
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Одношпиндельные токарные автоматы: назначение, компоновка. Основные узлы, системы управления, применяемые приспособления. Кинематическая схема токарно-револьверного автомата мод. 1е140Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Все токарно-револьверные автоматы однотипны по компоновке и имеют практически одинаковое устройство (рис. 3.16). В основании 4 автомата размещены системы смазки и охлаждения, а также коробка скоростей. Сверху к основанию крепится станина 6, на которой смонтирована шпиндельная бабка 1 с расположенным на ней специальнымкронштейном для одного или двух вертикальных поперечных суппортов и которая имеет продольные и поперечные прямоугольные направляющие для револьверного суппорта 3 с шестипозиционной головкой 2 и двух горизонтальных (переднего и заднего) поперечных суппортов. На рисунке поперечные суппорты закрыты ограждением 5.
На рис. 3.17 показана кинематическая схема токарно-револьверного автомата мод. 1Е140П, отличительными особенностями которого яв-ляютея: наличие дополнительного продольного суппорта, цепь ускоренного вращения распределительного вала на холостом ходу и применение для всех рабочих и вспомогательных движений в цикле обработки общего электродвигателя. Вращение шпинделя VI автомата (главное движение) осуществляется от двигателя М через цепь, включающую: передачу зубчатым ремнем со сменными шкивами, автоматическую коробку скоростей (валы I-V) со сменными колесами a/b и передачу зубчатым ремнем 24/24.
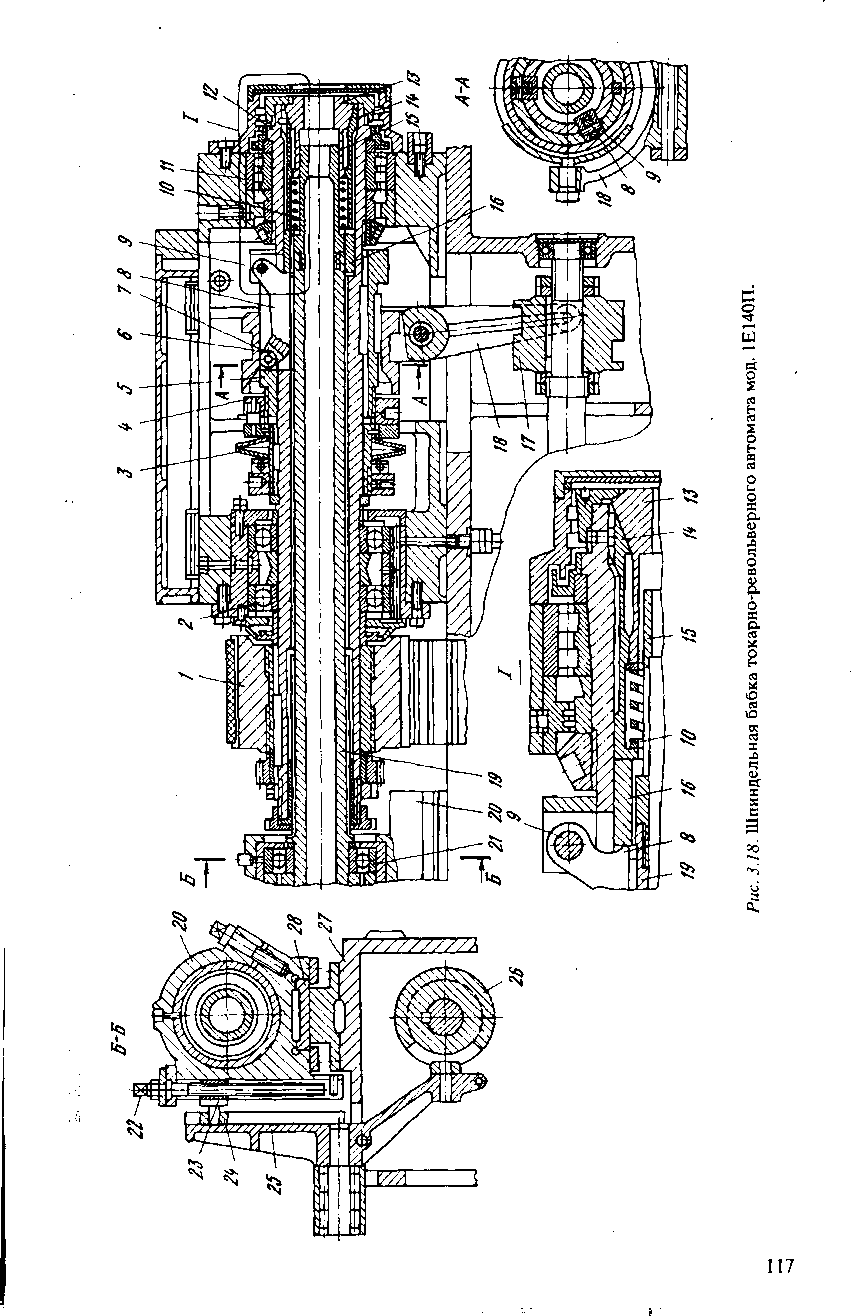
Основные узлы автомата Шпиндельная бабка автомата мод. 1Е140П показана на рис. 3.18. Пустотелый шпиндель 12 установлен на двух опорах. Передней опорой служит двухрядный роликовый подшипник 11, а задней - два радиаль- но-упорных шарикоподшипника 2. Опоры собраны с предварительным натягом. На шпиндель