Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Принцип дії магнітних підсилювачівСодержание книги
Поиск на нашем сайте
Принцип дії магнітного підсилювача заснований на використанні явища насичення ферромагнітних матеріалів у магнітномп полі, тобто нелінійності їхніх характеристик намагнічування В= f (Н) (рис. 6-1,а).
Рис. 6.1. Найпростіший дросельний магнітний підсилювач. а — залежність магнітної індукції В від напруженості магнітного поля H; б -схема.
У найпростішомп виді магнітний підсилювач являє собою дросель насичення змінного струму, у коло яеого послідовно з робочою обмоткой wр включений опір навантаження Rн (рис.6.1,б). Вихідна напруга Uвих наймається з навантаження Rн . Дросель насичення змінного струму являє собою пристрій, індуктивність якого може змінюватися в широких межах за рахунок підмагнічування дроселя постійним струмом. Будемо вважати, що струм у робочому колі I~ є синусоїдальним і його значенням можна знайти по формулі
де U~ — напруга живлення магнітного підсилювача; R-повний активний опір робочого кола; xp — індуктивний опір робочої обмотки. Повний активний опір робочого кола R складається з активного опору навантаження Rн і активного опору робочої обмотки Rр
Індуктивний опір робочої обмотки x p визначається по формулі
де w = 2pf -кутова частота живлення робочого кола; Lp — індуктивність робочої обмотки, обумовлена по формулі:
тут wр — число витків робочої обмотки; Sp — площа поперечного перетину феромагнітного осердя lс —довжина середньої магнітної лінії осерддя; mc -магнітна проникненість осердя. Значення струму в робочій обмотці можна записати у вигляді:
Рис. 6.2 Графічне пояснення принципу дії найпростішого дросельного магнітного підсилювача.
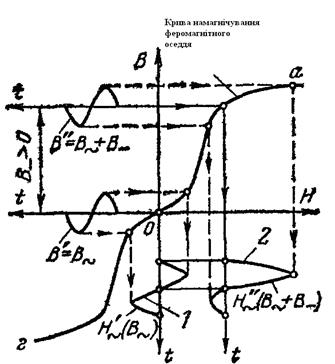
При подачі на вхід підсилювача керуючої напруги Uупо колі керування потече струм керування Iу, у результаті якого виникає напруженість постійного магнітного поля Н. Феромагнітне осердя підсилювача насичується і його магнітна проникність mc падає. Отже, індуктивний опір робочої обмотки x p також падає, у результаті чого струм у робочому колі I~ збільшується. У цьомп випадку велика частина змінної напруги U~ падає вже на навантаженні Rн, а менша частина — на робочій обмотці wр. Варто помітити, що за допомогою струму керування Iу можна регулювати струм у робочому колі, тобто струм у навантаженні Iн. Якщо обмотку керування wу виконати з числом витків, у багато разів перевищуюче число витків робочої обмотки wр, то одержимо ефект посилення по струмі. Принцип дії магнітного підсилювача, зображеного на рис. 6.1, б, можна проілюструвати за допомогою рис 6.2. На цьому рисунку приведена крива намагнічування феромагнитного оседя і криві зміни магнітної індукції.При відсутності напруги керування Uу постійна складова В_= 0. У цьому випадку В¢ = В~ і напруженість Н¢~ буде змінюватися по симетричній кривій 1, хід побудови якої на рис. 6.2 показаний стрілками. Крива 1 нагадує синусоїду. Якщо тепер на обмотку керування wу подати напругу керування Uу, то по обмотці потече струм керування Iу, що створює у феромагнітному осерді постійний магнітний потік Ф_. Цей потік накладається на змінний магнітний потік Ф~ створюваний робочою обмоткой wр. В результаті виникнення Ф_ з'являється постійна