Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Електромагнітні (індуктивні, трансформаторні, магнітопружні, і індукційні датчики)Содержание книги
Поиск на нашем сайте
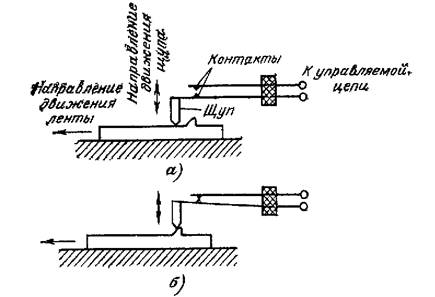
Параметричні датчики. Датчики активного опору Контактні датчики Контактні датчики Контактним датчиком називається датчик, у якому механічне переміщення перетвориться в замкнутий або розімкнутий стан контактів, що управляють однієї або декількома електричними ланцюгами. При замиканні контактів активний опір між ними змінюється від нескінченності до невеликого значення, а при розмиканні контактів він змінюється в зворотному напрямку, тобто від невеликого значення до нескінченності. На рис. 3.1 зображений найпростіший контактний датчик, контакти якого замикаються або розмикаються при переміщенні щупа, що здійснює контроль товщини стрічки, що прокочується. Особливістю виміру за допомогою контактних датчиків є дискретність виміру, тому що контакти замикаються і розмикаються при визначеному положенні щупа.
Рисунок 3.1 Найпростіший контактний датчик. а-контакти розімкнені, б-контакти замкнені.
Контакти є самою важливою частиною датчика. Надійність і точність роботи датчика у великому ступені залежать від матеріалу і якості виготовлення контактів. Чим менше потужність, що розривається контактами датчика, тим менше відбувається обгорання контактів і тем вище точність роботи датчика. Матеріал для контактів вибирають, з огляду на умови роботи датчика, а саме: напруга, подавана на контакти, потужність керованого ланцюга, контактний тиск і т.п. У якості матеріалу для контактів застосовують срібло, вольфрам, золото, платину, сплави платини з іридієм. Контактні датчики широко застосовуються в машинобудівній промисловості при автоматичному контролі і сортуванню по лінійних розмірах виробів. Вони дозволяють сигналізувати переміщення з точністю до 1-2 мкм. Контактні датчики можуть включатися безпосередньо в керований ланцюг або за схемою “сіткового контакту”. До пререваг цих датчиків відносяться: простота конструкції і порівняно висока точність до 1-2 мкм, а до недоліків—обгорання контактів (періодично доводиться зачищати контакти) і необхідність під регулювання контактів.
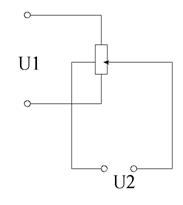
Потенціометричні (реостатні) датчики Реостатний перетворювач становить регульований дротовий резистор з рухомими контактами, що змінює своє положення залежно від зміни вихідної величини.
В залежності від характеру зміни опору, розрізняють лінійні і функціональні потенціометричні датчики. Схеми вмикання
Рисунок 3.2 Схеми вмикання потенціометричного датчика
Мостові схеми звичайно мають малу нелінійність характеристики, тому знаходять широке застосування. Потенціометричні датчики складаються з проводу намотаного на каркас. Матеріал проводу: манганін, константан або фехраль. Повзунок виготовляють або зі сплаву платини з іридієм, або з срібла. Каркас виготовляють з текстоліту,пластмаси або алюмінію. Переваги:простота, невеликі маса та габарити, можливість живлення постійним і змінним струмом, стабільність. Недоліки:наявність рухомого контакту, низька чутливість. Застосовуються для вимірювання тиску рідин та газів, рівня рідини,координат, переміщень, лінійних прискорень.
Тензометричні перетворювачі Принцип дії цього датчика – використання тензоефекту. При розтягуванні провідника змінюється довжина, переріз(тобто активний опір), струм і напруга у схемі. Застосовується для вимірювання невеликих переміщень деформації а також інших явищ які пов’язані з деформацією. Тензорезистор характеризується коефіцієнтом тензочутливості Коефіцієнт К залежить від властивостей матеріалу тензорезистору,якості основи, на яку наклеюється тензорезистор і типу клею. На практиці широко застосовуються дротяні, фольгові і напівпровідникові тензорезистору. Дротяні тензорезистори найбільш прості і являють собою спіраль (решітку),яка складається з декількох витків проволоки діаметром 0.02 – 0.05мм, яка наклеєна на спеціальну паперову або лакову (плівкову) основу. Зверху спіраль закривають таким же папером або плівкою. Матеріал проволоки - константан, манганін,ніхром, та інші матеріали, які мають високий коефіцієнт тензочутливості К,і низький температурний коефіцієнт опору.
