
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Переходные режимы и нагрузочные диаграммы электроприводовСодержание книги
Поиск на нашем сайте Вращающий момент двигателя М передаётся через его вал непосредственно или через передаточное устройство валу рабочей машины, которая оказывает сопротивление, измеряемое моментом статического сопротивления
где
Момент статического сопротивления рабочей машины
где
Зависимость В зависимости от направления момента статического сопротивления он может оказывать не только тормозящее действие, но и способствовать движению двигателя производственного агрегата. В первом случае момент
Рис. 1. 2 - Механические характеристики рабочих машин: 1 – не зависящая от скорости; 2. – нелинейно-возрастающая; 3 – линейно-возрастающая; 4. – нелинейно-спадающая.
В том случае, когда моменты Работа электроприводов определяется взаимосвязанными переходными механическими, электромагнитными и тепловыми процессами. Первые два из них отличаются кратковременностью и заканчиваются значительно раньше тепловых процессов, которые вследствие большой тепловой инерции двигателей практически не влияют на переходные механические и электромагнитные процессы. При изучении механических переходных процессов производственного агрегата с постоянным моментом инерции J, приведенным к скорости вала двигателя, используют основное уравнение движения электропривода:
Результирующий, или суммарный, момент инерции производственного агрегата J, приведенный к скорости вала двигателя, при наличии нескольких звеньев системы с массами, имеющими моменты инерции
где Момент инерции ротора или якоря
где
Инерционность производственного агрегата по сравнению с инерционностью ротора или якоря двигателя оценивают коэффициентом инерции
Моменты инерции простейших тел зависят от их массы и геометрических размеров, которые связаны между собой определёнными аналитическими зависимостями (табл. 1.1).
Таблица 1.1. Моменты инерции простейших тел
Наибольшая доля в результирующем моменте инерции Это позволяет результирующий момент инерции производственного агрегата с вращающимися массами, приведенный к скорости вала двигателя, определить так:
где
Зная результирующий момент инерции производственного агрегата, приведенный к скорости вала двигателя, можно по основному уравнению движения электропривода
определить момент на валу двигателя во время переходного режима, при котором работа производственного агрегата сопровождается ускорением или замедлением движущихся звеньев, а динамический момент
принимает соответственно положительное или отрицательное значение. Поскольку скорость вала двигателя
основное уравнение движения электропривода можно записать в таком виде:
где n – частота вращения вала двигателя, При исследовании механических переходных режимов производственного агрегата следует в основном уравнении движения электропривода
учитывать знаки моментов, определяемые направлением их действия по движению привода или противоположно ему. Длительность переходных режимов производственного агрегата с постоянным моментом инерции движущихся звеньев при изменении скорости от
Для решения этого интеграла необходимо располагать зависимостями время изменения скорости от
Из этой формулы можно найти: время пуска
время выбега
и время остановки при электрическом торможении
где По времени выбега можно судить о механических потерях в производственном агрегате. Однотипные устройства с большим временем пробега отличаются от других меньшими механическими потерями, а, следовательно, лучшим качеством изготовления, ремонта, наладки и эксплуатации. Если зависимости
Рис. 1.3. Определение времени пуска производственного агрегата.
Динамические моменты В точке
необходимо, выбрав масштабы
Аналогично определяют время торможения Работу электроприводов в установившихся и переходных режимах обычно отображают нагрузочными диаграммами моментов и мощностей, т.е. графическими зависимостями момента M и мощности P двигателя от времени. Если пренебречь незначительными потерями энергии в кинематических звеньях передаточного устройства производственного агрегата, то при установившемся режиме эти диаграммы М(t) и P(t) для двигателя и рабочей машины идентичны.
Рис. 1.4. Определение времени торможения производственного агрегата
При переходных режимах, когда проявляется действие динамических моментов, эти диаграммы различны, поскольку двигателю приходится преодолевать не только статические, но и динамические нагрузки. Для построения нагрузочных диаграмм моментов и мощностей необходимо предварительно, пользуясь диаграммой статических моментов, выбрать по каталогу электрооборудования двигатель, мощность которого близка или несколько больше расчётной, а за тем вычислить результирующий момент инерции движущихся масс производственного агрегата, приведенный к скорости вала двигателя. Зная закон изменения скорости вала двигателя во времени
Алгебраическое суммирование статического
уравновешиваемый моментом двигателя в процессе его работы, и построить моментов нагрузочную диаграмму Перемножением соответствующих ординат графиков В производственных агрегатах с малым результирующим моментом инерции, работающих при незначительном изменении скорости во времени, динамические моменты малы, и поэтому нагрузочные диаграммы электропривода и рабочей машины практически совпадают друг с другом.
Рис. 1.5. Построение нагрузочной диаграммы электропривода
В условиях действующих установок нагрузочные диаграммы электропривода можно получить экспериментально с помощью самопишущих электроизмерительных приборов, включённых в цепь двигателя производственного агрегата.
|
|||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-09-19; просмотров: 642; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.220 (0.008 с.) |