складової магнітної індукції, що буде більше нуля (В_>0), тобто відбувається ще більше насичення сердечника. У цьому випадку В"= В~ +В_ і напруженість Н¢¢~ змінюється вже по кривій 2, що відмінна від кривої 1. Перекручування форми кривої 2 відбувається в результаті наближення робочої точки кривої намагнічування до насичення. До основних властивостей магнітних підсилювачів можна віднести: 1) високу надійність і великий термін служби. Це пояснюється тим, що підсилювачі є статичними пристроями, тому що вони не мають рухливих частин. Вони, як правило, працюють у широкому діапазоні зміни температури, тиску і вологості. Підсилювачі взриво- і пожежобезпечні, тому що в них відсутні джерела іскріння;
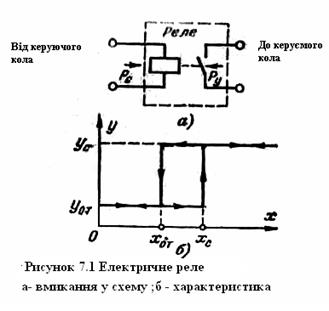
2) готовність до роботи після включення живлення (не потрібно розігрів); 3) високий ККД; 4) великий поріг чутливості. Магнітні підсилювачі можуть підсилювати слабкі сигнали постійного струму потужністю 10-19- 10-17 Вт; 5) велику вихідну потужність (вона може досягати сотень тисяч кіловатів); 6) великий коефіцієнт підсилення по потужності (наприклад, для одного каскаду він може бути дорівнює 106); 7) зменшення габаритів і маси магнітного підсилювача з підвищенням частоти (400 Гц і вище). Магнітні підсилювачі в автоматиці використовуються в якості дроселів насичення або керованої індуктивності, підсилювачів-перетворювачів сигналів постійного струму в змінний, магнітних модуляторів, підсилювачів потужності для керування двигунами змінного струму, бесконтактных магнітних реле, а також у якості регуляторів напруги, частоти і температури. Магнітні підсилювачі в телемеханіці застосовуються, наприклад, для модуляції частоти в електронних генераторах частоти. У цифрових ЕОМ вони використовуються як підсилювачі імпульсів. Найбільш істотним недоліком магнітних підсилювачів у порівнянні з електронними і напівпровідниковими підсилювачами є їхній велика інерційність, що викликана індуктивністю обмотки керування Lу. Інерційність в основному визначається відставанням у часу струму керування Iу від напруги керування Uу. В даний час розроблено безліч схем магнітних підсилювачів. Лекція 7 Перемикачі і розподілювачі Електромагнітні реле є найважливішими елементами, призначеними для управління різними споживачами. Реле є електромагнітним апаратом з однією або декількома парами контактів, керованих електромагнітом, споживаючим струм невеликої сили. У разі, коли коло управління містить реле, контакти вимикача або перемикача зношуються менше. Крім того, для монтажу елементів такого кола можуть бути використані дроти меншого діаметру. Сучасні реле характеризуються малим вмістом срібла в контактах і можуть мати виті або пластинчасті пружини. Для установки на печатну плату випускається спеціальна модифікація реле, що допускає розпайку виводів прямо на друкарській платі. По схемі комутації реле підрозділяються на замикаючі, розмикаючі і перемикаючі. Крім того, реле відрізняються режимом роботи: він тривалий або короткочасний. .Характеристика реле показана на рисунку 7.1. При збільшенні вхідної величини х: від 0 до хс вихідна величина у залишається постійною і рівною уот . У момент х=хс вихідна величина стрибком змінюється від уот до значення ус, тобто відбувається спрацювання реле.