Позначення на схемі
Рисунок 3.3
Фольгові тензорезистори мають решітку з тонких полосок фольги прямокутного перерізу, які наносяться на лакову основу. Напівпровідникові тензорезистори виготовляють з германія, кремнію, арсеніду галію, та інших матеріалів,які мають сильний тензоефект. Вони мають велику перевагу перед дротяними та фольговими тензорезисторами: Коефіцієнт тензочутливості К досягає 100-120 (у 50 – 60 разів вище). Ї х недоліком є низька механічна міцність і нелінійність характеристик.
Найчастіше тензометричні датчики вмикають по мостовій схемі.
Тип пружного елемента тензорезисторного датчика (балка,скоба,мембрана, пружина..) визначають його призначення а властивості деформуватися і частотні властивості – чутливість датчика і його застосування для вимірювання статичних або динамічних процесів. Переваги: невеликі габарити,маса,простота. Відсутність впливу на вимірювальний параметр. Недоліки: низька чутливість, вплив температури,низька механічна міцність. Терморезистори Терморезистори – це перетворювачі в яких зміна температури приводить до зміни електричного опору (бувають провідникові і напівпровідникові). Термометр опору виконується у вигляді тонкої металевої проволоки, біфілярно намотаної на непровідний і термостійкий каркас, який розташований у корпусі. Звичайно застосовують мідні і платинові термометри. Мідні термометри мають лінійну характеристику і працюють у діапазоні -500 ÷ + 1800(похибка 1%); платинові мають деяку нелінійність і працюють у діапазоні -2000 ÷ + 6050 (похибка 0.1 %) R=Rо+[1+α(t-tо)] Термометри опору звичайно вмикають по мостовій схемі.
Похибки термометрів опору викликані відхиленням його опору при 0°С і температурної характеристики від градуіровочної таблиці; нестабільністю опору сполучних дротів; нагрівом термометра вимірювальним струмом. Гранична довжина лінії зв'язку з термометрами опору визначається опором дроту (не більш 2,5 Ом). Для перетворення зміни опору термометра в зміну напруги Uxтермометр t° включається в неврівноважену мостову схему,живлення якої відбувається від стабільного джерела напруги постійного струму. Включення в мостову схему термометра здійснюється по трьохпровідній схемі з метою зменшення похибки R1—R3— резистори моста, а Rп — підстроїчні резистори, опори яких в сумі з опором лінії зв'язку підганяються до певної величини (звично 2,5 Ом) Переваги стабільність, лінійність характеристик, простота виготовлення. Недоліки теплова інерційність. Термістори Термістори найчастіше використовуються для вимірювання температури на автомобілях. При зміні температури змінюється електричний опір термистора і вихідний сигнал датчика у вигляді струму або напруги. В основному термистори мають негативний температурний коефіцієнт опору. Термістори, використовувані в автомобільній промисловості, мають опір від декількох кілоом при 0 до сотень Ом при 100 °С. Такий динамічний діапазон зміни опору вважається задовільним для всіх автомобільних потреб. Термістори виготовляються з напівпровідників, наприклад, окислу нікелю або окислу кобальту. Їх формують у гранули стержні або пластини. При збільшенні температури в напівпровіднику росте кількість вільних електронів і зменшується електричний опір. Система вимірювання температури на основі термистора має високу чутливість,(-40 ….+8000С) оскільки відносно невеликі зміни температури приводять до значних змін опору.
На показана проста схема перетворювача температури в напругу. Напруга живлення повинна бути стабільною, робочий струм не повинен нагрівати термістор, інакше виникають додаткові похибки. Температура термістора збільшується на 1 °С на кожні 1,3 мВт розсіюваної потужності.
Лекція 4 Параметричні датчики реактивного опору Ємнісні датчики Ємнісний перетворювач становить конденсатор (як правило, плоский, рідше — циліндричний), ємність якого змінюється залежно від змін вимірювальної величини. Як відомо, ємність плоского конденсатора виражається формулою С = (εS)/d, де ε — діелектрична проникність середовища, що заповнює простір між обкладинками конденсатора; s — робоча площа обкладинок; d — віддаль між ними. Отже, зміна ємності такого перетворювача може бути наслідком змін ε, s або d. Найбільшого поширення дістали плоскі ємнісні перетворювачі, вхідною величиною яких є переміщення — зміна проміжку б між електродами.Верхній електрод підключено до вимірювальної схеми екранованим проводом для того, щоб зміни ємності цього проводу не виливали на результат вимірювання. Ємнісний перетворювач, робота якого базується на зміні діелектричної проникності середовища, зображено на рисунку 4.4 б). Між його обкладинками проходить стрічка деякого діелектрика, діелектрична проникність якої змінюється (наприклад, під впливом вологості).
