
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Автоматизированный электроприводСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД Курс лекций для студентов специальности "Металлообрабатывающие станки и инструменты"
СОДЕРЖАНИЕ
ГЛАВА 1 ОБЩИЕ ВОПРОСЫ АЭП. МЕХАНИКА АЭП 1.1. Основные понятия и определения 1.1. Механические характеристики рабочих машин и ЭД 1.2. Механические характеристики ДПТ 1.3. Механические характеристики АД 1.4. Механические характеристики СД
ГЛАВА 2 МЕТОДЫ РАСЧЕТА МОЩНОСТИ И ВЫБОРА ЭЛЕКТРОДВИГАТЕЛЕЙ 2.1. Силы и моменты, действующие в ЭП 2.2. Приведение моментов сопротивления и инерции к валу двигателя 2.3. Общие замечания. Нагрев и охлаждение двигателей 2.4. Метод средних потерь. Эквивалентные методы. 2.5. Серии электродвигателей, применяемых в станках
ГЛАВА 3 ЭЛЕМЕНТЫ СИЛОВОЙ И РЕГУЛИРУЮЩЕЙ ЧАСТЕЙ СЭП Классификация электронных устройств СЭП 3.1. Тиристорные преобразователи 3.2. Транзисторные преобразователи 3.3. Типовые датчики 3.4. Типовые узлы защиты ЭП 3.5. Типовые регуляторы
ГЛАВА 4 ТИПОВЫЕ СЭП МЕТАЛЛОРЕЖУЩИХ СТАНКОВ 4.1. Принципы построения типовых СЭП 4.2. Одноконтурная СЭП постоянного тока 4.3. СПР ЭП постоянного тока с однозонным управлением 4.4. СПР ЭП постоянного тока с двухзонным управлением 4.5. СЭП переменного тока с АИН и АИТ (схемы с ОС по скорости и току) 4.6. Системы стабилизации технологических параметров при резании металлов
ГЛАВА 5 СЛЕДЯЩИЕ СЭП МЕТАЛЛОРЕЖУЩИХ СТАНКОВ 5.1. Типовые структуры следящих ЭП и их элементы 5.2. Следящий ЭП с подчиненным регулированием параметров 5.3. Следящий ЭП подачи копировально-фрезерных станков
ЛИТЕРАТУРА
1. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов: Учебник для вузов / М.П. Белов, В.А. Новиков, Л.Н. Рассудов. – М.: Издательский центр "Академия", 2004. – 576 с. 2. Инжиниринг электроприводов и систем автоматизации: учеб. пособие для студ. высш. учеб. заведений / М.П. Белов, О.И. Зементов, А.Е. Козярук и др.; под. ред. В.А. Новикова, Л.М. Чернигова. – М.: Издательский центр "Академия", 2006. – 368 с. 3. Ковчин С.А., Сабинин Ю.А. Теория электропривода: Учебник для вузов. – СПб.: Энергоатомиздат, 2000. – 496 с. 4. Шестаков В.М., Дмитриев Б.Ф., Репкин В.И. Электронные устройства систем автоматического управления: Учебное пособие. – СПб: Изд. ЛГТУ, 1991.
ГЛАВА 1. ОБЩИЕ ВОПРОСЫ АЭП. МЕХАНИКА АЭП.
1.1. Основные понятия и определения
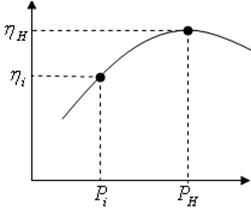
Существуют различные виды приводов, но благодаря эффективному аккумулированию, простоте передачи, свойствам суммирования и делимости электроэнергия более широко используется по сравнению с другими видами энергии. В настоящее время наиболее часто используется автоматизированный электропривод (ГОСТ Р 50369-92). Электрическим приводом (ЭП) называется электромеханическая система, предназначенная для приведения в движение рабочих органов машин, целенаправленного управления этими процессами и состоящая из передаточного, электродвигательного, преобразовательного, управляющего и информационного устройств. Передаточное устройство предназначено для преобразования форм движения и передачи механической энергии от двигательного устройства к рабочим органам машины. Двигательное устройство преобразует электрическую энергию в механическую и формирует совместно с передаточным устройством заданные формы движения рабочих органов. Преобразовательное устройство служит для связи СЭП с источником электроэнергии (промышленная сеть или автономный), для преобразования одной формы электроэнергии в другую (например, выпрямление переменного тока). Управляющее и информационное устройства предназначены для формирования заданных законов управления потоком энергии
Классификация ЭП 1. По назначению: а) главные (например, главного движения); б) вспомогательные (например, подачи). 2. По роду потребляемого тока двигателя: а) постоянного тока; б) переменного тока. 3. По виду силовых ключей: а) тиристорные; б) транзисторные; в) микропроцессорные 4. По виду системы автоматического управления (САУ): а) аналоговые (непрерывные) системы ЭП (СЭП); б) цифровые (дискретные) СЭП; в) цифроаналоговые СЭП; г) линейные или нелинейные СЭП; д) статические или астатические СЭП; 5. По выполняемым функциям: а) грубое регулирование скорости (разомкнутые СЭП); б) точное регулирование скорости (замкнутые СЭП); в) слежение за произвольно изменяющимися входными сигналами (следящие системы); г) программная отработка заданий (СЭП с программным управлением); д) взаимосвязанное регулирование параметров (многодвигательные и взаимосвязанные СЭП); Функции а)-д) считаются основными. К дополнительным функциям относятся: сигнализация (диагностика) и защита ЭП.
Механические характеристики асинхронных двигателей (АД)
1) Механические характеристики 3-фазных АД
Асинхронный электродвигатель имеет трехфазную обмотку статора. При подаче на неё трехфазного напряжения частотой пар полюсов статора (определяется укладкой обмотки). Ротор АД чаще всего выполняется короткозамкнутым ("беличья клетка"). В подъёмных и транспортных машинах применяют фазный ротор, где обмотка ротора через контакные кольца выводится на неподвижное основание и соединяется с добавочными сопротивлениями. В настоящее время АД по умолчанию применяют для привода большинства объектов.
При описании АД электрические параметры двигателя имеют индексы: 1 – статор; 2 – ротор. При R1=0 механическая характеристика описывается формулой
1 – естественная ( 1' – реверс (меняются местами две из трех фаз); 2 - 3 - 4 – АД с фазным ротором тормозные режимы 5 – динамическое торможение: на обмотку статора подается постоянный ток, тогда раскручиваемый ротор будет тормозиться; 6 – противоток (реверс): (меняются местами две фазы); 7 – рекуперация Пуск АД: Для ограничения пусковых токов АД большой мощности или получения плавного пуска асинхронного привода применяют: 1) включение активных или индуктивных сопротивлений в цепи статора, которые выводятся в конце пуска; 2) "частотный" пуск через преобразователь, плавно изменяющий частоту питания двигателя 3) пуск с фазным ротором; 4) реакторный пуск – включение индуктивных сопротивлений в цепь ротора. Вначале пуска частота тока в роторе близка к частоте сети, индуктивное сопротивление
