Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Кинематическая группа ,Кинематические структуры станков.Содержание книги
Поиск на нашем сайте
Каждое исполнительное движение в станках осуществляется кинематической группой, представляющей собой совокупность источника движения, исполнительного органа, кинематических связей и органов настроек, обеспечивающих требуемые параметры движения. Название кинематической группы аналогично названию создаваемого ею исполнительного движения. Например, группу, создающую формообразующее движение, называют формообразующей группой и т.п. Структура кинематической группы может быть разнообразной и зависит от характера осуществляемого движения, числа исполнительных органов, потребности регулирования параметров движения. Под исполнительными органами понимают подвижные конечные звенья кинематической группы, непосредственно участвующие в образовании траектории исполнительного движения. Исполнительные органы, осуществляющие абсолютное или относительное движение заготовки или режущего инструмента в процессе формообразования, называют рабочими. Например, рабочими органами являются такие звенья станка, как стол, шпиндель, суппорт, ползун и т.п. В большинстве случаев исполнительные органы совершают вращательное или прямолинейное движение, т.е. являются подвижными звеньями вращательной или поступательной исполнительной кинематической пары.
а) вращательная б) поступательная
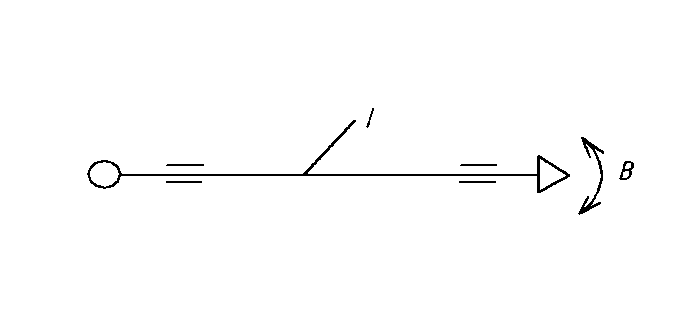
В зависимости от числа исполнительных органов кинематические группы делятся на простые и сложные. Простые группы имеют один исполнительный орган, а сложные – два и более исполнительных органов. Любая кинематическая группа включает в себя два качественно различных вида кинематической связи – внутреннюю и внешнюю. Кинематическая связь в станках – это связь между звеньями или исполнительными органами станка, которая накладывает условия ограничения, не позволяющие занимать произвольные положения в пространстве относительно друг друга и иметь произвольные скорости. Под внутренней кинематической связью группы понимают совокупность кинематических звеньев и их соединений, обеспечивающих качественную характеристику движения, т.е. его траекторию. Внутренняя кинематическая связь группы в станках реализуется разными путями в зависимости от характера исполнительного движения, числа исполнительных органов в группе, требуемой точности образуемой производящей линии (траектории движения) и других факторов. Например, в простых кинематических группах она осуществляется соединением двух соприкасающихся звеньев исполнительной группы, одним из которых является сам исполнительный орган 1 группы, т.е. шпиндель, стол и т. д. [рис. а) и б)].
функциональную согласованность их перемещений или скоростей. в) Эти цепи называют внутренними или функциональными. Причем кинематическое соединение исполнительных органов сложной группы может быть как механическим, т.е. цепью механических передач, так и не механическим, например, в виде электрической цепи, как в станках с ЧПУ. Например, рис. в), группа, обеспечивающая сложное движение (В1В2) и имеющая два исполнительных органа I и II, содержит в своей структуре, как минимум, одну внутреннюю кинематическую цепь 1-4-2 между исполнительными органами.
