Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Механические характеристики рабочих машин и электродвигателейСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
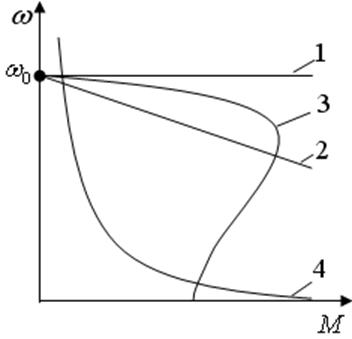
1. Механические характеристики рабочих машин (зависимость угловой скорости механизма от момента сопротивления на его валу) 1 – не зависящая от скорости; 2 – линейно зависящая; 3 – нелинейно зависящая (вентиляторная); 4 – намоточно-размоточная.
2. Механические характеристики ЭД (зависимость угловой скорости двигателя от момента сопротивления на его валу) 1 – синхронный двигатель (СД); 2 – двигатель постоянного тока с независимым возбуждением (ДПТ с НВ) и вентильный двигатель (ВД); 3 – трехфазный асинхронный двигатель (АД); 4 – двигатель постоянного тока с последовательным возбуждением (ДПТ с ПВ);
При выборе привода согласование механических характеристик двигателя и рабочей машины происходит по следующим параметрам: а) по диапазону регулирования скорости б) по нагрузке ( в) по энергетическим показателям (
Механические характеристики ДПТ
1) Механические характеристики ДПТ с независимым возбуждением
Уравнение механической характеристики где
1 – Естественная характеристика при всех номинальных параметрах ( 1' – Инверсная (реверсная) характеристика. Для реверса ДПТ с НВ 2 – Управление напряжением якоря 3 – Управление магнитным потоком 4 – Управление сопротивлением Наиболее экономичный способ регулирования скорости ДПТ связан с изменением напряжения, подводимого к якорю, а не сопротивлений цепи якоря или обмотки возбуждения. Для регулирования напряжения необходимы специальные силовые преобразователи (управляемые выпрямители).
Тормозные режимы: 5 – Динамическое торможение: двигатель отключается от сети, якорь закорачивается на сопротивление,; 6 – Торможение противотоком; 7 – Рекуперация (отдача энергии двигателем обратно в сеть). Условия рекуперации:
2) Механические характеристики ДПТ с последовательным возбуждением
1 – естественная характеристика; 2 - 3 – динамическое торможение; 4 – режим противотока. У данных ДПТ
Механические характеристики асинхронных двигателей (АД)
1) Механические характеристики 3-фазных АД
Асинхронный электродвигатель имеет трехфазную обмотку статора. При подаче на неё трехфазного напряжения частотой пар полюсов статора (определяется укладкой обмотки). Ротор АД чаще всего выполняется короткозамкнутым ("беличья клетка"). В подъёмных и транспортных машинах применяют фазный ротор, где обмотка ротора через контакные кольца выводится на неподвижное основание и соединяется с добавочными сопротивлениями. В настоящее время АД по умолчанию применяют для привода большинства объектов.
При описании АД электрические параметры двигателя имеют индексы: 1 – статор; 2 – ротор. При R1=0 механическая характеристика описывается формулой
1 – естественная ( 1' – реверс (меняются местами две из трех фаз); 2 - 3 - 4 – АД с фазным ротором тормозные режимы 5 – динамическое торможение: на обмотку статора подается постоянный ток, тогда раскручиваемый ротор будет тормозиться; 6 – противоток (реверс): (меняются местами две фазы); 7 – рекуперация Пуск АД: Для ограничения пусковых токов АД большой мощности или получения плавного пуска асинхронного привода применяют: 1) включение активных или индуктивных сопротивлений в цепи статора, которые выводятся в конце пуска; 2) "частотный" пуск через преобразователь, плавно изменяющий частоту питания двигателя 3) пуск с фазным ротором; 4) реакторный пуск – включение индуктивных сопротивлений в цепь ротора. Вначале пуска частота тока в роторе близка к частоте сети, индуктивное сопротивление
2) Механические характеристики двухфазных АД
Выпускаются на мощность до 1 кВт. Могут выполняться со сплошным или полым ротором. ОВ, ОУ – соответственно обмотки возбуждения и управления; Для сдвига фаз в цепь ОВ последовательно включают конденсатор емкостью 1-2 мкФ на каждые 100 Вт.
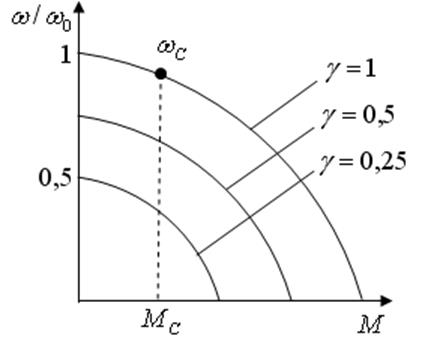
Примечание: при частотном управлении характеристики станут линейными и параллельными друг другу, при фазовом – только линейными.
|
||||
|
|
Последнее изменение этой страницы: 2016-12-30; просмотров: 1473; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.119.29.246 (0.008 с.) |

 :
:
 :
:
 ;
; ,
,  );
); ).
