
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Типовые узлы защиты электроприводаСодержание книги
Поиск на нашем сайте
1. Максимальная защита – от коротких замыканий. Реализуется с помощью реле максимального тока (РМ), плавких предохранителей (ПП) и автоматических выключателей (АВ), токоограничивающих реакторов (ТОР) ТОР ограничивает рост токов КЗ для обеспечения срабатывания максимальной защиты до того, как выйдут из строя силовые вентили. Уставки: АВ, РМ 2. Тепловая защита – от длительных, но небольших перегрузок по току. Реализуется с помощью теплового реле (РТ), автоматических выключателей (биметаллическая пластина). Уставка: АВ, РТ 3. Нулевая (минимальная) защита – от самозапуска двигателя. Реализуется с помощью реле напряжения, линейных контакторов, магнитных пускателей. ГОСТ допускает колебание напряжения сети от –15% до +10%. Уставка: 4. Защита от обрыва поля двигателя. Реализуется с помощью реле обрыва поля (РОП). Уставка: 5. Защита от перенапряжений элементов ЭП: ОВ, силовых тиристоров (транзисторов), обмоток трансформатора. Осуществляется с помощью RC-цепей, диодов, ПП. 6. Защита питающей сети от высших гармонических колебаний, генерируемых вентильным преобразователем. Осуществляется с помощью ТОР (медные стержни имеют большую индуктивность).
Типовые регуляторы
1) Статика описывается алгебраическими уравнениями (АУ), а динамика – дифференциальными ДУ. Для облегчения исследования динамики сложных электромеханических систем с помощью преобразования Лапласа Передаточной функцией (ПФ) W(p) называется отношений изображений по Лапласу выходной переменной к входной (см. курс ТАУ).
2) Показатели качества переходного процесса. Рассмотрим переходный процесс в замкнутой системе:
а) Статическая ошибка б) Время переходного процесса в) Перерегулирование
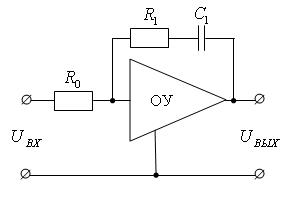
3) Типовые регуляторы. Используются в замкнутых системах для получения требуемых показателей качества. Наиболее часто применяются пропорциональные (П), пропорционально-интергальные (ПИ) и пропорционально-интегрально-дифференциальные (ПИД) регуляторы. Выбор типа регулятора определяется передаточной функции объекта управления. Передаточные функции регуляторов
ГЛАВА 4. ТИПОВЫЕ СЭП МЕТАЛЛОРЕЖУЩИХ СТАНКОВ
|
||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-30; просмотров: 843; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.219.86.191 (0.006 с.) |

 , ПП
, ПП  . Для защиты тиристоров применяют быстродействующие ПП серии ПНБ.
. Для защиты тиристоров применяют быстродействующие ПП серии ПНБ. .
. .
.
 переходят из временной t-области в р-область изображений, где р (s) – оператор дифференцирования (Лапласа),
переходят из временной t-области в р-область изображений, где р (s) – оператор дифференцирования (Лапласа),  . При этом ДУ заменяются АУ.
. При этом ДУ заменяются АУ.
 ;
; – время последнего вхождения регулируемой величины в 5% зону;
– время последнего вхождения регулируемой величины в 5% зону; ;
; ;
;  ;
; 



 ;
; 


 ;
; 