 определяемого экспериментально или расчётом с использованием формулы
определяемого экспериментально или расчётом с использованием формулы
 - момент статического сопротивления рабочей машины при скорости
- момент статического сопротивления рабочей машины при скорости  ;
; - момент сопротивления трения в движущихся частях или момент при холостом ходе рабочей машины;
- момент сопротивления трения в движущихся частях или момент при холостом ходе рабочей машины; - момент статического сопротивления рабочей машины при номинальной нагрузке и скорости
- момент статического сопротивления рабочей машины при номинальной нагрузке и скорости  ;
; – коэффициент, отражающий характер изменения момента сопротивления при изменении скорости, который для большинства рабочих машин равен -1, 0, +1, +2 и только при очень больших скоростях достигает значений +3, +4.
– коэффициент, отражающий характер изменения момента сопротивления при изменении скорости, который для большинства рабочих машин равен -1, 0, +1, +2 и только при очень больших скоростях достигает значений +3, +4. обычно приводят к скорости вала двигателя Ω по формуле
обычно приводят к скорости вала двигателя Ω по формуле
 - момент статического сопротивления рабочей машины, приведенный к скорости вала двигателя;
- момент статического сопротивления рабочей машины, приведенный к скорости вала двигателя; - передаточное число от вала двигателя к валу рабочей машины;
- передаточное число от вала двигателя к валу рабочей машины; - КПД передачи.
- КПД передачи. называют механической характеристикой двигателя (рис. 1. 2).
называют механической характеристикой двигателя (рис. 1. 2).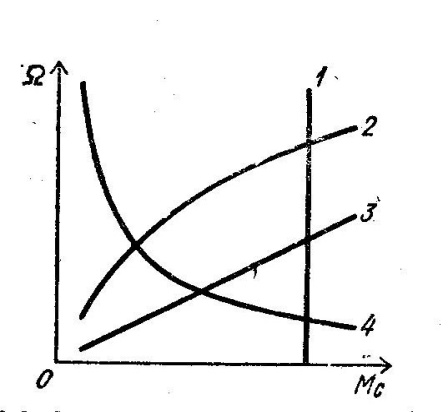
 и
и 
 вращающимися с различными скоростями
вращающимися с различными скоростями  и поступательно движущихся масс
и поступательно движущихся масс  со скоростями
со скоростями  находят так:
находят так:
 - суммарный момент инерции ротора или якоря двигателя и деталей, расположенных на его валу.
- суммарный момент инерции ротора или якоря двигателя и деталей, расположенных на его валу. связан с его массой
связан с его массой  и диаметром инерции D зависимостью
и диаметром инерции D зависимостью
 - сила тяжести, отнесённая к ротору или якорю, H;
- сила тяжести, отнесённая к ротору или якорю, H; - ускорение свободного падения,
- ускорение свободного падения,  ;
; - маховый момент,
- маховый момент, 






 обусловлена массами, вращающимися со скоростью вала двигателя
обусловлена массами, вращающимися со скоростью вала двигателя  , так как существование неравенства
, так как существование неравенства  резко снижает долю участия масс, вращающихся со скоростями, меньшими скорости вала двигателя
резко снижает долю участия масс, вращающихся со скоростями, меньшими скорости вала двигателя 
 - 1,1…1,3 – коэффициент, приближённо учитывающий моменты инерции отдельных вращающихся звеньев передаточного устройства;
- 1,1…1,3 – коэффициент, приближённо учитывающий моменты инерции отдельных вращающихся звеньев передаточного устройства; - суммарный момент инерции движущихся звеньев рабочей машины и деталей, закреплённых на её валу, вращающихся со скоростью
- суммарный момент инерции движущихся звеньев рабочей машины и деталей, закреплённых на её валу, вращающихся со скоростью 





 определяют интегрированием основного уравнения движения электропривода и находят, что
определяют интегрированием основного уравнения движения электропривода и находят, что
 и
и  В частном случае, когда
В частном случае, когда  и
и  либо
либо 
 до
до  или частоты вращения от
или частоты вращения от  до
до  будет
будет



 - тормозной момент двигателя.
- тормозной момент двигателя. заданы графиками, время пуска
заданы графиками, время пуска  определяют графическим методом, при котором по механическим характеристикам двигателя
определяют графическим методом, при котором по механическим характеристикам двигателя  и рабочей машины
и рабочей машины  строят совместную механическую характеристику производственного агрегата
строят совместную механическую характеристику производственного агрегата  и заменяют её ступенчатой линией с участками
и заменяют её ступенчатой линией с участками 
 отвечающие участкам 1, 2, 3, переносят на ось ординат и полученные точки
отвечающие участкам 1, 2, 3, переносят на ось ординат и полученные точки  соединяют с точкой оси абсцисс 0′, отстоящей от начала координат 0, на расстояние, прямо пропорциональное результирующему моменту инерции J. Затем из начала координат проводят прямую
соединяют с точкой оси абсцисс 0′, отстоящей от начала координат 0, на расстояние, прямо пропорциональное результирующему моменту инерции J. Затем из начала координат проводят прямую  параллельно отрезку
параллельно отрезку  , которая характеризует функцию
, которая характеризует функцию  для участка 1. Для остальных участков ступенчатой характеристики динамических моментов кривую скорости электропривода строят аналогично, так что
для участка 1. Для остальных участков ступенчатой характеристики динамических моментов кривую скорости электропривода строят аналогично, так что  и
и 
 разгон заканчивается и отрезок
разгон заканчивается и отрезок  в масштабе
в масштабе  определяет длительность пуска
определяет длительность пуска  , момента инерции -
, момента инерции -  , скорости -
, скорости -  и времени
и времени 
 ,
,  , найти масштаб времени по формуле
, найти масштаб времени по формуле
 производственного агрегата при динамическом торможении электропривода по заданным механическим характеристикам двигателя
производственного агрегата при динамическом торможении электропривода по заданным механическим характеристикам двигателя 
 и динамического момента во времени
и динамического момента во времени  (рис. 1.5), учитывая, что динамический момент
(рис. 1.5), учитывая, что динамический момент
 и динамического
и динамического  моментов позволяет определить суммарный момент
моментов позволяет определить суммарный момент ,
,
 устанавливают зависимость
устанавливают зависимость  так как мощность
так как мощность 