насажен приводной шкив 1. Внутри шпинделя помещена подающая труба 19, в правый конец которой ввернута подающая цанга 15, постоянно сжимающая пруток за счет сил упругости. Левый конец трубы через подшипник 21 связан с салазками 20, которые могут перемещаться по направляющим 27 кронштейна 28. За один оборот барабанного кулачка 26, рычаг 25 совершает одно качание, которое через сухарь 24 и гайку 23 сообщает салазкам с трубой и цангой один двойной ход. Длина хода, а следовательно, и величина подачи прутка регулируется винтом 22. В отверстии переднего конца шпинделя установлена конусная втулка 14, в которую вставлены пружина 10 и сменная зажимная цанга 13. Пружина сжатия 10 упирается одним концом в торец зажимной цанги, а другим - во внутренний бурт конусной втулки и постоянно стремится сдвинуть конусную втулку влево, освобождая Для разжима прутка барабанный кулачок 17, установленный на одном валу с кулачком 26, должен повернуть рычаг 18 и сместить муфту 6 вправо. Ролики 7, утопленные в стакан 5, получат возможность выйти из него в выточку муфты, а рычаги 8 повернуться вокруг своих осей 9. Это происходит под действием пружины 10, сдвигающей втулку 14 влево, которая через втулку 16 нажимает на короткие плечи рычагов 8. Взаимное расположение профильных кривых на кулачках 17 и 26 обеспечивает следующую последовательность работы подающей и зажимной цанг. При перемещении подающей цанги 15 влево она скользит по прутку, который удерживается зажимной цангой 13. После раскрытия цанги 13 подающая цанга 15 с прутком движется вправо до встречи с упором (качающимся или установленным в револьверной головке). От удара прутка об упор возможен его отскок и поэтому ход салазок 20 настраивается большим по сравнению с требуемым вылетом прутка, чтобы при дальнейшем перемещении цанги был обеспечен контакт прутка с упором. После этого и происходит зажим прутка.