Рисунок 4.4 Ємнісні перетворювачі
Ємнісні перетворювачі можуть бути виконані з циліндричними електродами. Застосування циліндричного ємнісного перетворювача длявимірювання рівня рідини показано на рисунку 4.5 а) (передбачається, що рідина неелектропровідна, інакше електроди слід електрично ізолювати від рідини, як на рисунку 4.5 б)
Рисунок 4.5 Датчик ємності із змінною площиною пластин є повітряним конденсатором з декількома паралельно розташованими пластинами. При цьому одна частина пластин нерухома (звично через одну пластину), а інша може повертатися на деякий кут. Такі конденсатори широко застосовуються в радіотехніці. У схемах автоматики їх використовують для вимірювання кутових переміщень. При повороті рухомих пластин змінюється значення активної площі пластин конденсатора, а значить, і значення ємності. Таким чином, ємність датчика пропорційна куту повороту валу задаючого пристрою, з яким пов'язані рухомі пластини датчика ємності.
Рисунок 4.6
Переваги: висока чутливість,малі габарити та маса, мала інерційність. Недоліки: великий внутрішній опір, вплив на роботу датчика паразитних ємностей та температури, необхідність високочастотного джерела живлення.
Ємнісні датчики тиску У таких датчиках одна з обкладинок конденсатора є діафрагмою, яка прогинається при зміні тиску. Номінальна ємність конденсатора визначається залежністю С = kεS/d, де S — площа обкладинок,ε— діелектрична постійна, d — відстань між обкладаннями, k— коефіцієнт, залежний від конструкції датчика. Як чутливі елементи використовуються кремнієві або керамічні діафрагми. Лекція 5 Генераторні датчики Термопари У термоелектричних перетворювачах використовується термоелектричний ефект, відкритий у 1821 р. німецьким фізиком Томасом Іоганном Зеебеком (ефект Зеебека), який уперше створив термопару і застосував її для вимірювання температури. Відомо, що при зіткненні двох різних металів між ними виникає контактна різниця потенціалів ек, значення якої залежить від природи металів та від температури у точці зіткнення (рис. 5.1, а). Проте, якщо з двох різнорідних металів утворити замкнене електричне коло (рис. 5.1, б), то при рівності температур t1 та t2 в обох точках зіткнення струм у цьому колі не виникне, оскільки обидві різниці потенціалів ек1 та ек2 взаємно зрівноважаться, тому результуюча електрорушійна сила дорівнюватиме нулю. Якщо ж температури t1 і t2 неоднакові, то ек1≠ек2 і в електричному колі виникає певна різницева електрорушійна сила, так звана термоелектрорушійна сила et (при t1 > t2 et = eк1 — ек2). На цьому базується робота термоелектричного перетворювача, який називають також термопарою: дві дротини, виготовлені з різних металів або їх сплавів, зварені між собою з одного кінця (рис. 5.1, в). Якщо місце їх з'єднання нагріти, то між вільними кінцями дротинок виникне термоелектрорушійна сила et. При незмінності температури t2 величина et буде однозначною функцією від температури t1 робочого кінця термопари. Для виготовлення позитивних полюсів використовують мідь та сплави хромель (Cr+Ni) або платинородій (Pt+Rh); для виготовлення негативних полюсів — сплави константан (Cu+Ni+Mn), копель (Cu+Ni), алюмель (Al+Si+Mg+Ni). З цих матеріалів виготовляють термопари: мідь — константан (М, до +350 °С), хромель — копель (ХК, від —50° до +600 °С); хромель — алюмель (ХА, від —50° до +1000 °С); платинородій — платина (ПП, від —20° до+1300 °С).
Рисунок 5.1 Переваги: простота,різноманітні конструкції Недоліки: інерційність, наявність паразитних термо- ЕРС П’єзоелектричні датчики П'єзоелектричні датчики для вимірювання зусиль є кварцовою пластиною. З двох сторін її напилені або приклеєні струмопровідним клеєм елек троди, з яких знімається вихідна напруга (рис. 5.2).
Рисунок 5.2 П’єзоелектричний датчика Два електроди і кварцовий діелектрик утворюють конденсатор, на електродах якого присутні електричні заряди Q, що виникають унаслідок прямого п'єзоелектричного ефекту при стисненні кварцової пластини силою Р. Електричний заряд пропорційний стискаючій силі Р: Q = αP, де α — коефіцієнт пропорційності, який називається п’єзомодулем.
Під дією сили Р, що змінюється, на електродах датчика з'являється вихідна напруга
де Сд — ємність датчика; См— ємність монтажу.