г) характеристики движения, т.е. его скорость, направление, путь и исходную точку. Обычно внешняя кинематическая связь сложной группы реализуется в виде кинематической цепи 3-4 между источником движения М и одним из звеньев внутренней связи группы (рис. в). Для простой кинематической группы внешняя кинематическая связь есть цепь 1-2 между источником движения М и исполнительным органом группы I (рис. г). Внешняя кинематическая связь предназначена для передачи энергии от источника движения М во внутреннюю связь группы. На рис. д) показана структурная схема кинематической группы, обеспечивающей исполнительное движение (В1В2П3) и имеющей три исполнительных органа. Для обеспечения функциональной согласованности перемещений или скоростей исполнительных органов I, II, III достаточно двух функциональных кинематических цепей, например, 1-5-2 и 2-5-3 или другого их сочетания. Внешняя кинематическая связь группы реализуется кинематической цепью 4-5. Для изменения и регулирования параметров движения в станках используют специальные устройства, которые в общем случае называются органами настройки. Органы настройки таких параметров движения, как траектория, скорость и иногда путь, на структурных схемах обозначают знаком Заштрихованная часть знака
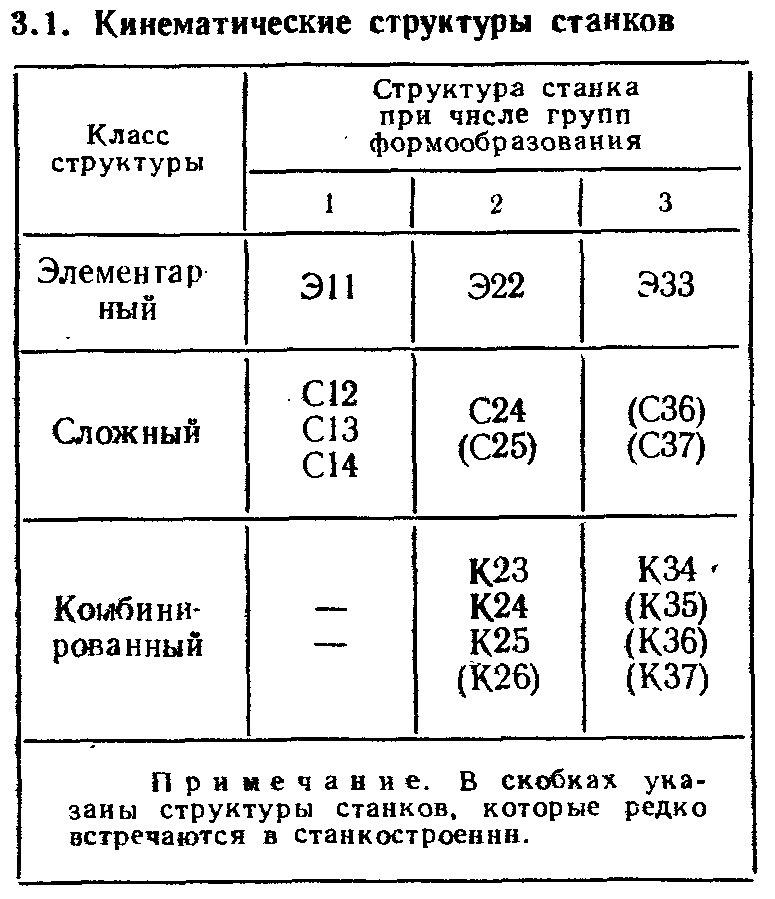
д) Под внутренней кинематической связью группы понимают совокупность кинематических звеньев и их соединений, обеспечивающих качественную характеристику движения, т. е. его траекторию. Под внешней кинематической связью группы понимают совокупность кинематических звеньев и их соединений, обеспечивающих количественные характеристики движения, т. е. его скорость, направление, путь и исходную точку. Кинематическая структура станка представляет собой совокупность кинематических групп: Группы могут быть соединены между собой разными способами; их соединение зависит от многих факторов. Наибольшее влияние на соединение кинематических групй оказывают общность их исполнительных органов и источника движения, а также необходимость координации во времени создаваемых группами движений. Всякое соединение двух кинематических групп осуществляется специальными дополнительными устройствами, такими, как суммирующие механизмы, реверсы, муфты и т. д. Главной и определяющей частью кинематической структуры любого станка является его формообразующая часть, составляющая общее число и характер групп формообразования, а также их кинематическое соединение. По этому признаку все многообразие кинематических структур металлорежущих станков можно разделить на три класса. 1. Класс элементарных структур Э, к которому относятся станки с кинематической структурой, содержащей только простые группы формообразования, т. е. группы, создающие движение Ф (В) и Ф_(П). 2; Класс сложных структур С, к которому относятся станки с кинематической структурой, содержащей только сложные группы формообразования, т. е. группы, создающие движения Ф (В,В2), Ф (В3П4П5) и т. д. 3. Класс комбинированных структур К, к которому относятся станки с кинематической структурой, содержащей одновременно и простые и сложные группы формообразования.
|
||||
|
|
Последнее изменение этой страницы: 2016-07-16; просмотров: 1255; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.217.89.130 (0.008 с.) |


 В сложных кинематических группах с двумя и более исполнительными органами внутренняя кинематическая связь реализуется в виде кинематической цепи (цепей) связывающей под-вижные исполнительные органы группы и обеспечивающей строгую
В сложных кинематических группах с двумя и более исполнительными органами внутренняя кинематическая связь реализуется в виде кинематической цепи (цепей) связывающей под-вижные исполнительные органы группы и обеспечивающей строгую Под внешней кинематической связью группы понимают совокупность кинематических звеньев и их соединений, обеспечивающих количественные
Под внешней кинематической связью группы понимают совокупность кинематических звеньев и их соединений, обеспечивающих количественные с буквой i, а органы настройки направления движения – знаком
с буквой i, а органы настройки направления движения – знаком  .
.