
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Показатели регулирования координат электропривода.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
1. Направление регулирования. Искусственные характеристики, могут располагаться только ниже естественной - однозонное регулирование вниз от основной скорости, только выше естественной - однозонное регулирование вверх от основной скорости, как выше, так и ниже естественной - двухзонное регулирование. 2. Диапазон регулирования - отношение максимальной возможной скорости к минимальной
а) б) Рис. 2.8. К определению диапазона регулирования скорости С жесткостью характеристик связан также еще один показатель - стабильность скорости на искусственных характеристиках. Она может быть низкая - рис. 2.8,а и высокая рис. 2.8,б; иногда требуется абсолютно жесткие характеристики ( 3. Плавность регулирования - возможность получать искусственные характеристики, расположенные как угодно близко друг к другу, - плавное регулирование или, наоборот, возможность иметь лишь несколько фиксированных характеристик - ступенчатое регулирование. 4. Допустимая нагрузка на искусственных характеристиках - очень важный показатель, определяющий надежность электропривода. Рассмотрим здесь лишь длительно допустимую нагрузку, которая определяется допустимым нагревом двигателя. Допустимая нагрузка на естественной характеристике известна по определению - это номинальный момент двигателя Мн. Для упрощения задачи будем считать, пренебрегая изменением теплоотдачи, допустимым током в силовых целях при любой скорости номинальный ток двигателя Iн. Тогда допустимый момент для принудительно охлаждаемого двигателя
будет зависеть от магнитного потока двигателя Ф на соответствующей искусственной характеристике. При регулировании с Ф = Фн = const Мдоп º IнФн = Мн. Грубая оценка (2.5) дает лишь общее представление о допустимых нагрузках и должна уточняться в каждом конкретном случае. 5. Экономичность регулирования оценивается потерями энергии, сопровождающими тот или иной способ регулирования. Иногда экономичность удается грубо оценить, сравнивая полезную мощность
Значительно более серьезные и убедительные оценки экономичности регулирования при сравнении различных способов могут основываться на цикловом КПД
определяемом с учетом конкретных условий работы привода за время цикла tц. 6. Затраты на регулирование можно определить как стоимость дополнительного оборудования Ст. Обор., используемого для осуществления регулирования. Эффективность затрат удобно оценивать сроком их окупаемости Ток 4). Основные уравнения, механическая и электромеханическая характеристика машины постоянного тока независимого возбуждения при U = const.
Рис. 3.2. Схема двигателя постоянного тока независимого возбуждения
Механическую характеристику w(М) получим, подставив в (3.4) ток, выраженный из (3.1):
При заданных U, Ф и R уравнения (3.4) и (3.5) однозначно определяют связь между Скорость
Рис. 3.3. Механические (электромеханические) характеристики электропривода постоянного тока независимого возбуждения при U = const Величина Увеличением нагрузки при определенных условиях, которые рассматриваются ниже, можно прийти к режиму короткого замыкания: При изменении полярности U характеристика займет положение, показанное на рис. 3.3 пунктиром. Участки характеристики между w0 и Мкз, где знаки w и М совпадают, соответствуют, как было условлено ранее, двигательному режиму работы; участки с разными знаками Тормозные режимы - это генераторные режимы, поскольку механическая энергия, поступившая с вала машины, преобразуется в электрическую и передается через электрические зажимы машины. В зависимости от того, куда поступает электрическая энергия, различают три тормозных режима. а) Торможение с отдачей энергии в сеть (рекуперативное) или генераторный режим работы параллельно с сетью Если якорь двигателя вращать от некоторого постороннего источника со скоростью, превышающей скорость идеального холостого хода, то ЭДС двигателя будет больше приложенного напряжения, в результате чего ток в якоре двигателя и момент изменят свой знак. Механическая энергия, поступающая при этом на вал двигателя, преобразуется в электрическую и за вычетом потерь в двигателе рекуперируется в сеть. На механических характеристиках торможению с отдачей энергии в сеть соответствуют участки ab и a’b’ (рис. 3.3)