Вихідна напруга датчиків змінюється від одиниць мілівольт до одиниць вольт. Підсилювач, що підключається до вихідних затискачів п’єзодатчика, повинен мати великий вхідний опір. Великою перевагою п'єзоелектричних датчиків є їх безінерційність, а також висока чутливість. Їх основний недолік – низька механічна міцність. Застосовуються п’єзодатчики для вимірювання сил, тиску, вібрацій і т.д.
Фотоелектричні датчики У фоторезисторах використовується явище внутрішнього фотоефекту, вперше відкритого в 1873 p., потім детально дослідженого російським фізиком В. О. Ульяніним у 1888 р. При освітленні х = Ф опір у=Rф напівпровідникового шару між двома гребінчастими електродами (рис. 5.3, а) зменшується. Варіант конструкції показаний на рис. 5.3, б (1— віконце в корпусі, 2— світлочутлива напівпровідникова пластина, 3—контактні виводи).
Рисунок 5.3 Фотодіоди — це високочутливі елементи для перетворення світлових сигналів на електричні. Будова одного з видів фотодіодів показано на рис. 5,4, а (1— скляна лінза, 2— пластинка германію,3— контактні виводи). Можливі два режими роботи фотодіодів. У першому з них (рис. 5.4, б) зовнішнього джерела живлення немає, фотодіод працює як вентильний фотоелемент. Під впливом світла в пластинці напівпровідника вивільняються фотоелектрони; р— n- перехід дає їм змогу проходити лише в напрямі від рдо n. Внаслідок цього звільнені світлом фотоелектрони можуть переміщуватися лише в одному напрямі, створюючи в електричному колі струм, значення якого залежить від освітленості. Найбільші прирости фотоструму досягаються при невеликих освітленостях. Другий режим (рис. 5.4, в) характеризується наявністю зовнішнього джерела напруги. У темряві через фотодіод протікає зворотний струм, який залежить від напруги джерела живлення. При освітленні фотодіода до цього зворотного струму додається фотострум, що зростає приблизно пропорційно освітленості.
Тахогенератори Для вимірювання швидкості обертів двигуна. найчастіше використовується асинхронний тахогенератор змінного струму.
Рисунок 5.5 Тахогенератор змінного струму Лекція 6 Призначення і характеристики підсилювачів.
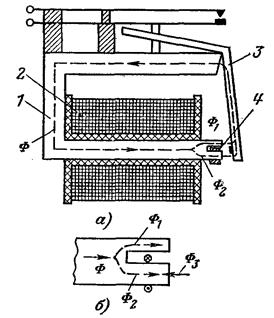
Призначення, класифікація і основні характеристики підсилювачів У автоматиці вихідний сигнал датчика використовуєтьсядля приведення в дію виконавчого пристрою автоматичної системи. Проте дуже часто потужності вихідного сигналу датчика недостатньо, і її тому необхідно підсилювати. Ефект підсилення по потужності здійснюється в підсилювачах за рахунок енергії допоміжного джерела. Залежно від виду допоміжного джерела енергії підсилювачі можна розбити на наступні групи: електричні, гідравлічні, пневматичні, і комбіновані. Підсилювачі діляться на однокаскадні і багатокаскадні, а також на підсилювачі із зворотними зв'язками і без зворотних зв'язків. Застосовуються найчастіше електричні підсилювачі, які, можна розділити надвівеликі підгрупи: підсилювачі, що не містять рухомих частин (електронні, напівпровідникові, тиратронні, магнітні), і підсилювачі, що містять рухомі частини (електромашинні) До основних характеристик підсилювачів відносяться: коефіцієнт підсилення; потужність, яка споживається від допоміжного джерела енергії; вихідна потужність; коефіцієнт корисної дії (ККД); швидкодія (значення постійної часу); вхідний і вихідний опори підсилювача власні шуми підсилювача (поява вихідної величини при вхідній величині, рівній нулю). Коефіцієнт підсилення наприклад, для електричних підсилювачів показує, в скільки разів потужність, струм або напруга на виході підсилювача більше потужності,струму або напруги на його вході. Потужність, яка споживається від допоміжного джерела енергії, вихідна потужність і ККД визначають енергетичні властивості підсилювача. Швидкодія підсилювачів оцінюється по їх динамічним характеристикам (часовим або частотним). Підсилювачі магнітні, електромашинні, гідравлічні і пневматичні мають меншу швидкодію, ніж електронні і напівпровідникові підсилювачі. Наприклад, значення постійної часу електронного підсилювача рівне 10-6 —10-10 с, а пневматичного підсилювача - 1 — 10-1 с. Вхідний і вихідний опори мають місце тільки для електричних підсилювачів. Ці опори необхідно враховувати при узгодженні підсилювачів) з попередніми і подальшими елементами автоматичної або телемеханічної системи. Напівпровідникові, магнітні і електромашинні підсилювачі мають менше значення