
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Электропривод промышленных роботовСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте Промышленный робот (ПР) – машина, содержащая одну или несколько механических рук (манипуляторов) и способная автоматически перемещать захватное устройство или инструмент по программе. Роботы различаются по: - грузоподъёмности; - числу степеней подвижности; - системе координат основных положений. Оснащаются роботы цикловыми или числовыми системами программного управления; часто используется задание программы методом обучения, когда захват или инструмент по командам с кнопочного пульта проводится через нужные точки траектории, которые фиксируются в памяти робота. Чтобы роботы могли приспосабливаться к изменениям обстановки, например, работать с произвольно расположенными деталями, их оснащают «органами чувств» - датчиками усилий, локаторами, телекамерами, адаптивными системами управления. Применение роботов позволяет освободить человека от тяжёлых или ручных операций, включая и вредные работы, перейти к комплексной автоматизации серийного производства. Подавляющее большинство роботов используется в составе роботизированных технологических комплексов. Важнейшей составной частью роботов является привод, который управляет по заданной программе движения его механизмов. Электропривод современного промышленного робота представляет собой комплекс приводов, каждый из которых управляет определённой степенью подвижности робота. Рассмотрим наиболее распространённую функциональную схему управляемого автоматизированного электропривода (рис. 1.27).
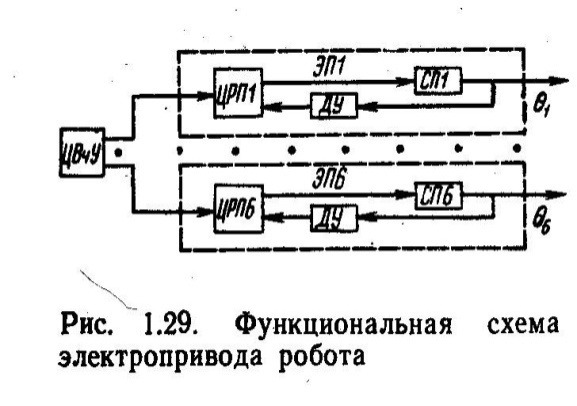
Рис. 1.27. Функциональная схема электропривода робота.
Все шесть электроприводов (ЭП1 – ЭП6) управляются от общего центрального вычислительного устройства (ЦВчУ), которое решает траекторные задачи движения робота и выдаёт управляющие сигналы на цифровые регуляторы положения (ЦРП1 – ЦРП6) отдельных приводов. Цифровые регуляторы положения управляют сервоприводами (СП1 – СП6) в соответствии с сигналами от ЦВчУ и датчиков угла (ДУ) Независимо от конкретной схемы электропривод ПР состоит из следующих элементов: - исполнительного элемента (двигателя); - преобразователя - датчиков обратной связи по току; - скорости и углу; регуляторов тока и угла В настоящее время выпускают сервоприводы, которые конструктивно объединяют двигатель, преобразователь, датчики и регуляторы скорости и тока (рис. 1.28).
Рис. 1.28. Функциональная схема сервопривода робота.
Данная функциональная схема электропривода представляет собой аналого-цифровую систему автоматического управления. В ней сочетаются преимущества комбинированной аналоговой системы, работающей по принципу трёхконтурной системы подчинённого регулирования, с достоинствами цифровой системы (высокая точность цифровых датчиков, удобство программирования работы и т.д.). Наряду с двигателями ПТ в электроприводах ПР используют асинхронные двигатели (АД), однако их применение пока ограничено. Это объясняется сложностью и высокой стоимостью электронных преобразователей, применяемых для регулирования частоты вращения. Тем не менее в ПР грузоподъёмностью свыше 40 кг их использование вполне оправданно. В электроприводах находят применение и так называемые и так называемые вентильные двигатели. Вентильный двигатель (ВД) представляет собой электропривод с синхронным двигателем и инвертором, управление которого зависит от угла поворота ротора двигателя. На рис. 1.29 показана структурная схема управления частотой вращения двигателя М, которое осуществляется блоком управления (БУ) по сигналу датчика (Д).