Поперечные суппорты (рис. 3.19) токарно-револьверного автомата перемещаются от кулачков распределительного вала через рычаги 7, 8, 13, 14 и др. с зубчатыми секторами, имеющими для всех суппортов передаточное отношение 1:1. На переднем горизонтальном суппорте 1 имеются продольные направляющие, в которых тягой 12 от отдельного кулачка перемещается параллельно оси шпинделя дополнительный продольный суппорт 6. Если он в работе не используется, его жестко закрепляют на призме переднего поперечного суппорта враспор винтом 10 и гайками 9. Продольный суппорт расширяет технологические возможности автомата. На рис. 3.20 приведен пример использования суппорта при обработке конусов с помощью установленного на нем специального приспособления (показано штрихпунктирными линиями). При продольном перемещении суппорта 6 ролик 2 скользит по пазу между копирными планками 11, установленными на поперечном суппорте 1 и повернутыми на заданный угол. В результате ползуну 4 с резцом одновременно сообщается поперечная подача по направляющим приспособления и таким образом обтачивается конус. Ползун с резцом устанавливают на требуемый размер винтом с лимбом 3, предварительно ослабив винты 5. Продольный суппорт с револьверной головкой наиболее распространенной конструкции показан на рис. 3.20. Она обеспечивает рабочие ходы суппорта 18 от кулачка 12, а также быстрый отвод- подвод суппорта на расстояние, не зависящее от перепада радиусов на кулачке 12 и достаточное для того, чтобы исключить столкновение инструментов с обрабатываемой заготовкой при смене позиций револьверной головки.
При рабочем ходе суппорта поворот рычага 13 с зубчатым сектором 11 от кулачка 12 вызывает перемещение пустотелой рейки 14 с расположенной внутри и жестко связанной с ней штангой 15 и далее шатуна 16 и кривошипа 17, вал 3 которого с подшипниками установлен непосредственно в корпусе суппорта. Положение суппорта можно регулировать смещением штанги 15 относительно рейки 14 с помощью резьбовой втулки 9 с контргайкой 8. Пружина 10 обеспечивает обратный -ход суппорта, осуществляя силовое замыкание кулачкового механизма. Поворот револьверной головки 1 на 1/6 оборота совершается за один оборот вала 3, на котором установлены кулачок 4 фиксатора 2 револьверной головки и диск 5 с расположенным на торце поводком (на рис. 3.20 не виден) мальтийского креста. Вращение валу 3 передается от вспомогательного вала зубчатыми передачами 7 и 6. Цикл поворота револьверной головки осуществляется следующим образом (рис. 3.21): в начале кривой спада на кулачке 6 (позиция I) подается команда на включение однооборотной муфты на вспомогательном валу и валик 2 начинает вращательное движение, выводя кривошипно-шатунный механизм из мертвого положения, при котором суппорт находился на расстояниях Lxи соответственно, от торца шпинделя и заднего жесткого упора. Под действием пружины 7 суппорт с поворачивающимся кривошипным валиком 2 отходят назад до упора (позиция II) и шатун 3 с рейкой 4 начинают двигаться вперед, отрывая ролик рычага 5 от кулачка 6. В это время происходит расфиксация головки и начинается ее поворот (позиция III), по завершении которого (позиция IV) онадолжна быть вновь зафиксирована. При повороте головки кривошипно- шатунный механизм проходит второе мертвое положение, после которого направление смещения рейки 3 с шатуном 4 изменится на обратное и будет продолжаться до тех пор, пока ролик рычага 5 не опустится на кулачок 6 (позиция V).
|
||||
|
|
Последнее изменение этой страницы: 2016-07-16; просмотров: 1547; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.116.15.124 (0.008 с.) |

 Токарно-револьверные автоматы предназначены для изготовления деталей из различных сталей и цветных металлов и сплавов по 9-11-му.квалитетам. Обработка на них ведется из холоднотянутого кабиро- Iванного круглого, квадратного и шестигранного пруткового материала. 1 В отличие от автоматов продольного точения шпиндельная бабка 1 токарно-револьверного автомата (рис. 3.15) не имеет осевого перемещения. Шпиндель 2 обеспечивает более быстрое левое вращение, при котором выполняется большинство рабочих операций, и медленное правое вращение, при котором производят нарезание резьбы, развертывание и некоторые другие операции. Кроме поперечных суппортов 3, токарно-револьверные автоматы имеют один продольный револьверный суппорт 5, на котором установлена поворотная шестйпози-ционная(I-VI) револьверная головка 4 с инструментами для обработки с продольной подачей. В одной позиции револьверной головки устанавливается регулируемый упор 6, ограничивающий величину подачи прутка 7.