При подальшому збільшенні вхідної величини, вихідна величина залишається постійною і дорівнює ус або змінюється незначно.При зменшенні вхідної величини до значення х от вихідна величина залишається постійною і дорівнює ус.. При подальшому зменшенні вхідної величини у момент х=х от відбувається відпускання реле. Основними параметрами, що характеризують роботу реле в якому-небудь пристрої, є: 1) потужність спрацьовування Рс — потужність, яка підводиться до обмотки реле від управляючого кола для його надійного спрацьовування;
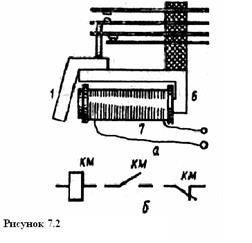
2) потужність в керованому колі Ру—максимальна потужність в керованому колі, при якій реле ще працює надійно; 3) час спрацьовування tc — інтервал часу від моменту подачі управляючого сигналу на обмотку реле до моменту дії контактів реле на керований ланцюг; 4) надійність реле. При проектуванні пристроїв, в яких застосовуються реле, останні вибирають з урахуванням перерахованих параметрів. Важливе значення при виборі реле мають його габарити і маса. На рис. 7.2 показано електромагнітне реле постійного струму, яке є сполученням електромагнітного перетворювача (з поворотним якорем) і контактного пристрою. При проходженні струму по котушці 7 у магнітопроводі, що складається з осердя 6та якоря 1, виникає магнітний потік, якір притягується до осердя, контактна група 4, 5розмикається (розмикаючий контакт), а контактна група 2, 3 замикається (замикаючий контакт). На принципових електричних схемах механічний зв'язок між електромагнітним приводом та контактами не вказується.
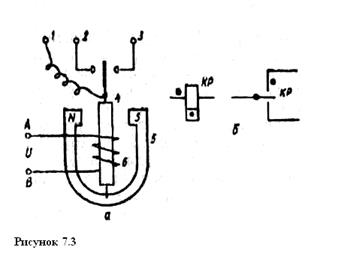
На рис. 7.3 показано електромагнітне реле поляризоване (1 — рухомий контакт , 2та 3—нерухомі контакти, 4— якір, 5— осердя). Якщо на затискач А підключити «плюс», на В — «мінус», то верхній кінець якоря намагнічується як N і тому переміщується праворуч; при цьому замикаються контакти 1 та 3. При протилежному напрямі струму в котушці контакт 1 замикається з контактом 2. (Чорні точки на рис. 8.3 означають, що при подаванні «плюса» на той кінець обмотки, який позначений чорною точкою, рухомий контакт замкнеться з тим нерухомим, який теж відмічено чорною точкою.) В другій половині XX ст. у промисловості стали застосовувати без¢якорні реле. Одним із представників без¢якорных реле є мініатюрне реле язичкового типу,. Реле має незамкнуту магнітну систему. Усередині котушки міститься герметизивана скляна ампула, наповнена інертним газом. Контактні язички виконані з ферромагнітного матеріалу, кінці яких покриті шаром родія або золота. При подачі керуючого сигналу на обмотку реле виникає електромеханічне зусилля F эм і контактні язички притягаються, замикаючи кероване коло. Реле язичкового типу мають переваги в порівнянні з електромагнітним реле з поворотним і утяжним якорем по надійності, швидкодії і габаритам. Термін служби реле складає сотні мільйонів спрацьовувань, частота спрацьовувань може досягати сотень герц. Контактні язички реле можуть комутувати потужність до декількох десятків ватів. Реле змінного струму Реле змінного струму спрацьовують при подачі на їхні обмотки змінного струму визначеної частоти. Ці реле частіше усього застосовуються в тих випадках, коли основним джерелом енергії є мережа змінного стуму.