б) Торможение противовключением или генераторный режим работы последовательно с сетью В режиме противовключения изменяет знак скорость двигателя при сохранении знака момента или знак момента двигателя при сохранении знака скорости. Первый случай имеет место при воздействии активного момента статической нагрузки, превышающего момент короткого замыкания на данной характеристике. В результате изменения знака скорости ЭДС двигателя будет совпадать с приложенным напряжением, и ток в якоре определится выражением:
Второй случай используется для остановки двигателя путем изменения полярности напряжения, подводимого к его якорю. Вследствие механической инерции скорость двигателя и ЭДС в начальный момент сохраняются неизменными, а ток будет равен:
На механических характеристиках (рис. 3.3) торможению противовключением соответствуют участки cd и c’d’. В режиме торможения противовключением энергии поступает в привод и со стороны механизма, и от сети и рассеивается в сопротивлениях якорной цепи; в предыдущем случае энергия, поступающая от механизма, передавалась в сеть. в) Динамическое торможение или генераторный режим работы независимо от сети Если якорная цепь отключена от источника питания и замкнута на внешний резистор, то при вращении двигателя от внешнего источника или по инерции в якорной цепи индуцируется ЭДС и протекает ток 5. Основные уравнения, механическая и электромеханическая характеристика машины постоянного тока независимого возбуждения при I = const. В ряде применений якорная цепь двигателя постоянного тока независимого возбуждения питается не от источника напряжения, как в предыдущем случае, а от источника тока (I=const) - рис. 3.4. При этом, естественно, сохраняют силу фундаментальные соотношения (3.1)-(3.3), однако свойства электропривода радикально изменяются.
Рис. 3.4. Схема двигателя постоянного тока независимого возбуждения при питании от источника тока
Электромеханическая I = const (3.6) и М = kФI = const (3.7) и привод приобретает новое свойство “источника момента”. Это связано с тем, что источник питания - источник тока - нейтрализует действие ЭДС, она теперь уже не играет роли внутреннего регулятора и не влияет на скорость. В свою очередь, напряжение U становится зависимой переменной U = E + IR = kФw + IR, (3.8) и характеристика
Рис. 3.5. Характеристики электропривода при питании якоря от источника тока
Режима идеального холостого хода в рассматриваемой структуре нет - “источник момента”. Двигательный режим соответствует участку ab в I квадранте: Мw > 0, т.е. механическая энергия поступает к потребителю - технологической машине, UI > 0 - электрическая энергия поступает к своему потребителю - двигателю. Режим короткого замыкания - точка a, здесь Е = 0 и U = IR. На участке ac Мw < 0, т.е. механическая энергия поступает от технологической машины и, преобразуясь в электрическую, передается в якорную цепь; по-прежнему IU > 0 - электрическая энергия от источника тока также поступает в якорную цепь. Этот режим мы определили раньше как торможение противовключением. В точке с U = 0 - режим динамического торможения: вся поступившая механическая энергия рассеивается в сопротивлениях якорной цепи. И, наконец, на участке cd Мw < 0 и UI< 0 - рекуперативное торможение, если источник тока позволяет передать энергию в сеть. Если источник тока обладает односторонней проводимостью (пунктир на рис. 3.4) этого режима не будет, и электропривод будет продолжать работать в режиме динамического торможения (пунктир на рис. 3.5). 6. Основные уравнения, механическая характеристика машины постоянного тока последовательного возбуждения при U = const. В электроприводах постоянного тока иногда используются двигатели с последовательным возбуждением, когда специально выполненная обмотка возбуждения включена последовательно с обмоткой якоря - рис. 3.6
Рис. 3.6. Схема двигателя постоянного тока последовательного возбуждения Для двигателя последовательного возбуждения, как и для других двигателей постоянного тока при питании якоря от источника напряжения (U=const), справедливы уравнения (3.4) и (3.5), однако, если для двигателя независимого возбуждения поток не зависит от тока нагрузки, то для двигателя последовательного возбуждения поток является функцией тока нагрузки. Зависимость Ф = j(I) - характеристика намагничивания - не имеет простого аналитического выражения, ее примерный вид изображен на рис. 3.7.