2) Механические характеристики двухфазных АД
Выпускаются на мощность до 1 кВт. Могут выполняться со сплошным или полым ротором. ОВ, ОУ – соответственно обмотки возбуждения и управления; Для сдвига фаз в цепь ОВ последовательно включают конденсатор емкостью 1-2 мкФ на каждые 100 Вт.
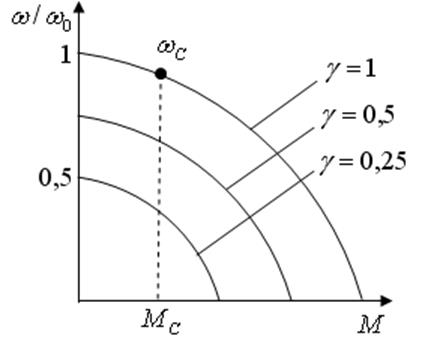
Примечание: при частотном управлении характеристики станут линейными и параллельными друг другу, при фазовом – только линейными.
Общие замечания
1) Задачей является грамотный выбор электродвигателя для заданного механизма (агрегата) с учетом допустимого нагрева и перегрузки по току и моменту. Потери делятся на: - постоянные – механические и в стали – не зависят от тока двигателя; - переменные – в меди – являются функцией квадрата тока двигателя.
Связь между потерями и КПД:
2) Нагрев и охлаждение ЭД при длительном режиме работы.
При неизменной температуре окружающей среды температура двигателя будет возрастать по закону
3) Режимы работы двигателей а) длительный (S1)
б) кратковременный (S2)
в) повторно-кратковременный (S3, S4)
продолжительность включения стандартизированы ПВ% = 15, 25, 40, 60 %
4) Классы изоляции и допустимые рабочие температуры двигателей. В соответствии с международными стандартами различают следующие классы изоляции
В двигателях общего назначения применяется изоляция классов B и F.
5) Климатическое исполнение электрических машин
6) Степени защиты электрических машин (ГОСТ 14254-80 и ГОСТ 17494-72) Общее обозначение типа защиты (International Protection) – IP, где 1-я цифра: степень защиты персонала от соприкосновения с движущимися частями оборудования и от попадания внутрь оболочки твердых посторонних тел; 2-я цифра: степень защиты от попадания внутрь оборудования воды.
*) Не относится к вентиляторам электрических машин
Стандартное исполнение защиты двигателей IP 54. По заказу обеспечиваются повышенные степени защиты IP 55 и IP 65.
Вентилятор принудительного охлаждения рекомендуется использовать в следующих случаях: - Приводы, работающие с большим количеством включений - Приводы с дополнительной инерционной массой (инерционной крыльчаткой) - Приводы с управлением от преобразователя с диапазоном регулирования свыше 1:20 - Приводы с управлением от преобразователя, сохраняющие номинальный вращающий момент при низкой частоте вращения или в положении останова
Методы расчета мощности
Выбор мощности двигателя при стационарной нагрузке осуществляется по условию Рассмотрим выбор мощности двигателей при переменной нагрузке:
1. Метод средних потерь (прямой метод). В основе метода лежит нагрузочная диаграмма. Рассмотрим прямой метод учета потерь в двигателе
1) Рассчитывается средняя мощность на валу двигателя по формуле
Потери в двигателе пропорциональны активной мощности. Таким образом, нагрев двигателя определяется не 2) выбор мощности двигателя где k= 1,2...1,3 – коэффициент запаса, учитывающий пропорциональность потерь квадрату тока; 3) Расчет потерь при различных нагрузках с использованием каталожных кривых
4) определяются средние потери за цикл 5) выбор мощности двигателя по условию 6) выбранный двигатель должен быть проверен на перегрузку и пусковые условия ДПТ: АД:
Эквивалентные методы Данные методы относятся к косвенным, поскольку косвенно учитывают потери в электрической машине. 1) Метод эквивалентного тока. Рассчитывается некоторый эквивалентный ток, потери от которого равнозначны фактическим при переменной нагрузке т.к.
2) Метод эквивалентного момента
3) Метод эквивалентной мощности
Затем выбранный двигатель должен быть проверен на перегрузку и пусковые условия.
Наиболее широкое применение у метода эквивалентного тока, наиболее узкое у метода эквивалентной мощности. Методы эквивалентного тока и мощности не применимы при двухзонном управлении так как содержат блоки произведений в формулах
Замечание: При повторно-кратковременный режиме двигатель выбирается из условия
Здесь методы эквивалентного момента и тока практически не используются. В случае, если нагрузка в разных циклах неодинакова, рассчитывают среднюю ПВ с учетом n циклов.
Тиристорные преобразователи
Достоинства: а) надежность; б) малая масса; в) малая мощность управления; г) высокое быстродействие; д) высокий КПД (0,95-0,97) Недостатки: а) не выдерживает перегрузок; б) снижение сos
1. Схемы ТП и способы управления: 1) Нулевая схема реверсивного привода m=3 – фазность преобразователя. Достоинства: меньшее количество тиристоров. Применяется в маломощных приводах.
2) Мостовая схема выпрямления реверсивного привода (схема Ларионова) m=6; Достоинства: а) меньшее количество сглаживающих дросселей; б) меньший класс тиристоров; Применяется в приводах средней и большой мощности.
2. Способы управления реверсивными ТП: а) раздельное, когда группы тиристоров управляются поочередно. Достоинства: 1) отсутствие уравнительного тока и, следовательно необходимости включения уравнительных реакторов (УР); Недостатки: 1) широкая зона прерывистых токов; 2) нелинейность механических характеристик в начале координат; 3) замедленный реверс напряжения преобразователя. Вместе с тем раздельное управление ТП применяется чаще.
б) согласованное, когда обе группы тиристоров управляются совместно, по условию Достоинства: 1) линейная характеристика; 2) узкая зона прерывистых токов; 3) быстрый реверс. Недостатки: 1) наличие статических и динамических уравнительных токов. Для борьбы с ними включают уравнительные реакторы (УР).
3. Математическое описание ТП
1) Система управления тиристорным преобразователем (СУТП) или система импульсно-фазового управления (СИФУ)
а) со стабилизированным пилообразным опорным напряжением
б) с нестабилизированным синусоидальным опорным напряжением
в) если СУТП является цифровой, то угол открытия тиристоров
2) Силовая часть ТП. Описывается выражением
а) СУТП со стабилизированным пилообразным опорным напряжением.
б) СУТП с нестабилизированным синусоидальным опорным напряжением.
Из рисунков видно, что колебания напряжения сети переменного тока (пунктирная линия) влияют на выходную ЭДС в случае а) и не влияют в случае б).