).
 ;
; - конструктивная постоянная двигателя,
- конструктивная постоянная двигателя,  - число пар полюсов;
- число пар полюсов;  - число активных стержней;
- число активных стержней;  - число пар параллельных ветвей (количество обмоток в секции);
- число пар параллельных ветвей (количество обмоток в секции);  - сопротивление якорной цепи.
- сопротивление якорной цепи.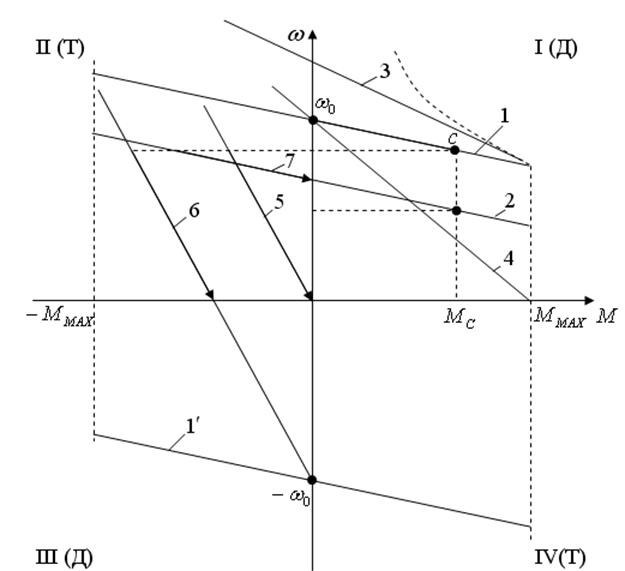
 )
) (1-я зона управления)
(1-я зона управления) (2-я зона управления)
(2-я зона управления)
 , реверс момента. Реализуется с помощью управляемого преобразователя, включенного в цепь якоря двигателя.
, реверс момента. Реализуется с помощью управляемого преобразователя, включенного в цепь якоря двигателя.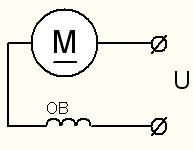
 ;
;  ;
;  ;
; т.е. механическая характеристика нелинейная.
т.е. механическая характеристика нелинейная.
 - ввод добавочного сопротивления;
- ввод добавочного сопротивления; , т.е. двигатель нельзя включать без нагрузки и применять ременные передачи. По этой же причине рекуперация невозможна. Применяется в подъемных и транспортных машинах.
, т.е. двигатель нельзя включать без нагрузки и применять ременные передачи. По этой же причине рекуперация невозможна. Применяется в подъемных и транспортных машинах.
 , образуется магнитное поле, вращающееся с угловой скоростью
, образуется магнитное поле, вращающееся с угловой скоростью  , где
, где  - число10
- число10 , где
, где  - критический момент;
- критический момент;  - скольжение.
- скольжение.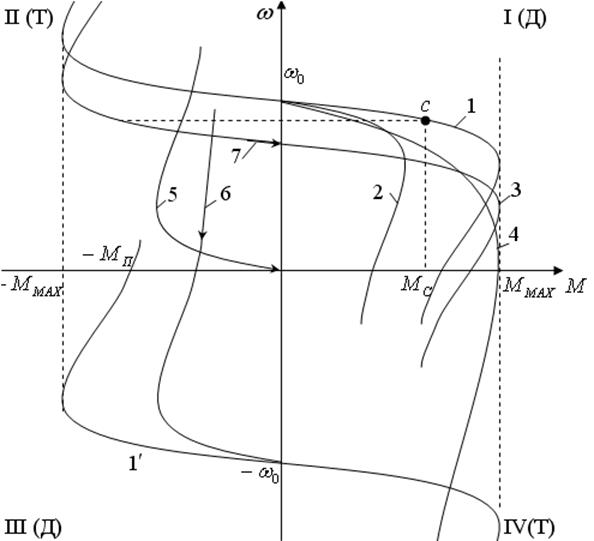
 );
); ,
,  ;
; или
или  ;
; ,
,  .
. , реверс момента. Для торможения до нуля требуется ПЧ, который непрерывно снижает
, реверс момента. Для торможения до нуля требуется ПЧ, который непрерывно снижает  ;
; велико и ограничивает пусковой ток.
велико и ограничивает пусковой ток.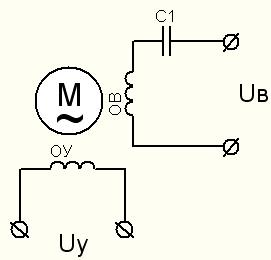
 , при однофазном включении
, при однофазном включении  .
.