Рис. 3.7. Характеристика намагничивания машины постоянного тока В первом приближении зависимость между скоростью двигателя и развиваемым им моментом в установившемся режиме можно найти в предположении, что поток возбуждения и ток в якоре двигателя связаны между собой линейной зависимостью (пунктир на рис. 3.7):
Тогда
а поскольку M = kФI = kaI2, то
Таким образом, при сделанном допущении механическая характеристика двигателя последовательного возбуждения изображается гиперболой (рис. 3.8); одной из ее асимптот является ось ординат, а другой - прямая, параллельная оси абсцисс,
Рис. 3.8. Механическая характеристика двигателя последовательного возбуждения Жесткость механической характеристики Полученные уравнения дают лишь общее представление о характеристиках электропривода с двигателем последовательного возбуждения, так как в действительности магнитная система машины насыщена и кривая намагничивания весьма далека от прямой. Поэтому в практических целях обычно пользуются универсальными характеристиками для серии машин - рис. 3.9, построенными в относительных величинах
Рис. 3.9. Характеристики двигателя последовательного возбуждения в относительных величинах
Электропривод с двигателями последовательного возбуждения в нормальной схеме (U=const) может работать в тех же энергетических режимах, что и привод с двигателями независимого возбуждения, за исключением режима идеального холостого хода и генераторного режима параллельно с сетью (рекуперативное торможение), поскольку при нагрузке, стремящейся к нулю, к нулю стремится и магнитный поток, ось 7. Особенности режимов работы машины постоянного тока последовательного возбуждения при U = const. Некоторые особенности при последовательном возбуждении имеет режим динамического торможения. Если якорь вращающейся машины отключить от источника напряжения и замкнуть на внешний резистор (рис. 3.10, схема слева), то под действием потока остаточного магнетизма (Фост на рис. 3.7) в проводниках якоря возникает некоторая ЭДС Еост, которая вызовет в замкнутой цепи ток. Этот ток, протекая по обмотке возбуждения в обратном против исходного направления размагнитит машину (Ф = 0) и тормозного момента создано не будет.
Рис. 3.10. К режиму динамического торможения с самовозбуждением
Для того, чтобы получить тормозной момент, ток, созданный Еост, должен протекать в том же, что и раньше, направлении, усиливая магнитный поток, т.е. создавая самовозбуждение. Это условие выполнится, если при переходе на режим торможения переключить обмотку возбуждения как показано на рис. 3.10, схема справа. Ток, создаваемый увеличивающейся ЭДС, изменит знак, момент будет направлен против движения, т.е. станет тормозным. Работа машины постоянного тока с самовозбуждением возможна лишь при определенных условиях, а именно при таких значениях скорости и сопротивления R цепи якоря, чтобы имело место равенство E = IR, (3.11) Существованию этого равенства отвечает наличие точки пересечения кривых
а) б) Рис. 3.11. Характеристики динамического торможения с самовозбуждением Наименьшая скорость, при которой машина может самовозбуждаться, будет при Rдоб = 0, то есть при замкнутой накоротко якорной цепи машины. Построение механической характеристики в режиме динамического торможения при самовозбуждении можно произвести, исходя из уравнения баланса мощностей. Мощность, развиваемая двигателем в режиме динамического торможения, целиком рассеивается в сопротивлениях якорного контура, то есть (-I) 2R = - Mw, откуда
Зная R и задаваясь током I, по универсальной характеристике определяют соответствующий этому току момент М, вычисляют скорость В электроприводах постоянного тока иногда используются двигатели смешанного возбуждения, имеющие две обмотки возбуждения, одна из которых включена последовательно в якорную цепь, а другая имеет независимое питание. Двигатели последовательного возбуждения могут получать питание не только от источника напряжения, что было рассмотрено выше, но и от источника тока. Поскольку при этом магнитный поток будет неизменным, сохраняются и основные свойства электропривода, рассмотренные ранее.
