 с.) |


 Поперечний переріз магнітопроводу сельсина з явновираженими полюсами на статорі показаний на мал. 15.2. Полюси статора забезпечені полюсними наконечниками з кутом обхвату 120—1300. Величина повітряного зазору зростає до країв полюсного наконечника. Завдяки цьому форма кривої розподілу магнітного потоку в повітряному зазорі наближається до синусоїди. Для ослаблення впливу зубцових гармонік пази ротора скошені на одне зубцове ділення. Зменшення моменту тертя в сельсинах досягається застосуванню шарикопідшипників. Щітки виконуються у вигляді металевих пластинок з срібними напайками в місцях зіткнення з кільцями. Магнітна система сельсинів набирається з листів електротехнічної сталі.
Поперечний переріз магнітопроводу сельсина з явновираженими полюсами на статорі показаний на мал. 15.2. Полюси статора забезпечені полюсними наконечниками з кутом обхвату 120—1300. Величина повітряного зазору зростає до країв полюсного наконечника. Завдяки цьому форма кривої розподілу магнітного потоку в повітряному зазорі наближається до синусоїди. Для ослаблення впливу зубцових гармонік пази ротора скошені на одне зубцове ділення. Зменшення моменту тертя в сельсинах досягається застосуванню шарикопідшипників. Щітки виконуються у вигляді металевих пластинок з срібними напайками в місцях зіткнення з кільцями. Магнітна система сельсинів набирається з листів електротехнічної сталі. ,
, Цей струм, взаємодіючи з потоком Ф0, який утворюється роторною обмоткою сельсина-приймача, викликає появу обертаючого моменту, значення і напрям якого залежать від значення і напряму струму і. Під дією обертаючого моменту ротор сельсина-приймача обернеться на кут α і займе положення, при якому різниця електрорушійних сил ΔЕзнову буде дорівнювати нулю і кут розузгодження Θ знов стане рівним нулю.
Цей струм, взаємодіючи з потоком Ф0, який утворюється роторною обмоткою сельсина-приймача, викликає появу обертаючого моменту, значення і напрям якого залежать від значення і напряму струму і. Під дією обертаючого моменту ротор сельсина-приймача обернеться на кут α і займе положення, при якому різниця електрорушійних сил ΔЕзнову буде дорівнювати нулю і кут розузгодження Θ знов стане рівним нулю.