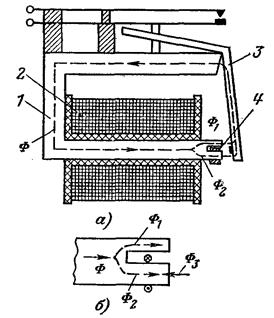
Будова реле змінного струму нагадує будову реле постійного струму, тільки осердя і якір реле змінного струму виготовляються з листової електротехнічної сталі, щоб зменшити втрати на гістерезис і вихрьові струми. Слід зазначити, що реле змінного струму застосовуються в техніці рідше, ніж реле постійного струму, тому що мають менше електромеханічне зусилля і менше чутливі в порівнянні з останніми. Вони складніші і дорожчі, тому що осердя і якір їх набираються з окремих листів; крім того, необхідно застосовувати спеціальні міри для усунення вібрацій якоря, що викликані тим, що електромеханічне зусилля проходить через нуль двічі за період живлячої напруги. Вібрація якоря - небажане явище, тому що може привести до обгорання контактів і розриву керованого кола. Для зменшення вібрацій якоря в техніці застосовуються спеціальні конструктивні заходи, наприклад застосування утяжеленого якоря двухфазного реле і коротко–замкненого витка. На рис. 7.4, а показана конструкція реле змінного струму з короткозамкненим витком або реле з “роздвоєним” полюсом, що частіше усього застосовується у пристроях автоматики. Один кінець сердечника реле 1 расщеплен на дві частини, причому на одну частина надітий короткозамкнений виток 4 (один або декілька витків мідного дроту), що виконує роль екрана. При подачі змінної живлячої напруги на обмотку реле 2 по осердю проходить змінний магнітний потік Ф, що у кінця осердя розгалужується. Частина магнітного потоку Ф1 проходит через неекрановану половину кінця осердя, а інша частина магнітного потоку Ф2 проходить через екрановану половину кінця осердя. Магнітний потік Ф2 наводить у короткозамкненому витку ЕРС,
Рис. 7.4. Реле змінного струму з короткозамкненим витком. а—конструкція; б—напрямок магнітних потоків у розчепленій частині осердя
що створює струм, що у свою чергу викликає магнітний потік Ф3, спрямований назустріч потокові Ф2 (рис. 7.4,б). У результаті потоку Ф3 потік Ф2 відстає по фазі що до потоку Ф1 на кут 60 – 80°. Тому сумарне електромеханічне зусилля Рем при подачі на обмотку живлячої напруги ніколи не дорівнює нулю, тому що обидва потоки (Ф1 і Ф2) проходять через нуль у різні моменти часу, тобто коли один із потоків, наприклад Ф1 проходить через нуль, іншій Ф2 має визначене значення й утримує якір 3 у притягнутому положенні, В даний час промисловість країни випускає багато типів реле змінного струму.
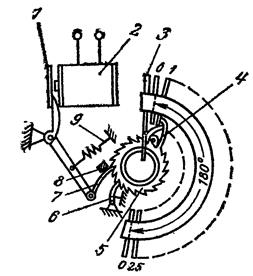
Розподільники У автоматиці, телемеханіці, обчислювальній техніці і зв'язку часто необхідно послідовно підключати керовані (виконавчі) кола. Для виконання зазначеної задачі застосовуються електромеханічні, релейні й електронні розподільники. Електромеханічні розподільники можуть приводитися в рух електромагні-тами постійного струму або електродвигунами. У техніці найбільше поширення отримали розподільники, що приводяться в рух електромагнітами постійного струму. Такі розподільники в літературі частіше усього називаються кроковими шукачами з електромагнітним приводом. Кроковий шукач так само, як і реле, є пристроєм дискретної дії. Він містить щітки (рухливі контакти), що під дією керуючого сигналу, подаваного на обмотку електромагніта, здійснюють послідовне переключення керованих кіл. У кожного крокового шукача є також і нерухомі контакти, що розташовуються по дузі окружності в декілька контактних рядів, створюючи при цьому контактні поля, причому кожний контактний ряд має свою щітку. Контактні поля виконуються не на повну окружність, а на половину (180°) або третина (120°) окружності. Число контактів на однім полі буває від 11 до 50, а число контактних рядів від 2 до 8. Швидкість переключення щіток складає від 1 до декількох десятків кроків у секунду. Вона обмежена інерційністью електромагніта. Рекомендуєма швидкість руху щіток – 10-11 кроків у секунду. Потужність, споживана електромагнітом, дорівнює 50-70 Вт.