|
||||
|
|
Последнее изменение этой страницы: 2016-08-06; просмотров: 716; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 52.14.125.137 (0.011 с.) |

 при заданных изменениях момента нагрузки - рис. 2.8. Легко видеть, что одинаковым естественным характеристикам и изменениям момента
при заданных изменениях момента нагрузки - рис. 2.8. Легко видеть, что одинаковым естественным характеристикам и изменениям момента  могут соответствовать сильно различающиеся диапазоны регулирования, что связано с жесткостью искусственных характеристик.
могут соответствовать сильно различающиеся диапазоны регулирования, что связано с жесткостью искусственных характеристик.
 ), иногда, напротив, нужны очень мягкие характеристики (регулирование момента).
), иногда, напротив, нужны очень мягкие характеристики (регулирование момента). (2.5)
(2.5) с потребляемой из сети Р1, т.е. определяя потери
с потребляемой из сети Р1, т.е. определяя потери  или вычисляя КПД
или вычисляя КПД  в некоторой характерной точке:
в некоторой характерной точке: . (2.6)
. (2.6)
 , (2.7)
, (2.7) :
: (3.4)
(3.4)
 . (3.5)
. (3.5) , I и М в любых режимах. Характеристики
, I и М в любых режимах. Характеристики  и
и  это прямые линии, проходящие через две характерные точки: М = 0,
это прямые линии, проходящие через две характерные точки: М = 0,  и w = 0, I = Iкз, М = Мкз; при Ф = const они различаются лишь масштабами по оси абсцисс.
и w = 0, I = Iкз, М = Мкз; при Ф = const они различаются лишь масштабами по оси абсцисс. (рис. 3.3) соответствует режиму идеального холостого хода: М = 0, E = U и направлены встречно.
(рис. 3.3) соответствует режиму идеального холостого хода: М = 0, E = U и направлены встречно.
 - перепад скорости под влиянием нагрузки.
- перепад скорости под влиянием нагрузки. ,
,  , M = k ФIкз = Mкз.
, M = k ФIкз = Mкз. и М - тормозным режимам.
и М - тормозным режимам.

 , создающий момент. Характеристики проходят через начало координат - штрих-пунктир на рис. 3.3.
, создающий момент. Характеристики проходят через начало координат - штрих-пунктир на рис. 3.3.
 и механическая
и механическая  характеристики представлены теперь вертикальными прямыми (рис. 3.5)
характеристики представлены теперь вертикальными прямыми (рис. 3.5) (рис. 3.5) определяет энергетические режимы работы электропривода.
(рис. 3.5) определяет энергетические режимы работы электропривода.

 .
. ,
, .
. .
.
 двигателя последовательного возбуждения переменна и возрастает с увеличением нагрузки.
двигателя последовательного возбуждения переменна и возрастает с увеличением нагрузки. и
и  , Iн и Мн - номинальные величины двигателя, Rдоп = 0.
, Iн и Мн - номинальные величины двигателя, Rдоп = 0.
 - асимптота механической характеристики.
- асимптота механической характеристики.
 (при данной скорости) и прямой IR = f(I) - рис. 3.11. Очевидно, что чем больше R, тем при большей скорости произойдет самовозбуждение машины.
(при данной скорости) и прямой IR = f(I) - рис. 3.11. Очевидно, что чем больше R, тем при большей скорости произойдет самовозбуждение машины.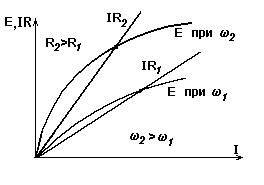

 . (3.12)
. (3.12) и т.д. Характер зависимой
и т.д. Характер зависимой  в тормозном режиме при самовозбуждении изображен на рис. 3.11,б.
в тормозном режиме при самовозбуждении изображен на рис. 3.11,б.