3) Нагрузка ТП (двигатель). Формирует характер тока преобразователя, который может быть непрерывным, гранично-непрерывным и прерывистым.
Характер тока влияет на характеристики привода. В зоне непрерывного тока характеристики жесткие, поскольку внутреннее сопротивление преобразователя невелико. При прерывистом токе внутреннее сопротивление ТП существенно возрастает, что снижает жесткость характеристик. Зона прерывистого тока крайне неблагоприятна для регулирования, так как падает жесткость характеристик привода, и появляется нелинейная зависимость (см. рис.).
Типовые датчики
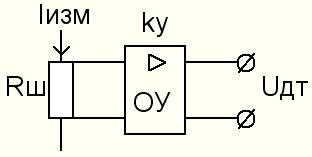
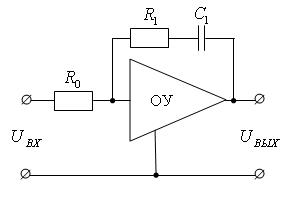
Рассмотрим датчики отечественной универсальной системы блочных регуляторов аналогового исполнения (УБСР-АИ). 1) Датчик тока ДТ1-АИ Применение операционного усилителя (ОУ) позволяет развязать силовую и управляющую цепи привода, что также необходимо по технике безопасности. Коэффициент усиления
2) Датчик напряжения ДН1-АИ. Коэффициент усиления
3) Датчик ЭДС
3) Датчики скорости. В качестве датчиков скорости используются прецизионные тахогенераторы постоянного и переменного тока
4) Датчики положения а) Резольвер (англ. resolver). Работает по принципу синусно-косинусного вращающегося трансформатора (СКВТ). У вращающегося трансформатора ротор состоит из катушки (обмотки), которая вместе с обмоткой статора образует трансформатор. Принципиально резольвер устроен точно так же с той лишь разницей, что статор выполнен не из одной, а из двух расположенных под углом 90° друг к другу обмоток. Резольвер служит для определения абсолютного положения вала двигателя внутри одного оборота. Кроме того, по сигналу резольвера определяется значение скорости и моделируется инкрементный датчик для регулирования положения. Ротор резольвера закреплен на валу двигателя. Для того чтобы можно было передавать переменное несущее напряжение на ротор без щеток, на статоре и роторе размещены дополнительные обмотки. По двум выходным синусоидальным напряжениям
б) Фотоэлектрические датчики серии ПДФ. Отсутствие температурного и временного дрейфа. 500-5000 имп/об.
5) Датчики рассогласования. Применяются в следящих системах. а) Потенциометрические датчики рассогласования
б) Сельсины в трансформаторном режиме. Сельсин имеет 2-фазную обмотку статора и 3-фазную обмотку ротора. Ось сельсина-датчика приводится в движение от задающего устройства, а ось сельсина-приемника – от исполнительного. При разности углов
Типовые регуляторы
1) Статика описывается алгебраическими уравнениями (АУ), а динамика – дифференциальными ДУ. Для облегчения исследования динамики сложных электромеханических систем с помощью преобразования Лапласа Передаточной функцией (ПФ) W(p) называется отношений изображений по Лапласу выходной переменной к входной (см. курс ТАУ).
2) Показатели качества переходного процесса. Рассмотрим переходный процесс в замкнутой системе:
а) Статическая ошибка б) Время переходного процесса в) Перерегулирование
3) Типовые регуляторы. Используются в замкнутых системах для получения требуемых показателей качества. Наиболее часто применяются пропорциональные (П), пропорционально-интергальные (ПИ) и пропорционально-интегрально-дифференциальные (ПИД) регуляторы. Выбор типа регулятора определяется передаточной функции объекта управления. Передаточные функции регуляторов
Одноконтурные СЭП
1. Функциональная схема СЭП и статические характеристики системы
На выходе тахогенератора ТГ включен фильтр
2. Оптимизация динамики СЭП Структурно-динамическая схема СЭП может быть представлена в виде
На схеме введены обозначения: РС –регулятор скорости, П – силовой преобразователь, Д – датчик скорости; ДС – датчик скорости; При
где Должны быть скомпенсированы регулятором скорости для получения быстропротекающих малоколебательных переходных процессов; Компенсация больших постоянных времени физически происходит за счет форсировок выходных напряжений регуляторов.
ПФ разомкнутой системы будет:
С учетом малых постоянных времени можно определить настройку ПИД-регулятора.
1) Настройка на оптимум по модулю (ОМ):
ПФ разомкнутого контура скорости
Переходные процессы в системе определяются малыми постоянными времени. Большие постоянные времени скомпенсированы регулятором скорости. ПФ замкнутого контура скорости Настройка на ОМ соответствует коэффициенту демпфирования колебательного контура
2) Настройка на симметричный оптимум (СО):
ПФ разомкнутого контура скорости
ПФ замкнутого контура скорости Настройка на СО соответствует коэффициенту демпфирования колебательного контура
СЭП переменного тока
1) Классификация регулируемых электропрводов переменного тока:
В настоящее время в большинстве случаев применяются АИН. Автономный – выходная частота не зависит от входной. Источник напряжения – не меняет напряжение от нагрузки. АКБ по своим свойствам приближена к источнику напряжения. Реже применяют АИТ. Источник тока имеет большое внутреннее сопротивление.
2) Основные принципы управления скоростью двигателя. Введем следующие обозначения
Чаще всего реализуются три закона управления: а)
б)
в)
3) Схема силовой части электропривода с АИН. Рассмотрим наиболее часто применяемую схему с неуправляемым выпрямителем на диодах и инвертором на транзисторах.
VD1-6– тиристоры выпрямителя; VT1-6 – транзисторы инвертора;
Достоинства схемы: - пригодна для многодвигательного привода; - относительно простая схема управления инвертором; Недостатки: - для реверсивного ЭП требуется реверсивный выпрямитель;
4) Схема силовой части ЭП с АИТ. Рассмотрим схему с управляемым выпрямителем и инвертором на тиристорах.
Схемы с АИТ называют схемами с частотно-токовым управлением. Контур тока обеспечивает стабилизацию выпрямленного тока Достоинствами схем с АИТ являются: - упрощенная схема силовой части; - реверсивный привод может быть организован на нереверсивном выпрямителе. Недостатком схемы является: - невозможность использования АИТ при многодвигательном приводе; - сложн
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-30; просмотров: 2894; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.22.130.228 (0.01 с.) |