вхідного опір ніж електронні підсилювачі. Вхідний опір електронного підсилювача рівний 106—1012 Ом, а вхідний опір напівпровідникового підсилювача— 102—105 Ом. Підсилювачі з низьким вхідним опором не можна використовувати, наприклад, для посилення сигналів ємнісних датчиків, фотоелементів, що мають великий вихідний опір. Область застосування різних підсилювачів У автоматиці застосовуються електронні підсилювачі двох видів: підсилювачі з безпосереднім зв'язком між каскадами (або підсилювачі постійного струму) і підсилювачі змінного струму. Підсилювачі постійного струму При використовуванні підсилювачів постійного струму (УПС) слід пам'ятати, що вони мають великий дрейф нуля (явище повільної зміни вихідної напруги підсилювача з часом). Основними причинами дрейфу нуля є: зміна напруги живлення підсилювача і розжару ламп; зміна емісії катодів ламп і зміна характеристик ламп з часом. Для зменшення дрейфу нуля застосовують модулятори (і демодулятори). Сигнал помилки постійного струму за допомогою модулятора перетворюють на змінну напругу, яка потім посилюється і демодулюється, тобто посилена змінна напруга перетвориться в постійну. Підсилювачі змінного струму в порівнянні з УПС мають наступні переваги: відсутність дрейфу нуля, простота схеми, мала маса і можливість використовування виконавчих пристроїв змінного струму. Електронні підсилювачі частіше застосовуються в слідкуючих системах, оскільки перед іншими видами підсилювачів вони мають ряд переваг: можливість отримання великих коефіцієнтів підсилення, велика швидкодія,підсилення дуже малих сигналів, відсутність рухомих частин, висока стабільністьхарактеристик, можливість безпосереднього узгодження з іншими видами підсилювачів, широкий діапазон підсилюваних частот. До недоліків електронних підсилювачів можна віднести невелику механічнуміцність, малунадійність, малийчас служби, низький ККД. Як правило, потужність електронних підсилювачів складає від десятих часток вата до декількох десятків ватів. У автоматиці, наприклад в слідкуючих системах, все частіше стали застосовуватися напівпровідникові підсилювачі які мають наступні переваги: високу надійність і довговічність, вібро - і ударостійкість, малірозміри і масу, миттєву готовність до роботи,економічність До недоліків напівпровідникових підсилювачів відносяться: велика розбіжність параметрів і характеристик від температури навколишнього середовища, малий вхідний і великий вихідний опори. Для побудови напівпровідникових підсилювачів використовуються напівпровідникові тріоди і тиристори. Звично напівпровідникові тріоди і тиристори виготовляються з германію або кремнію з відповідними домішками. Напівпровідникові підсилювачі виконуються потужністю від десятих часток вата до декількох десятків ватів. Тиратронні підсилювачі застосовуютьсяв автоматичних системах регулювання. Технічні характеристики цих підсилювачів багато в чому співпадають з технічними характеристиками електронних підсилювачів. Основною перевагою тиратронних підсилювачів в порівнянні з електронними підсилювачами є великавихідна потужність, яка виходить за рахунок великого анодного струму. Анодний струм для сучасних тиратронів коливається від декількох сотень міліампер до декількох сотень ампер. Збільшення анодного струму тиратрона можливе через наявність іонізованого газу в просторі між анодом і катодом. До недоліків тиратронних підсилювачів відносяться: велика розбіжність параметрів і невелика чутливість, необхідність попереднього прогрівання катода тиратронадо подачі живлення на анод (час прогрівання катода може складати від 10 з до 40 мін). Для побудови тиратронних підсилювачів застосовуються паро або газонаповнені три- або чотириелектродні лампи. В даний час широко застосовуються в автоматиці комбіновані підсилювачі, які можуть складатися з двох-трьох або трьох-чотирьох типів підсилювачів. Такі комбінації дають можливість використовувати переваги кожного типу підсилювача. При виборі комбінованого підсилювача необхідно враховувати наступні основні показники: термін служби, надійність в роботі, миттєву готовність до роботи, масу і габарити, вихідну потужність для управління виконавчим двигуном чутливість і коефіцієнт підсилення підсилювача, вартість, потужність,яка споживається споживачем. Реле змінного струму Реле змінного струму спрацьовують при подачі на їхні обмотки змінного струму визначеної частоти. Ці реле