Регулировать частоту вращения В электроприводах, отличающихся высоким моментом инерции приводного механизма и требующих быстрого изменения режимов работы и обеспечения реверса, необходимо плавно менять частоту напряжения питающего СД, чтобы СД не выходил из синхронного режима работы. Это достаточно сложно, особенно в тех случаях, когда начальная частота составляет доли герц, а затем возрастает до максимального значения. При этом целесообразно применять метод частотного регулирования с самосинхронизацией. Метод подразумевает управление преобразователем частоты от системы датчиков положения ротора. Вентильные двигатели могут получать питание от сети как постоянного, так и переменного тока. Использование ВД позволяет осуществить и бессточное возбуждение, что увеличивает частоту вращения до 4500 – 6000 об/мин и повышает надёжность двигателя. Рассмотренные ВД имеют улучшенные массогабаритные характеристики. Оригинальная конструкция ротора позволяет снизить электромеханическую постоянную времени двигателя, т.е. уменьшить его инерционность. Использование широтно-импульсных (или частотно-импульсных) преобразователей для управления двигателем обеспечивает высокую равномерность вращения и при малых скоростях, а это, в свою очередь, позволяет повысить точность позиционирования роботов. Надёжность ВД существенно зависит от надёжности преобразователей частоты, в которые включено большое число полупроводниковых элементов. Развитие современной элементной базы и создание мощных тиристоров позволит обеспечить надёжную эксплуатацию ВД в производственных условиях. Всё большее распространение в ПР получает дискретный привод с шаговым двигателем (ШД), который через механическую передачу соединяется с исполнительным механизмом. Использование ШД даёт возможность преобразовывать управляющие импульсные сигналы в угол поворота вала без датчика обратной связи. Шаговый дискретный разомкнутый привод с различными типами шаговых двигателей достаточно широко применяется в ПР. Так как привод не имеет датчиков обратных связей, то значительно упрощается структура и функциональная схема привода. Шаг двигателя можно выбрать по условиям требуемой точности произвольно малым, поэтому шаговый привод воспроизводит все виды механического движения, доступные непрерывным системам проводов. Перечисленные особенности позволяют определить дискретный привод с шаговым двигателем как синхронно-импульсный следящий привод, сочетающий в себе возможности глубокого частотного регулирования угловой скорости (до 0) с возможностями числового задания пути.
|
||
|
|
Последнее изменение этой страницы: 2016-09-19; просмотров: 1678; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.007 с.) |


 (положения).
(положения).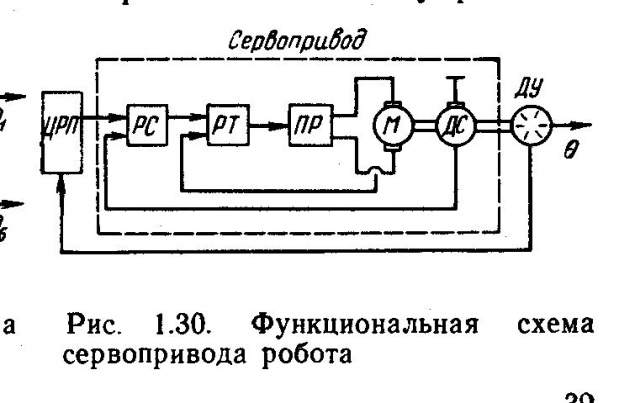
 Рис. 1.29. Структурная схема управления частотой вращения асинхронного двигателя.
Рис. 1.29. Структурная схема управления частотой вращения асинхронного двигателя. СД можно двумя способами: изменением числа пар полюсов 2р или изменением частоты (f) питающего напряжения. Первый способ в большинстве случаев нецелесообразен, так как приводит к усложнению конструкции. Поэтому применяют второй способ.
СД можно двумя способами: изменением числа пар полюсов 2р или изменением частоты (f) питающего напряжения. Первый способ в большинстве случаев нецелесообразен, так как приводит к усложнению конструкции. Поэтому применяют второй способ.