Токарно-револьверные автоматы предназначены для изготовления деталей из различных сталей и цветных металлов и сплавов по 9-11-му.квалитетам. Обработка на них ведется из холоднотянутого кабиро- Iванного круглого, квадратного и шестигранного пруткового материала. 1 В отличие от автоматов продольного точения шпиндельная бабка 1 токарно-револьверного автомата (рис. 3.15) не имеет осевого перемещения. Шпиндель 2 обеспечивает более быстрое левое вращение, при котором выполняется большинство рабочих операций, и медленное правое вращение, при котором производят нарезание резьбы, развертывание и некоторые другие операции. Кроме поперечных суппортов 3, токарно-револьверные автоматы имеют один продольный револьверный суппорт 5, на котором установлена поворотная шестйпози-ционная(I-VI) револьверная головка 4 с инструментами для обработки с продольной подачей. В одной позиции револьверной головки устанавливается регулируемый упор 6, ограничивающий величину подачи прутка 7.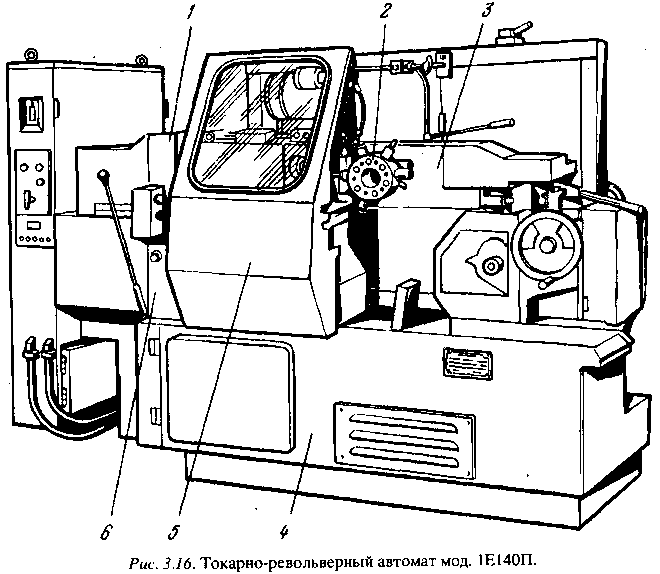

 Автоматическая коробка скоростей, примененная в главном приводе автомата мод. 1Е140П, является нормализованным узлом (АКС-206- 63-11). Ее конструкция описана в т. 1, § 5.3 настоящего учебника (см. рис. 5.41).
Автоматическая коробка скоростей, примененная в главном приводе автомата мод. 1Е140П, является нормализованным узлом (АКС-206- 63-11). Ее конструкция описана в т. 1, § 5.3 настоящего учебника (см. рис. 5.41). Завершая оборот, валик 2 давит через шатун на неподвижную рейку и осуществляет перемещение суппорта вперед в исходное положение (позиция VI). Новые расстояния L2и а2 связаны с предыдущими значениями L1и а1 зависимостью L1+ а1=Lг + аг = L0, а максимальное расстояние, на которое может быть отведен суппорт, равно двум радиусам кривошипа. Продолжительность цикла поворота револьверной головки автомата мод. 1Е140П составляет одну секунду.
Завершая оборот, валик 2 давит через шатун на неподвижную рейку и осуществляет перемещение суппорта вперед в исходное положение (позиция VI). Новые расстояния L2и а2 связаны с предыдущими значениями L1и а1 зависимостью L1+ а1=Lг + аг = L0, а максимальное расстояние, на которое может быть отведен суппорт, равно двум радиусам кривошипа. Продолжительность цикла поворота револьверной головки автомата мод. 1Е140П составляет одну секунду.