 и движения рабочих органов машин.
и движения рабочих органов машин.
 , образуется магнитное поле, вращающееся с угловой скоростью
, образуется магнитное поле, вращающееся с угловой скоростью  , где
, где  - число10
- число10 , где
, где  - критический момент;
- критический момент;  - скольжение.
- скольжение.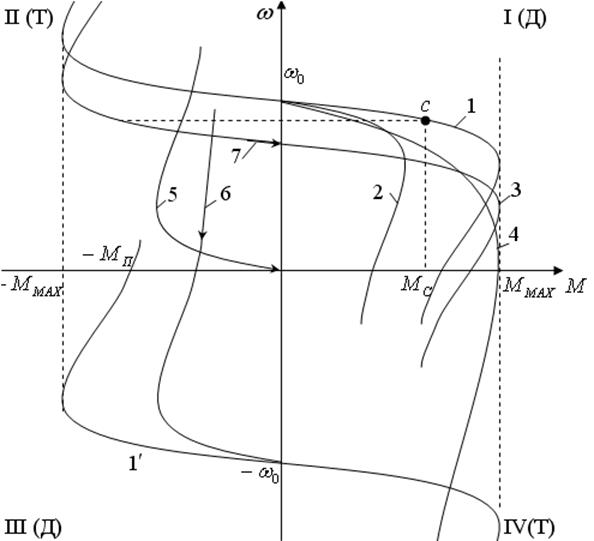
 );
); ,
,  ;
; или
или  ;
; ,
,  .
. , реверс момента. Для торможения до нуля требуется ПЧ, который непрерывно снижает
, реверс момента. Для торможения до нуля требуется ПЧ, который непрерывно снижает  ;
; велико и ограничивает пусковой ток.
велико и ограничивает пусковой ток.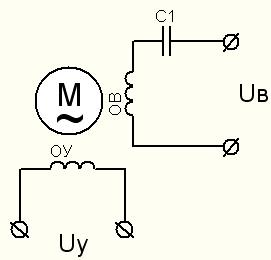
 , при однофазном включении
, при однофазном включении  .
.
 ;
; , где Р – мощность на валу; Р1 – потребляемая мощность.
, где Р – мощность на валу; Р1 – потребляемая мощность.
 - количество тепла, выделяемое (генерируемое) электродвигателем;
- количество тепла, выделяемое (генерируемое) электродвигателем; - теплоемкость двигателя;
- теплоемкость двигателя; - теплоотдача.
- теплоотдача. , где
, где  - постоянная времени нагрева, с;
- постоянная времени нагрева, с;  , град.
, град.