частіше усього застосовуються в тих випадках, коли основним джерелом енергії є мережа змінного стуму. Будова реле змінного струму нагадує будову реле постійного струму, тільки осердя і якір реле змінного струму виготовляються з листової електротехнічної сталі, щоб зменшити втрати на гістерезис і вихрьові струми. Слід зазначити, що реле змінного струму застосовуються в техніці рідше, ніж реле постійного струму, тому що мають менше електромеханічне зусилля і менше чутливі в порівнянні з останніми. Вони складніші і дорожчі, тому що осердя і якір їх набираються з окремих листів; крім того, необхідно застосовувати спеціальні міри для усунення вібрацій якоря, що викликані тим, що електромеханічне зусилля проходить через нуль двічі за період живлячої напруги. Вібрація якоря - небажане явище, тому що може привести до обгорання контактів і розриву керованого кола. Для зменшення вібрацій якоря в техніці застосовуються спеціальні конструктивні заходи, наприклад застосування утяжеленого якоря двухфазного реле і коротко–замкненого витка. На рис. 7.4, а показана конструкція реле змінного струму з короткозамкненим витком або реле з “роздвоєним” полюсом, що частіше усього застосовується у пристроях автоматики. Один кінець сердечника реле 1 расщеплен на дві частини, причому на одну частина надітий короткозамкнений виток 4 (один або декілька витків мідного дроту), що виконує роль екрана. При подачі змінної живлячої напруги на обмотку реле 2 по осердю проходить змінний магнітний потік Ф, що у кінця осердя розгалужується. Частина магнітного потоку Ф1 проходит через неекрановану половину кінця осердя, а інша частина магнітного потоку Ф2 проходить через екрановану половину кінця осердя. Магнітний потік Ф2 наводить у короткозамкненому витку ЕРС,
Рис. 7.4. Реле змінного струму з короткозамкненим витком. а—конструкція; б—напрямок магнітних потоків у розчепленій частині осердя
що створює струм, що у свою чергу викликає магнітний потік Ф3, спрямований назустріч потокові Ф2 (рис. 7.4,б). У результаті потоку Ф3 потік Ф2 відстає по фазі що до потоку Ф1 на кут 60 – 80°. Тому сумарне електромеханічне зусилля Рем при подачі на обмотку живлячої напруги ніколи не дорівнює нулю, тому що обидва потоки (Ф1 і Ф2) проходять через нуль у різні моменти часу, тобто коли один із потоків, наприклад Ф1 проходить через нуль, іншій Ф2 має визначене значення й утримує якір 3 у притягнутому положенні, В даний час промисловість країни випускає багато типів реле змінного струму.
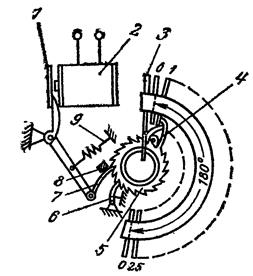
Розподільники У автоматиці, телемеханіці, обчислювальній техніці і зв'язку часто необхідно послідовно підключати керовані (виконавчі) кола. Для виконання зазначеної задачі застосовуються електромеханічні, релейні й електронні розподільники. Електромеханічні розподільники можуть приводитися в рух електромагні-тами постійного струму або електродвигунами. У техніці найбільше поширення отримали розподільники, що приводяться в рух електромагнітами постійного струму. Такі розподільники в літературі частіше усього називаються кроковими шукачами з електромагнітним приводом. Кроковий шукач так само, як і реле, є пристроєм дискретної дії. Він містить щітки (рухливі контакти), що під дією керуючого сигналу, подаваного на обмотку електромагніта, здійснюють послідовне переключення керованих кіл. У кожного крокового шукача є також і нерухомі контакти, що розташовуються по дузі окружності в декілька контактних рядів, створюючи при цьому контактні поля, причому кожний контактний ряд має свою щітку. Контактні поля виконуються не на повну окружність, а на половину (180°) або третина (120°) окружності. Число контактів на однім полі буває від 11 до 50, а число контактних рядів від 2 до 8. Швидкість переключення щіток складає від 1 до декількох десятків кроків у секунду. Вона обмежена інерційністью електромагніта. Рекомендуєма швидкість руху щіток – 10-11 кроків у секунду. Потужність, споживана електромагнітом, дорівнює 50-70 Вт. За принципом дії крокові шукачі діляться на два види: прямої дії і зворотної. Як приклад на рис. 4-9 показана спрощена конструкція крокового шукача зворотної дії, принцип роботи якого полягає в наступному. Переміщення щітки 4 по нерухомих контактах 3 здійснюється за рахунок поворотної пружини 9, що має достатню пружність для створення зусилля, яке необхідно для пересування щітки. При надходженні керуючого сигналу на обмотку електромагніта 2 якір 1, долаючи дію поворотної пружини 9, притягуються і