За принципом дії крокові шукачі діляться на два види: прямої дії і зворотної. Як приклад на рис. 4-9 показана спрощена конструкція крокового шукача зворотної дії, принцип роботи якого полягає в наступному. Переміщення щітки 4 по нерухомих контактах 3 здійснюється за рахунок поворотної пружини 9, що має достатню пружність для створення зусилля, яке необхідно для пересування щітки. При надходженні керуючого сигналу на обмотку електромагніта 2 якір 1, долаючи дію поворотної пружини 9, притягуються і
собачка 7 сковзає по зубцях храпового колеса 5, не входячи з ним у зачеплення. При цьому в пружині 9 запасається енергія. При знятті керуючого сигналу пружина 9, переміщуючи собачку 7, повертає завдяки упору 8 храпове колесо 5 на один зубець і щітка 4 переходить на наступний нерухомий контакт 3, переключаючи послідуюче кероване коло. У момент тяжіння якоря храпове колесо 5 і щітка 4 утримуються стопорною собачкою 6. Якщо в кроковому шукачі зворотної дії переключення керованого кола відбувається на початку паузи (після зняття керуючого сигналу), то в кроковому шукачі прямої дії переключення керованого колоа здійснюється на початку подачі керуючого сигналу, тобто щітка 4 пересувається в той момент, коли якір 1 притягається до сердечника електромагніту. В даний час найбільше поширення одержали мікроконтролери. Лекція 8 Виконавчі пристрої. Електричні виконавчі пристрої. Виконавчі пристрої і елементи застосовуються для безпосереднього впливу на об’єкт управління.. Вони діляться на: електричні, гідравлічні, пневматичні, механічні і комбіновані. Виконавчі пристрої повинні задовольняти наступним вимогам 1.Їх потужність повинна задовольняти вимоги для приведення до руху об’єкту регулювання. 2. Їх статичні характеристики повинні бути лінійними. 3.Зона нечутливості повинна бути мінімальна. 4. Повинна бути достатня швидкодія. 5. Регулювання вихідної величини повинно бути простим і економічним.
|
|||||||||||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 1065; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 52.14.145.241 (0.008 с.) |



 З цієї формули випливає, що струм у робочомп колі, або в навантаженні, I~ = I н залежить від індуктивності робочої обмотки Lp, яка пропорційна пропорційна mc (Lp º mc ). У свою чергу магнітна проникність ферромагнітного осердя mcзалежить від магнітної індукції В і напруженості зовнішнього магнітного поля Н(mc=DВ/DН). При відсутності керуючої напруги Uу на вході дросельного магнітного підсилювача напруженість постійного магнітного поля H=0. У цьому випадку магнітна проникненість mc має велике значення. Отже, індуктивність Lр і індуктивний опір робочої обмотки x p також великі. У даному випадку струм у робочому колі I~ має невелике значення. Його звичайно називають струмом холостого ходу. При цьому велика частина змінної напруги U~ падає на робочій обмотці wр, а незначна частина — на навантаженні Rн (рис. 6-1, б).
З цієї формули випливає, що струм у робочомп колі, або в навантаженні, I~ = I н залежить від індуктивності робочої обмотки Lp, яка пропорційна пропорційна mc (Lp º mc ). У свою чергу магнітна проникність ферромагнітного осердя mcзалежить від магнітної індукції В і напруженості зовнішнього магнітного поля Н(mc=DВ/DН). При відсутності керуючої напруги Uу на вході дросельного магнітного підсилювача напруженість постійного магнітного поля H=0. У цьому випадку магнітна проникненість mc має велике значення. Отже, індуктивність Lр і індуктивний опір робочої обмотки x p також великі. У даному випадку струм у робочому колі I~ має невелике значення. Його звичайно називають струмом холостого ходу. При цьому велика частина змінної напруги U~ падає на робочій обмотці wр, а незначна частина — на навантаженні Rн (рис. 6-1, б).