 , где
, где  - скважность;
- скважность;
 (ближайший больший по каталогу). В этом случае двигатель подошел по нагреву.
(ближайший больший по каталогу). В этом случае двигатель подошел по нагреву.
 ,
,  Закон Джоуля-Ленца
Закон Джоуля-Ленца 
 , а
, а  . Отсюда возникает задача расчета потерь.
. Отсюда возникает задача расчета потерь. ,
, по формуле
по формуле 
 ;
; , где
, где  - двигатель подошел по нагреву;
- двигатель подошел по нагреву; ,
,  ;
; 
 ,
, 

 ;
;  - двигатель подошел по нагреву.
- двигатель подошел по нагреву. при Ф-const
при Ф-const ;
;  - двигатель подошел по нагреву.
- двигатель подошел по нагреву. при Ф-const,
при Ф-const,  -const
-const ;
;  - двигатель подошел по нагреву.
- двигатель подошел по нагреву. ,
,  . Более точным является метод средних потерь (прямой метод).
. Более точным является метод средних потерь (прямой метод). .
. ;
; при малых нагрузках; в) генерация высших гармонических колебаний в сеть при коммутации вентилей (для борьбы с ними включают ТОР)
при малых нагрузках; в) генерация высших гармонических колебаний в сеть при коммутации вентилей (для борьбы с ними включают ТОР)