собачка 7 сковзає по зубцях храпового колеса 5, не входячи з ним у зачеплення. При цьому в пружині 9 запасається енергія. При знятті керуючого сигналу пружина 9, переміщуючи собачку 7, повертає завдяки упору 8 храпове колесо 5 на один зубець і щітка 4 переходить на наступний нерухомий контакт 3, переключаючи послідуюче кероване коло. У момент тяжіння якоря храпове колесо 5 і щітка 4 утримуються стопорною собачкою 6. Якщо в кроковому шукачі зворотної дії переключення керованого кола відбувається на початку паузи (після зняття керуючого сигналу), то в кроковому шукачі прямої дії переключення керованого колоа здійснюється на початку подачі керуючого сигналу, тобто щітка 4 пересувається в той момент, коли якір 1 притягається до сердечника електромагніту. В даний час найбільше поширення одержали мікроконтролери. Лекція 8 Виконавчі пристрої. Електричні виконавчі пристрої. Виконавчі пристрої і елементи застосовуються для безпосереднього впливу на об’єкт управління.. Вони діляться на: електричні, гідравлічні, пневматичні, механічні і комбіновані. Виконавчі пристрої повинні задовольняти наступним вимогам 1.Їх потужність повинна задовольняти вимоги для приведення до руху об’єкту регулювання. 2. Їх статичні характеристики повинні бути лінійними. 3.Зона нечутливості повинна бути мінімальна. 4. Повинна бути достатня швидкодія. 5. Регулювання вихідної величини повинно бути простим і економічним.
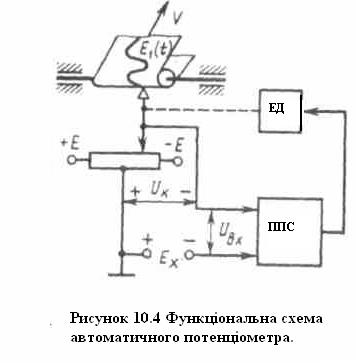
Автоматичний потенціометр
На рисунку 10.4 показана функціональна схема автоматичного потенціометра для вимірювання ЕРС (Ех). Для контуру з напругою Uк, Ех, Uвхможна записати Ubx = Ex—Uk. Якщо Uk≠Ех, то на вході підсилювача постійного струму (ППС) буде напруга UBX, яка підсилюється і подається на електродвигун (ЕД). Вал двигуна переміщає движок потенціометра і пов'язане з ним пір’ячко самописного приладу. При переміщенні движка потенціометра змінюється компенсуюча напруга UK. Коли вона стане рівним Ех (тобто EX=UK ), то напруги на вході і на виході підсилювача постійного струму будуть рівні нулю. Отже, двигун зупиниться. При Eх>Uк і Uвх>0 електродвигун переміщатиме движок і пір’ячко самописного приладу, наприклад, управо, а при Ех< UK — вліво, поки знову не вийде рівністі EX=UK. Таким чином, пір’ячко самописного приладу стежитиме за Ех, тобто за вимірюваною ЕРС. При переміщенні паперової стрічки з постійною швидкістю v пір'ячко викреслюватиме на ній графік зміни ЕРС в часі. Потенціометр (змінний резистор) живіться від джерела Е.
Автоматичний потенціометр застосовується для запису ЕРС термопар. У них використовується підсилювач з перетворенням сигналу, що поступає на обмотку управління двофазного електродвигуна. Обмотка збудження двигуна підключається до мережі змінного струму, напруга якої використовується як опорне для перетворювача. У автоматичному потенціометрі застосовується компенсаційна вимірювальна схема, яка дозволяє вимірювати Ех без споживання потужності від джерела вимірюваної ЕРС, що є перевагою порівняно з іншими вимірювальними схемами. Недолік компенсаційної схеми — необхідність застосування еталонного джерела живлення Е.
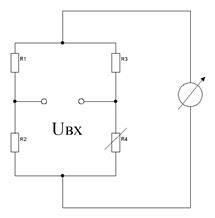
Автоматичним мостом називається пристрій, що служить для автоматичного вимірювання і реєстрації опорів. Вимірюваний опір Rx, який є вихідною величиною параметричного датчика (наприклад, тензодатчика), включається в міст, який автоматично балансується (рисунок 10.5). При збільшенні опору датчика Rx виникає напруга розбалансу Uвх, яка підсилюється підсилювачем змінного струму П і подається на обмотку управління двофазного електродвигуна ЕД. Двигун переміщає движок потенціометра і пір'я самописного приладу управо, поки не відновиться баланс моста. Тоді Ј/Вх = 0 і двигун зупиняється. При зменшенні Rx відбувається зворотний розбаланс моста, фаза змінюється на 180°, що викликає обертання двигуна в іншу сторону. Движок і пір'я переміщаються вліво, поки знову не наступить баланс моста. Таким чином, пір'я самописця стежить за змінами опору датчика. При цьому воно малює на паперовій стрічці графік Rx—f(t). f Автоматичні мости і потенціометри, що є системами автоматичного контролю, відносяться до стежачих систем автоматичного регулювання, оскільки в них виробляється сигнал помилки, який відпрацьовується системою.