 , причем
, причем  ,
,  ;
;
 . Не содержит высших гармоник в опорном напряжении, обеспечивает четкое открытие тиристоров и применяется в ТП средней и большой мощности.
. Не содержит высших гармоник в опорном напряжении, обеспечивает четкое открытие тиристоров и применяется в ТП средней и большой мощности. . Применяется в маломощных ТП при широком диапазоне регулирования скорости ТП.
. Применяется в маломощных ТП при широком диапазоне регулирования скорости ТП. , где
, где  - код числа.
- код числа. , где
, где  - максимальная выпрямленная ЭДС ТП. Кроме того, ТП имеет запаздывание
- максимальная выпрямленная ЭДС ТП. Кроме того, ТП имеет запаздывание  , среднестатистическое
, среднестатистическое  . При m=6
. При m=6  .
. - нелинейная зависимость
- нелинейная зависимость  .
.
 ;
;  - линейная зависимость
- линейная зависимость 

 , где
, где  - коммутационное сопротивление. образуется в режиме непрерывного тока при перекрытии фаз.
- коммутационное сопротивление. образуется в режиме непрерывного тока при перекрытии фаз.  - динамическое сопротивление тиристоров.
- динамическое сопротивление тиристоров.
 подбирается так, чтобы максимальному измеряемому току
подбирается так, чтобы максимальному измеряемому току  соответствовало
соответствовало  .
.
 подбирается так, чтобы максимальному измеряемому напряжению
подбирается так, чтобы максимальному измеряемому напряжению  соответствовало
соответствовало 

 .
. и
и  , сдвинутым на 90° (рис. 7), можно определить угол поворота ротора, скорость и инкрементный сигнал по положению (моделирование инкрементного датчика).
, сдвинутым на 90° (рис. 7), можно определить угол поворота ротора, скорость и инкрементный сигнал по положению (моделирование инкрементного датчика).


 (т.е. ошибке слежения) на статорной обмотке генерируется напряжение
(т.е. ошибке слежения) на статорной обмотке генерируется напряжение  . Сельсины работают с углами ошибки до 90 градусов, дальше происходит "опрокидывание" сигнала (см.рис.). Существуют также индуктосины – линейные аналоги сельсинов.
. Сельсины работают с углами ошибки до 90 градусов, дальше происходит "опрокидывание" сигнала (см.рис.). Существуют также индуктосины – линейные аналоги сельсинов.

 переходят из временной t-области в р-область изображений, где р (s) – оператор дифференцирования (Лапласа),
переходят из временной t-области в р-область изображений, где р (s) – оператор дифференцирования (Лапласа),  . При этом ДУ заменяются АУ.
. При этом ДУ заменяются АУ.
 ;
; – время последнего вхождения регулируемой величины в 5% зону;
– время последнего вхождения регулируемой величины в 5% зону; ;
; ;
;  ;
; 



 ;
; 


 ;
; 


 для сглаживания пульсаций и помех на коллекторе ТГ. Стабилитрон СТ выполняет роль токовой отсечки
для сглаживания пульсаций и помех на коллекторе ТГ. Стабилитрон СТ выполняет роль токовой отсечки  . При моментах двигателя
. При моментах двигателя  стабилитрон закрыт, при
стабилитрон закрыт, при  стабилитрон открыт и токовая отсечка вступает в действие, приводя к снижению напряжения регулятора скорости вплоть до остановки привода. Механические характеристики при этом называются экскаваторными.
стабилитрон открыт и токовая отсечка вступает в действие, приводя к снижению напряжения регулятора скорости вплоть до остановки привода. Механические характеристики при этом называются экскаваторными.

 ,
,  ,
,  - коэффициенты передачи;
- коэффициенты передачи;  ,
,  - "малые" постоянные преобразователя и датчика скорости;
- "малые" постоянные преобразователя и датчика скорости;  - электромагнитная (якорная) постоянная времени;
- электромагнитная (якорная) постоянная времени;  - электромеханическая постоянная времени.
- электромеханическая постоянная времени. структурная схема примет вид,
структурная схема примет вид,
 - "большие" постоянные времени, определяются
- "большие" постоянные времени, определяются 
 - "малые" постоянные времени не компенсируются, так как являются постоянными времени фильтров.
- "малые" постоянные времени не компенсируются, так как являются постоянными времени фильтров. ;
; - суммарная малая постоянная времени.
- суммарная малая постоянная времени. ; где
; где 
 ;
; ;
; и перерегулированию
и перерегулированию  ;
;
 ;
; ;
; и перерегулированию
и перерегулированию  .
.
 (ипсилон) – относительное напряжение;
(ипсилон) – относительное напряжение; (ню) – относительная частота статора; где
(ню) – относительная частота статора; где  .
. - применяется в станках. Характеризуется постоянством максимального момента.
- применяется в станках. Характеризуется постоянством максимального момента.
 - применяется для привода агрегатов с вентиляторной механической характеристикой: насосы, компрессоры.
- применяется для привода агрегатов с вентиляторной механической характеристикой: насосы, компрессоры.
 - применяется на подъемных механизмах, намоточно-размоточных устройствах.
- применяется на подъемных механизмах, намоточно-размоточных устройствах.

 - фильтр; VD7-12 - возвратный диодный мост для пропуска реактивной энергии со стороны статора АД; БУИ – блок управления инвертором;
- фильтр; VD7-12 - возвратный диодный мост для пропуска реактивной энергии со стороны статора АД; БУИ – блок управления инвертором; - управление напряжением и частотой статора по закону а), б) или в)
- управление напряжением и частотой статора по закону а), б) или в)
 , т.е. стабилизацию тока статора двигателя
, т.е. стабилизацию тока статора двигателя  .
.