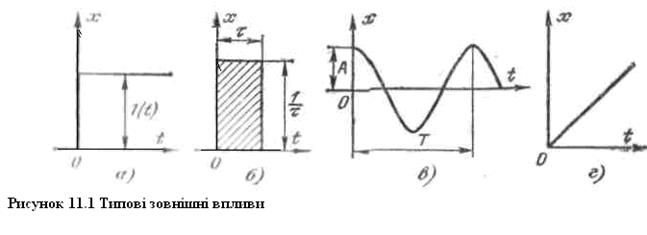
Рисунок 10.5 Схема автоматичного мосту Призначення і класіфікація АСР Зовнішні збурення і їх види Зміна режиму роботи АСР може відбуватися за рахунок зовнішніх дій, причому вид цих дій може бути дуже різноманітним. При аналізі і синтезі динамічних процесів в АСР, як зовнішні дії розглядаються такі типові функції, які математично легко можна описати. Як вказані функції застосовуються: одиничний стрибок (рис. 11.1, а ); одиничний імпульс (рис.11.1, б); гармонійний (синусоїдальний) вплив (рис.11.1 в) і вплив, що безперервно зростає з постійною швидкістю (лінійно) (рис.11.1 г).
Структурна схема АСР. Основні елементи На рисунку 11.2 показана узагальнена структурна схема АСР. Автоматична система регулювання складається з автоматичного регулятора АР, здійснюючого автоматичне регулювання, і об'єкту регулювання ОРз регулюючим органом РО. До складу автоматичного регулятора АРвходять наступні основні пристрої: задаючий, вимірювальний, порівняльний, перетворюючий і виконавчий. Порівняльний пристрій ПП порівнює задане для даного моменту значення x(t) регульованого п
|
||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 1250; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.89.181 (0.021 с.) |

 Не реверсивна Реверсивна Мостова
Не реверсивна Реверсивна Мостова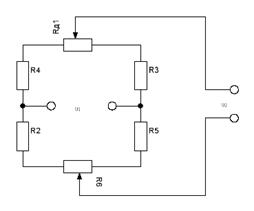

 .
.








 -
-

 Рисунок 5.4
Рисунок 5.4 Тахогенератор змінного струму зображено на рис. 5.5 (1 — феромагнітний магнітопровід статора, 2 — нерухомий магнітопровід ротора, 3 — порожнистий алюмінієвий ротор, w1 обмотка живлення, w2 — вихідна обмотка). Обмотка wl підключена до джерела живлення Uживл, створює пульсуючий магнітний потік Ф1. Якщо ротор нерухомий, то пульсуючий магнітний потік Ф1 індукує у ньому тільки вихрові струми, магнітне поле яких, згідно із законом Ленца, спрямоване проти Ф1 і на вихідну обмотку w2 не впливає. Але при обертанні ротора в ньому, крім того, виникає додаткова електрорушійна сила, напрям якої збігається з твірною циліндричного ротора; вона створює струм І2, магнітне поле Ф2 якого пронизує вихідну котушку w2 й індукує в ній напругу y=Uвих — тим більшу, чим швидше обертається ротор х=п.
Тахогенератор змінного струму зображено на рис. 5.5 (1 — феромагнітний магнітопровід статора, 2 — нерухомий магнітопровід ротора, 3 — порожнистий алюмінієвий ротор, w1 обмотка живлення, w2 — вихідна обмотка). Обмотка wl підключена до джерела живлення Uживл, створює пульсуючий магнітний потік Ф1. Якщо ротор нерухомий, то пульсуючий магнітний потік Ф1 індукує у ньому тільки вихрові струми, магнітне поле яких, згідно із законом Ленца, спрямоване проти Ф1 і на вихідну обмотку w2 не впливає. Але при обертанні ротора в ньому, крім того, виникає додаткова електрорушійна сила, напрям якої збігається з твірною циліндричного ротора; вона створює струм І2, магнітне поле Ф2 якого пронизує вихідну котушку w2 й індукує в ній напругу y=Uвих — тим більшу, чим швидше обертається ротор х=п. застосовуються наприклад, в слідкуючих системах, колисигнал помилки є напругою, що поволі змінюється.
застосовуються наприклад, в слідкуючих системах, колисигнал помилки є напругою, що поволі змінюється.